文章目录
- 介绍
- minitaur urdf解析
- base_chassis_link
- chassis right
- motor
- upper_leg
- lower_leg
- 注意
介绍
URDF全称为Unified Robot Description Format,中文可以翻译为“统一机器人描述格式”。与计算机文件中的.txt文本格式、.jpg图像格式等类似,URDF是一种基于XML规范、用于描述机器人结构的格式。根据该格式的设计者所言,设计这一格式的目的在于提供一种尽可能通用(as general as possible)的机器人描述规范。URDF创造的机器人模型包含的内容有:
- 连杆 link
- 关节 joint
- 运动学参数 axis
- 动力学参数 dynamics
- 可视化模型 visual
- 碰撞检测模型 collision
minitaur urdf解析
base_chassis_link
<link name="base_chassis_link">
<visual>..第一个长方体.</visual>
<visual>..2..</visual>
<visual>..3..</visual>
<collision>...</collision>
<collision>...</collision>
<collision>...</collision>
<inertial>...</inertial>
</link>
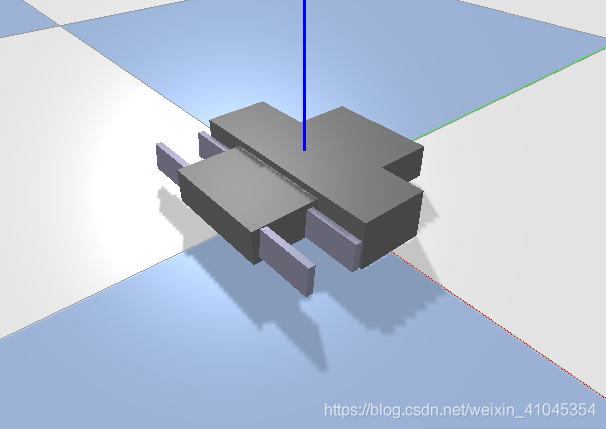
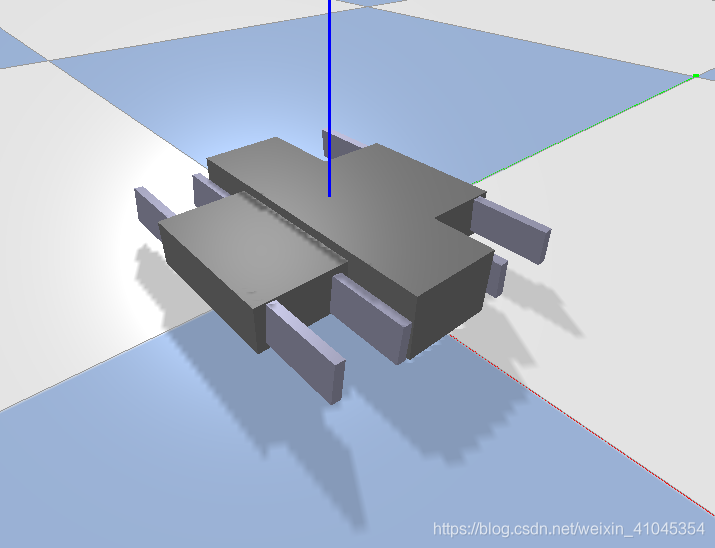
效果如下:

chassis right
<link name="chassis_right">
<visual> .... </visual>
<visual>.... </visual>
<collision> </collision>
<collision> ....</collision>
<inertial>.... </inertial>
</link>
要添加一个joint约束位置,不然会报错
<joint name="chassis_right_center" type="fixed">
<axis xyz="0 0 1"/>
<parent link="base_chassis_link"/>
<child link="chassis_right"/>
<origin rpy="-0.0872665 0 0" xyz="0.0 -0.10 0.0"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
chassis left 同理
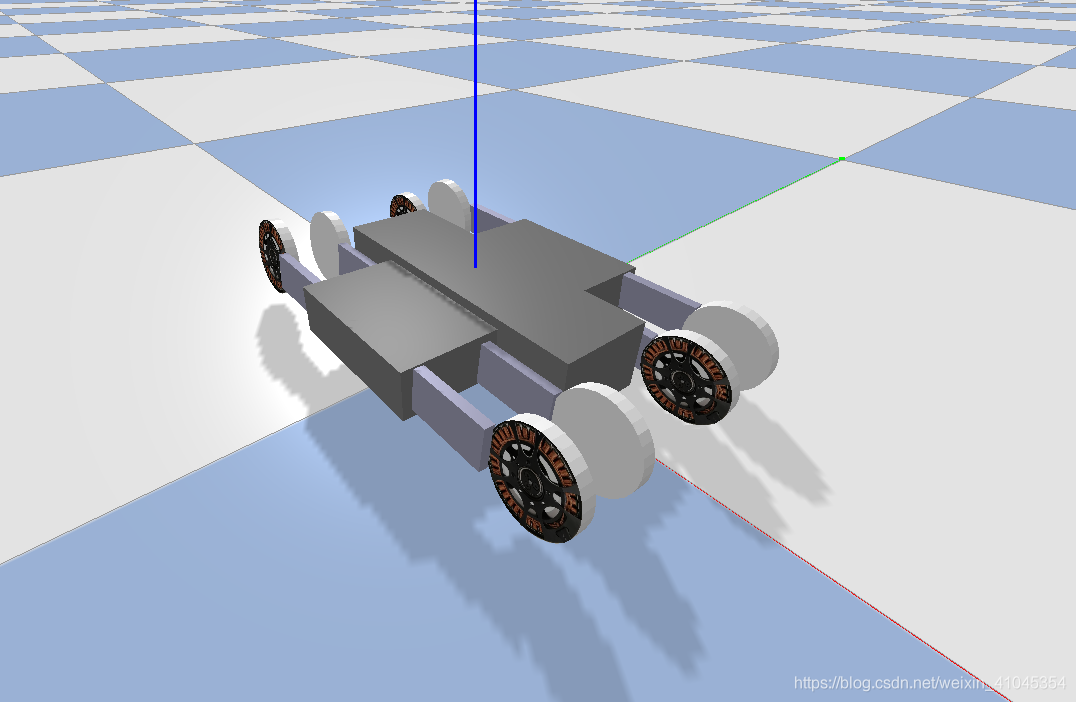
motor
<link name="motor_front_rightR_link">
<visual>
<geometry>
<mesh filename="tmotor3.obj" scale="1 1 1"/>
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<geometry>
