


图1 Dextrous Robotics快照
抛开炒作不谈,能够让机器人参与现有的工作流程并能够立即产出大量价值的领域并不多。最近看到几家机器人公司涉足了搬运箱子的领域,也就是用机器人从卡车后部卸下箱子,这种做法在理想情况下比传统人类搬运要快得多。搬运箱子对机器人来说是一项能够让他们发挥自身优势的任务,即可在半结构化且通常可预测的环境中工作,并且任务本身对速度、功率和精度等要求很高(这些都不是人类感兴趣和擅长的点)。
由Evan Drumwright领导的初创公司Dextrous Robotics提出了一种完成箱子搬运的新方法,就是在没有任何吸力或任何类型的夹具的情况下对箱子进行操作。他们采用了一对“移动手臂”,并且每个手臂都握着一根机器人的专用筷子。
“我们基本上可以用筷子拿起任何东西。如果你用筷子好,你可以拿起一粒米,你可以拿起比筷子尺寸相对大的东西。你的想象力是有限的,所以如果你有一个可以用筷子操纵物体的机器人是不是很酷?”——Evan Drumwright
这绝对很酷!但是使用筷子来搬运箱子有什么实际原因吗?
当然有!筷子的好处在于它们几乎可以夹住任何东西(即使你把筷子放大),这使得它们在形状、尺寸和重量差异很大的有限空间中特别有价值。筷子也很适合操纵,能够精确地推动和重新定位物体。虽然 Dextrous最初专注于拖车卸载任务,但拥有这种额外的能力将使他们能够在未来执行更困难的任务,例如更难让机器人参与其中的拖车装载等高频任务。
“筷子”技术虽然有明显的优势,但也有缺点,最大的可能就是这样的操作技术难度要大很多。
Drumwright告诉我们“筷子的缺点是需要一些复杂的控制软件才能操作,但这就是我们能够做到的:不仅是巧妙的硬件设计,还有操作它的软件”。
到目前为止,该领域的其他公司非常一致地用抽吸系统处理箱子。如果有一个平坦的、不可渗透的表面(与大多数箱子一样),吸取技术就可以快速可靠地工作,并且需要最少的花里胡哨的规划。但吸力的操作形式是有限的,因为它的吸附能力实在过强,难以执行高精度的任务。吸力还存在其他问题:对温度和湿度敏感,会吸入污垢以及需要根据预估要处理的最大和最重的物体来设计吸力阵列。
最后还有一个特殊的问题——当期望操纵小物体时只能使用远超期望值的吸力阵列。
上述这些缺点并不是说吸力在所有情况下都较差,Drumwright承认吸力可能会是某些特定任务的好选择,但是如果他们可以让筷子发挥作用的话,筷子操作将会是更加通用的方法。

