

国际标准化组织(ISO)对机器人定义为:“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务”。其中,“具有几个轴”这一特点已经成为多自由度运动机械的重要运动部分。当前设备通常会采用多台单自由度的驱动电机结合复杂的传动机构实现系统的多自由度运动,以便在三维空间中获取不同的运动轨迹和执行动作。虽然可以通过多个单轴产生多自由度运动与外部连杆或传动机构串联或并联的旋转电机,但是此类系统也具有一些固有的缺点:
(1)多自由度机构的结构复杂性通常会导致其工作空间中的运动学奇点,大大降低了其运动灵活性;
(2)多自由度机构中的多个单轴致动器的连杆附加质量和转动惯量使其体积庞大和动态性能差;
(3)运动部件之间的摩擦导致磨损,加上运动传动机构(如齿轮、同步带和电机与末端执行器之间的外部连杆)的齿隙,严重影响实际运动控制的精度和鲁棒性。
(4)传动机构中的(摩擦和背隙)非线性使得力/扭矩操纵极难控制,这对于康复和触觉使用等应用至关重要。
一种单台电机实现多自由度运动的球形电机被提出,这是一种基于中心球关节的三自由度电磁驱动电机,在多自由度执行器领域中具有广泛应用前景,如图1,具备结构紧凑、响应迅速、无转动奇异点等优点。

图1球形电机应用前景
球形马达有多种形式,可分为电磁、压电(或超声波)和电缆/轮驱动系统,大多数球形电机基于电磁原理,包括感应、直流 (DC)、步进、可变磁阻 (VR)和永磁球形电机 (PMSM) 。本文从球形电机的发展史开始简介,重点揭示球形电机的结构特点和运动原理,以及简单介绍力学模型和控制算法。
一、发展概述
- 二十世纪五十年代,前苏联学者研制了具有自整角机原理的球形电机,是最先对球形电机进行的基础性研究工作[1];与此同时,英国F.C.Williams等人研制了一种变速球形感应电动机,电机的旋转轴是固定的,定子块可以预倾斜以调整旋转速度范围,定子和转子都可以转动[2,3]
- 1959年,英国学者一种感应Laithwaite等人也研究了感应式球形电机,用于优化异步电机的调速性能[4]
- 1984年,日本学者根掘平面磁阻步进电机的原理研制了一种基磁阻式球形电机[5]
- 1987年,Davey等人研究了异步球形电动机内的电磁场[6]