<cylinder length="0.026" radius="0.0434"/>
</geometry>
</collision>
<inertial>
<mass value="0.25"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
<joint name="motor_front_rightR_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="chassis_right"/>
<child link="motor_front_rightR_link"/>
<origin rpy="1.57075 0 0" xyz="0.21 -0.025 0"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
上述为右边电机,其余位置安装同理
upper_leg
<link name="upper_leg_front_rightR_link">
<visual>
<geometry>
<box size=".01 0.01 .11"/>
</geometry>
<material name="grey">
<color rgba="0.65 0.65 0.75 1"/>
</material>
</visual>
<collision>
<geometry>
<box size=".01 0.01 .11"/>
</geometry>
</collision>
<inertial>
<mass value="0.05"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
注意对于upper_leg左右关节命名不一样,但其实是同一类型关节,这里涉及到minitaur仿真环境中的一些设置
右
<joint name="hip_front_rightR_link" type="fixed">
<axis xyz="0 0 1"/>
<parent link="motor_front_rightR_link"/>
<child link="upper_leg_front_rightR_link"/>
<origin rpy="-1.57075 0 0" xyz="0.0 0.06 -0.015"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
左
<joint name="motor_front_rightL_link" type="fixed">
<axis xyz="0 0 1"/>
<parent link="motor_front_rightL_link"/>
<child link="upper_leg_front_rightL_link"/>
<origin rpy="-1.57075 0 0" xyz="0.0 0.06 -0.015"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
lower_leg
<link name="lower_leg_front_rightR_link">
