

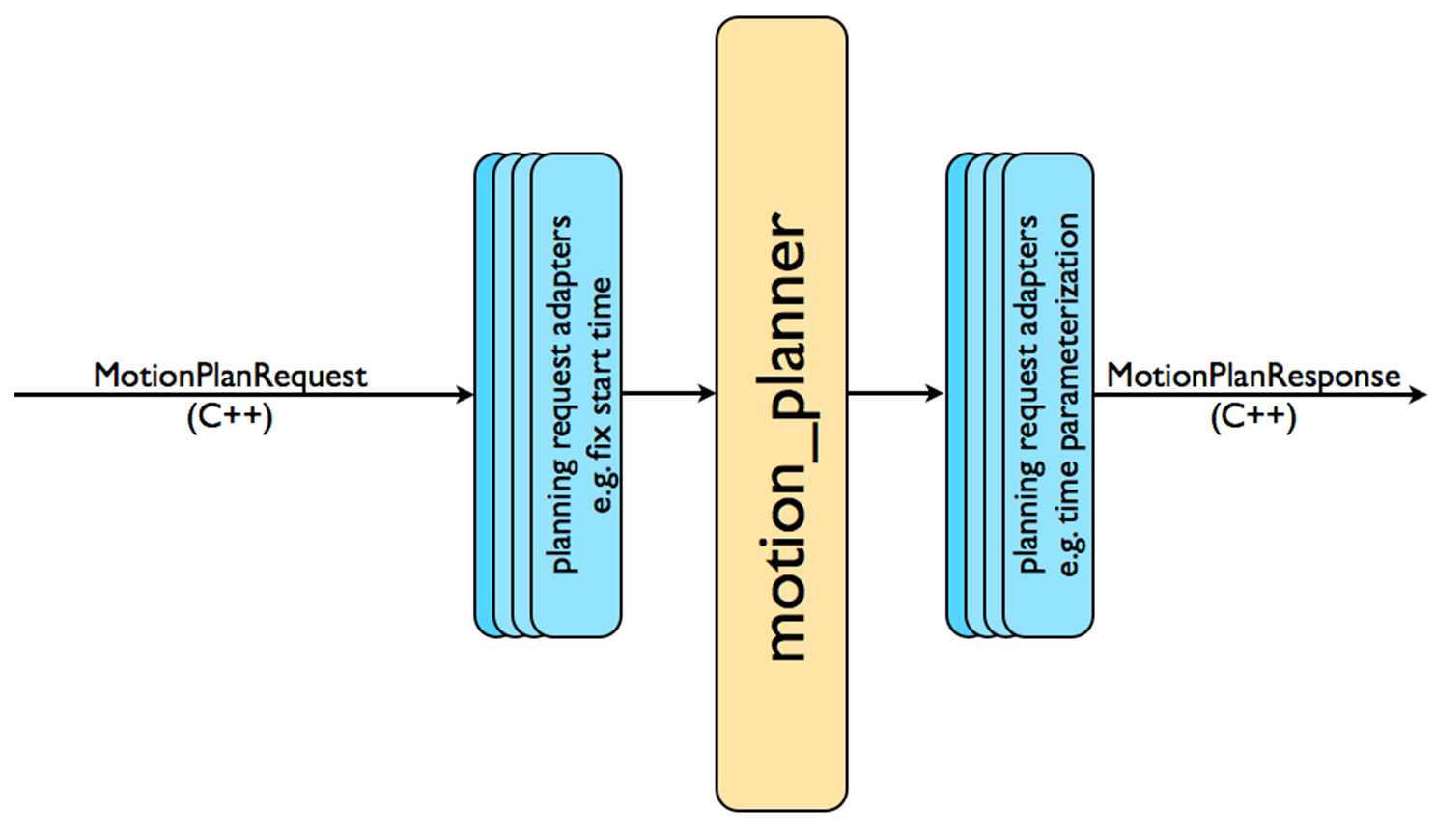
用了这么久ROS MoveIt,你真的了解它么? 你可能使用MoveIt控制过实物机器人,但是MoveIt运动规划的pipeline是什么? 你可能听说过ROS的插件机制,但是如何通过代码实现一个插件? 你可能尝试更换过MoveIt的运动规划器,但是如何调用自己的运动规划算法? 如果你也有这些疑问,欢迎来到这里我们一起探讨。 课程目的: 《如何在MoveIt中集成自定义运动规划算法》课程将为你揭开MoveIt pipeline的神秘面纱,了解MoveIt运动规划的底层奥秘。
 深入介绍MoveIt的插件原理与实现机制,学习如何在ROS中扩展无限可能。
深入介绍MoveIt的插件原理与实现机制,学习如何在ROS中扩展无限可能。 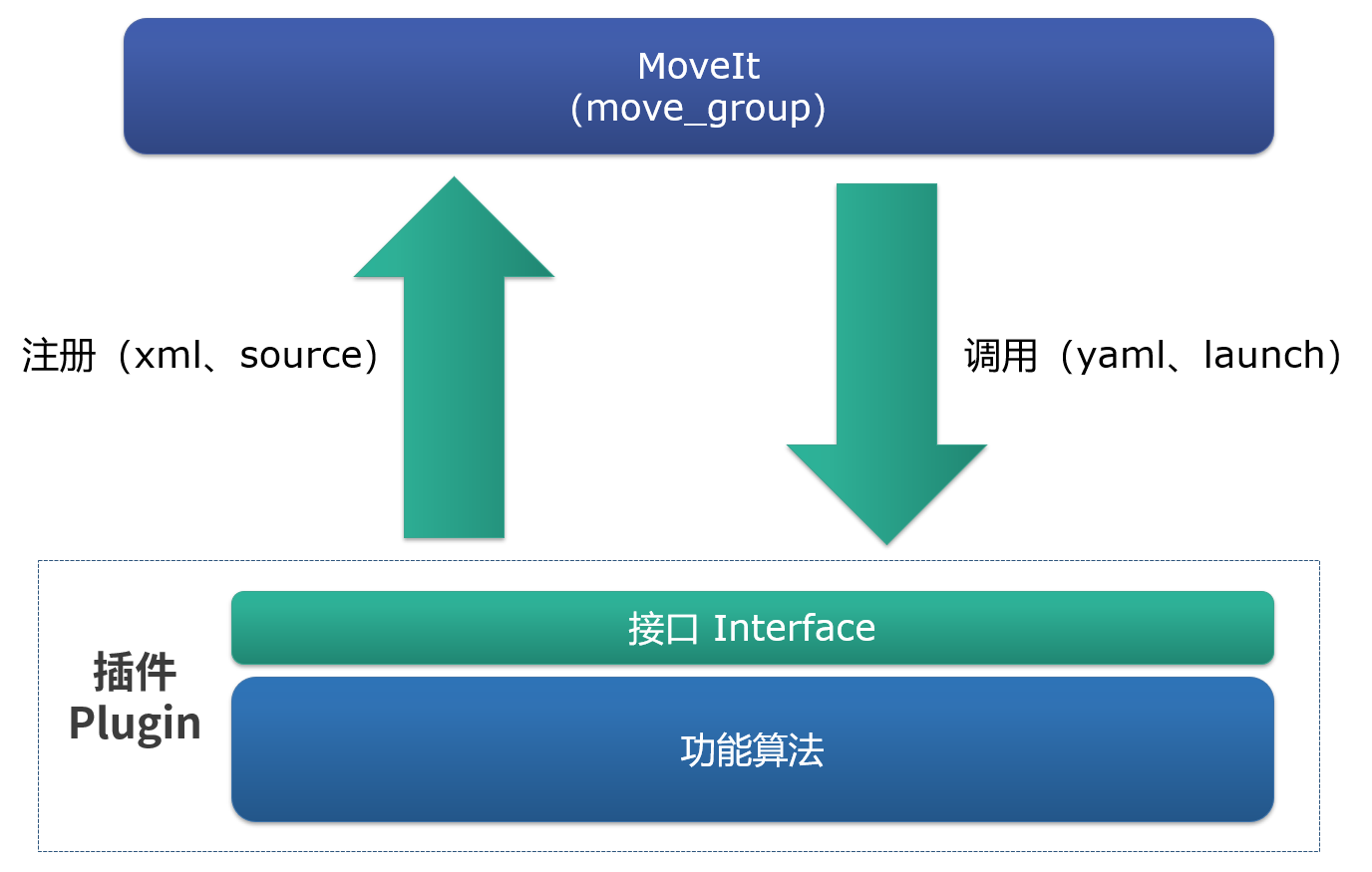 当然最重要的是,我们一起来开发一款MoveIt插件吧,将一个完整的运动规划算法做成插件,从此摆脱OMPL的束缚。
当然最重要的是,我们一起来开发一款MoveIt插件吧,将一个完整的运动规划算法做成插件,从此摆脱OMPL的束缚。  最终我们将达成以下效果,MoveIt已经妥妥的在运行我们自己的运动规划算法,是不是可以开心的研究算法啦!
最终我们将达成以下效果,MoveIt已经妥妥的在运行我们自己的运动规划算法,是不是可以开心的研究算法啦!  课程内容: 1.MoveIt插件机制简介 2.运动规划插件开发方法 3.1.运动规划插件实现案例(上) 3.2.运动规划插件实现案例(下) 4.课程小结&作业 课程资料请在古月居微信公众号后台回复“ROS进阶攻略”获取
课程内容: 1.MoveIt插件机制简介 2.运动规划插件开发方法 3.1.运动规划插件实现案例(上) 3.2.运动规划插件实现案例(下) 4.课程小结&作业 课程资料请在古月居微信公众号后台回复“ROS进阶攻略”获取
还在等什么?点击右侧的链接一起来学习吧!现在报名还有限时团购折扣哦~《如何在MoveIt中集成自定义运动规划算法》



评论(0)
您还未登录,请登录后发表或查看评论