- 1988年,美国乔治亚理工学院Lee等人首次设计了变磁阻式步进球形电机[7]转子中具有钕铁基永磁体和定子中的线圈的球形步进器提供了相对较大的运动范围±45°,并且在运动中具有各向同性特性;Lee 和 Son 还提出了一种球形轮电机,将转子运动解耦为 2-DOF 倾角和 1-DOF 轴旋转;并且控制性能已经过测试。
- 1989年,日本应用电子实验室研制了一台永磁球形电动机,该电动机球形转子上有四块小磁铁,定子上的三套球面绕组按照30°偏角顺序放置,原理类似三台无刷直流电动机的组合[8]。严等人开发了一个实验原型来验证分析扭矩永磁球形致动器的模型,由锥形定子线圈和二面形转子PM组成。基于与电机转矩和设计参数相关的分析模型,研究了参数对转矩输出的影响(如线圈和永磁极的几何形状以及结构材料),从而得出了一种具有堆叠圆柱形永磁体的永磁同步电机设计转子磁极以方便制造。
- 1997年,英国国 谢菲尔德大学研制开发了一种永磁球形电机,可在空间内做两自由度运动[9]
- 1999年,Lee等人改进了电机结构,将轴承系统改为非接触式空气轴承系统;
- 我国对球形电机的研制起始于20实际80年代后期,华中理工大学黄声华、浙江大学曹志彤、合肥工业大学、吉林工业大学、哈尔滨工业大学等都研制出了各自的多自由度电动机样机。
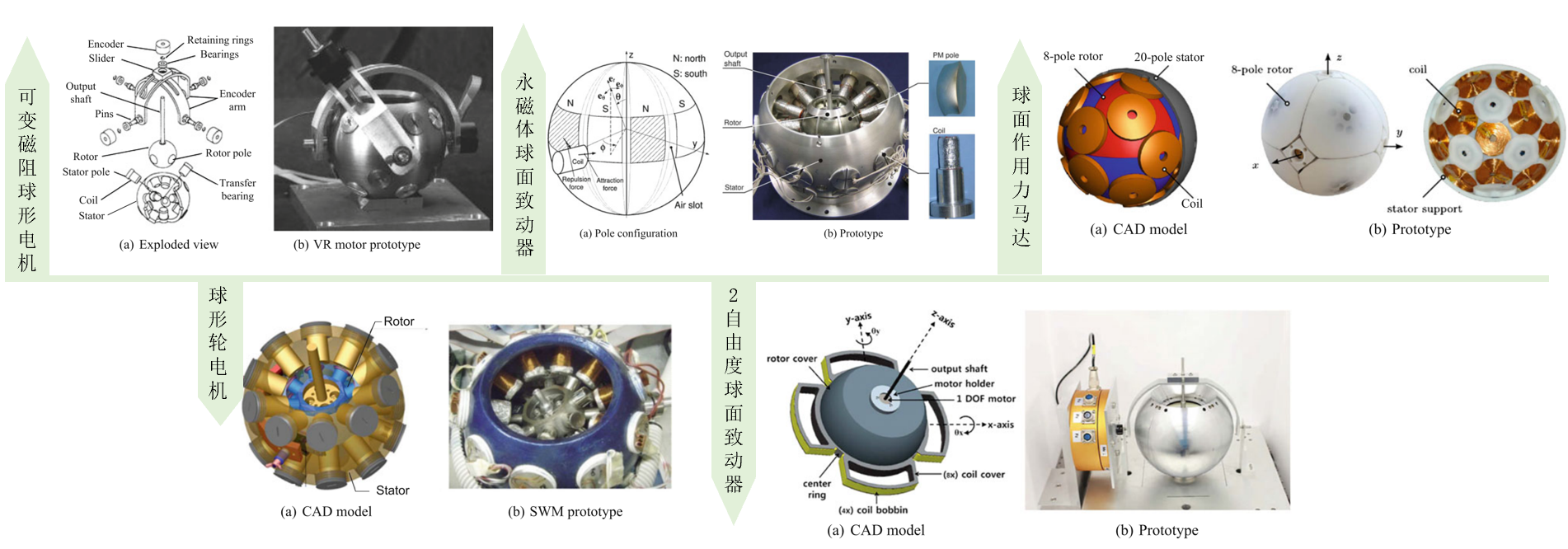
图2 球形电机发展
二、球形电机的分类和结构
2.1 分类
球形电机按照不同的工作原理可以分为感应式球面三绕组电机、永磁转子凸极式同步电机、球面步进电机、框架式球电机四类。
2.2 结构[10]
(1)感应式球面三绕组电机
感应式球面三绕组电机是根据“三套正交绕组定位理论” 的感应式电机,是较早出现的一种球形关节电机,如图3所示,电机的结构模型。该电机在球形定子内侧面绕有三套在空间互相正交的绕组,当控制三套绕组使其流过不同的交变 流 时,可 在空 间产生球面运动的磁场。球形电机转子为实心圆导磁体, 外表面均匀地涂有一层良导体材料,其作用类似于异步电机的转子绕组, 以构成任何方向都导通 的短路环。 三套绕组的电流变化使空间磁场沿着所需方向运动,在转子导体表面形成切割电势和电流, 带动转子在球面坐标上活动
。 这种电机的定位力矩 (堵转力矩 ) 较小,且效率比较低,不宜低速或堵转运行, 电机的位置速度检测也较复杂。