<contact>
<stiffness value="10000"/>
<damping value="10"/>
<lateral_friction value="1"/>
</contact>
<visual>
<origin rpy="0.0 0 0" xyz="0 0 .1"/>
<geometry>
<box size=".01 0.01 .2"/>
</geometry>
<material name="grey">
<color rgba="0.65 0.65 0.75 1"/>
</material>
</visual>
<collision>
<origin rpy="0.0 0 0" xyz="0 0 .1"/>
<geometry>
<box size=".01 0.01 .2"/>
</geometry>
</collision>
<inertial>
<mass value="0.05"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
lower_leg的关节以knee开头命名,joint类型为revolute的需要加入限制,不加模型会报错
<joint name="knee_front_rightR_link" type="revolute">
<axis xyz="0 1 0"/>
<parent link="upper_leg_front_rightR_link"/>
<child link="lower_leg_front_rightR_link"/>
<origin rpy="0 0 0" xyz="0.0 0.01 .055"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint>
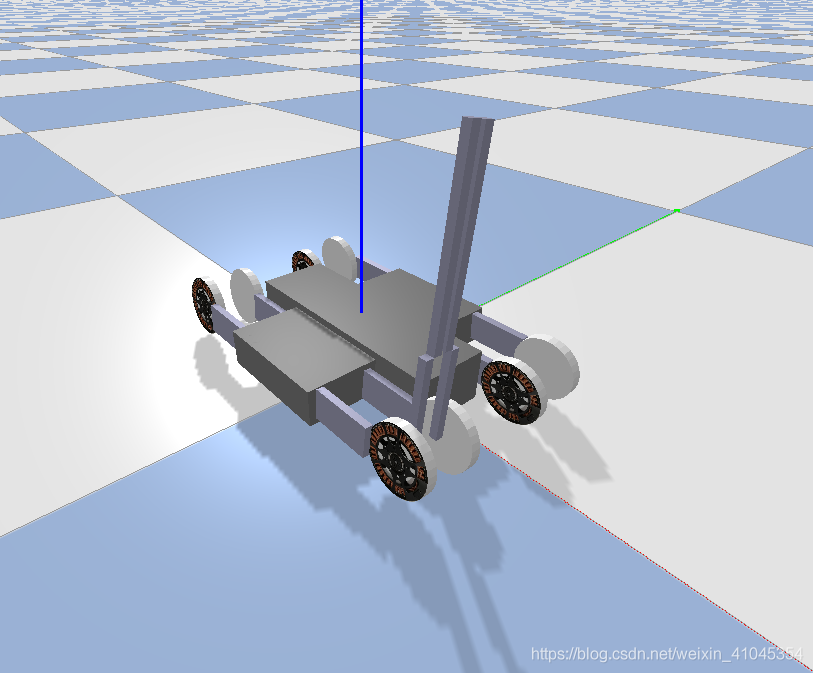
注意
link和joint都配置好后大概就是这个四脚朝天的样子了(图一),但是建模其实还没有完成,因为各个关节都是开环的(不是并联机构),简单来说就是这时候的minitaur足端是分离的(图二)
urdf部分的使命已经结束了,并联机构部分我们需要在bullet里面添加约束才能实现,使用
createConstraint()
self._pybullet_client.createConstraint(
self.quadruped, self._joint_name_to_id["knee_" + leg_position + "R_link"],
self.quadruped, self._joint_name_to_id["knee_" + leg_position + "L_link"],
self._pybullet_client.JOINT_POINT2POINT, [0, 0, 0], KNEE_CONSTRAINT_POINT_RIGHT,
KNEE_CONSTRAINT_POINT_LEFT)
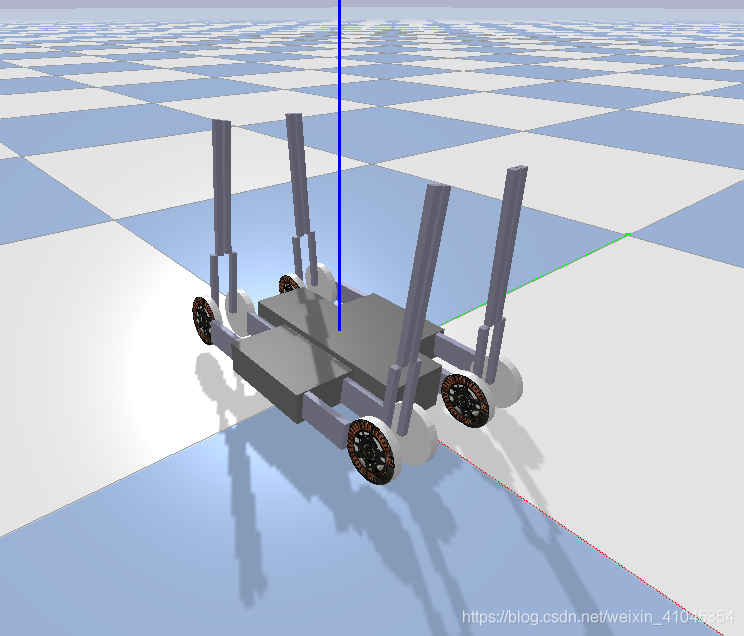 图一
图一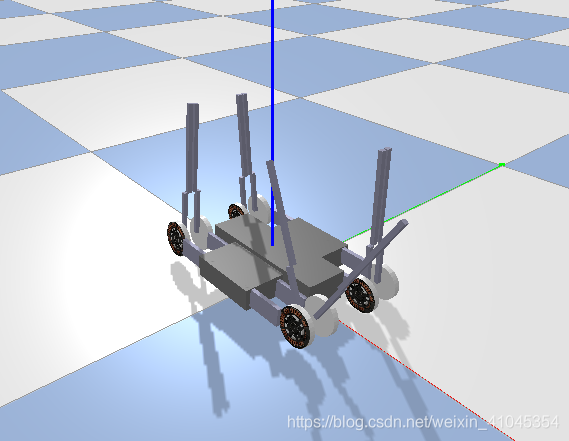






评论(0)
您还未登录,请登录后发表或查看评论