图2 Dextrous Robotics联合创始人Evan Drumwright和Sam Zapolsky
我认为大自然赋予我们双手是有原因的。大自然知道如何设计抽吸装置——蝙蝠有,章鱼有,青蛙有——而我们有手。为什么?手是一种高级工具。所以,这就是我们走这条路的原因。我个人相信,基于数十亿年的进化,用手操纵存在优越性是有原因的。——Evan Drumwright
Dextrous的秘诀之一是重视仿真。硬件很难,所以希望做一个第一次就可以工作的东西,而不是一遍又一遍地迭代。第一次尝试就让它完美可能是不现实的,但你能提前仿真得越好,你就能越接近现实。“我们能够做的是设置我们的整个规划感知和控制系统,使其看起来与在真实机器人上运行代码时完全一样。”Drumwright说:“当我们在仿真机器人上运行某些东西时,约95%的时间与现实相符,坦率地说,这种情况前所未有。”因为使用了高保真度的硬件建模、实时模拟器和可以直接在仿真和现实之间转换的软件,所以在包含接触和静摩擦等公认难以仿真的环境中,Dextrous也能够自如地模拟他们的系统如何执行。
为什么这个系统使用光滑的圆形筷子,而不是有点抓附力的筷子,比如方形横截面或内表面摩擦力大的筷子呢?
Drumwright 解释说,这种设计的优势在于圆形筷子围绕其旋转轴对称,这意味着只需要五个自由度即可完全控制它。“实际上这意味着事情可以变得更简单——控制算法变得更简单,逆运动学算法变得更简单,重要的是我们需要在机器人中驱动的电机数量减少。”
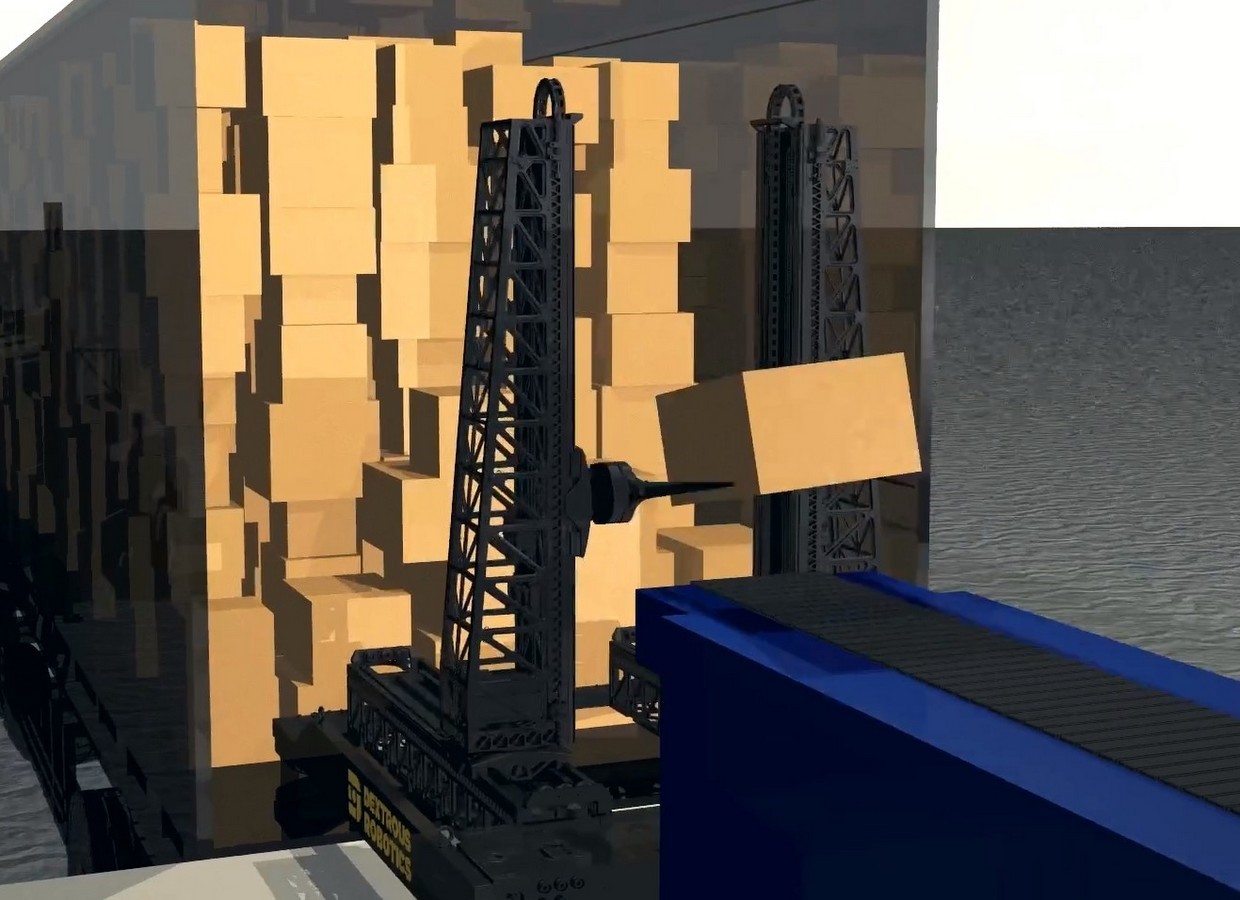
图3 Dextrous Robotics硬件的仿真版本
Dextrous 在18个月前获得了种子资金,从那时起,他们一直在为系统开发软件和硬件,并且获得 NSF SBIR 第一阶段的资助。上面的图片显示了他们正在开发的硬件仿真——Franka Panda手臂(两个塔上的筷子操纵器可以横向移动),这同时可用于验证他们的软件系统。新硬件应该马上能够完成,在接下来的一年里,Dextrous期待与客户进行真正的付费试点。
原文链接:


评论(0)
您还未登录,请登录后发表或查看评论