

课程目的
在之前的学习中,大家对ros、slam等知识有了一定的了解,但是大多数的学习资料都是基于两轮或四轮差速的机器人模型。
那么本次课程我们将会介绍阿克曼转向结构的机器人建图、导航仿真。课程主要对机器人仿真模型与运动学模型进行介绍,使用teb_local_planner导航插件,让机器人在gazebo中实现导航。

(阿克曼小车的运动学模型)
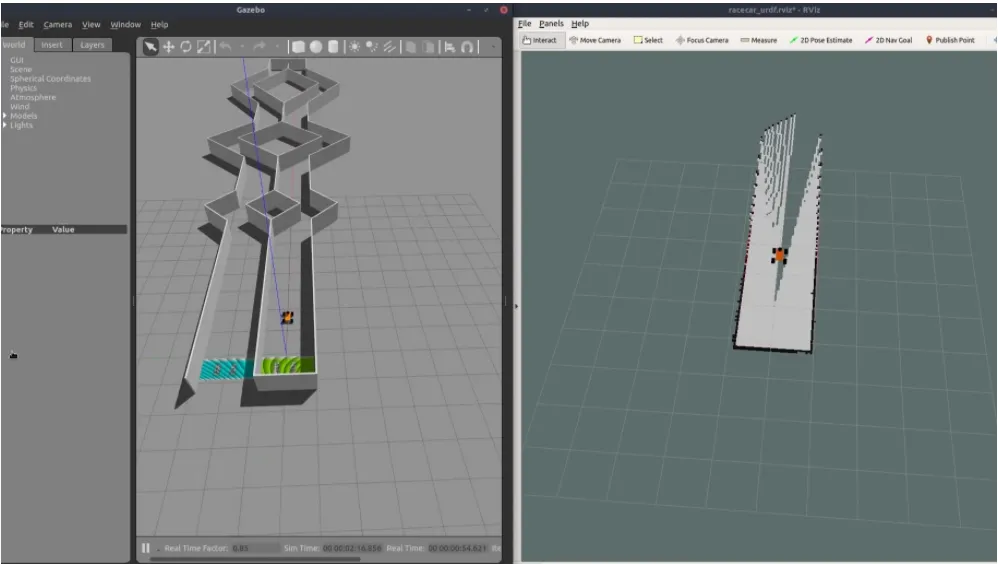
(阿克曼小车的建图仿真)

(在gazebo中实现导航仿真)
课程内容
1. 阿克曼转向车的仿真环境搭建
2. 运动学分析和里程计计算
3. 使用slam_gmapping建图
4. 使用teb_local_planner实现导航仿真
5. 课程总结
*课程资料请在微信公众号“古月居”后台回复“仿真控制资料”获取
省钱秘笈

两人拼团即可享受本次优惠
三人拼团还能再减三元!
古月君在知识的海洋中等你~
心动不如马上行动吧!




评论(0)
您还未登录,请登录后发表或查看评论