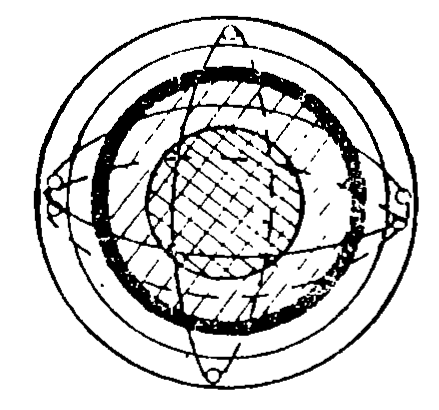
图3 感应式球面三绕组电机结构模型
(2)永磁转子凸极式同步电机[11]
该电机由转子轭 、 永磁体及带底座的输出轴组成,电机的转子轭材料为非导磁材料的硬铝制成 , 在转子上开有孔槽 , 用于安装永磁体 。用于转矩输出的转子输出轴放置在转子的顶端 输出轴的底座上有 四 个通孔 ,用螺栓将其固定在转子顶部 。 永磁体嵌在转子主体上 ,永磁体为轴向充磁 圆 柱状, 轴向充磁有利于降低制造成本, 圆柱形状便于永磁体的固定安 装 , 永磁体的轴向 长度能够增 加气 隙磁场 强度 。 永磁体沿球体赤道面对称分布有层 , 每个半球有两层 , 永磁体按照 N、S 极交替 的规律排列 。 输 出 轴 的底座上有 四 个通孔 , 可通过螺栓将输 出 轴 固 定在转子顶部多自由度球形电机的结构围绕核心的球关节展开:里层布置了通电线圈的球形定子包围固定住中心的球关节,外层布置了永磁体的球形转子通过中心球关节的伸出轴倒扣式包覆在球形定子上。整体运动模型类似空间倒立摆,可以实现空间 360 度方向自转和一定角度倾斜。球形电机的多自由度特性决定了其姿态测量的复杂性,其控制的精确性同时要求姿态测量系统的具有较高精度。

图4 永磁转子凸极式同步电机
球形电机的运动原理为,球形电机的基底夹具通过转子轴和球轴承与定子连接,转子固定在基底夹具上,在球轴承的作用下可三自由度转动,定子上安装有 EM(电磁线圈),转子上安装有 PM(永磁体),对 EM 通电与 PM 之间产生电磁力使球形电机运转。
(3)球形步进电机
球面步进电机是 由平面二 维运动的步进电机演变而来 的,, 其工作原理如图5所示,在转子球表面和定子极 内圆表面 开有许多均匀 的小齿块,通 过控制定子极 线 圈的通电顺序, 完成球面运动。步进式球形 关节电机的特点是能实现 开环控制, 能精确定位, 有较大的 静态 力矩, 但圆表面 的小齿块加工复杂
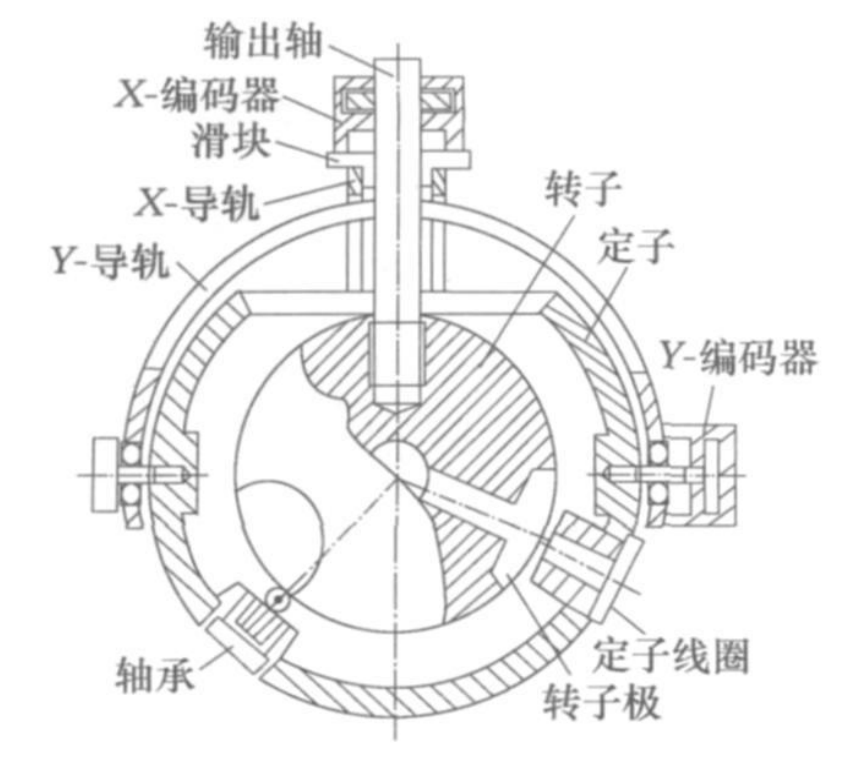
图5 球面步进电机
(4)框架式球电机[12]
框架结构 电机是 由两 个 电气上 互相 独立的 电机组合而成 的,其 活 动结构 类似于 陀螺仪,内电机作旋转运动, 带动整装 置绕主轴旋转, 外 电机 作摆动。两者运动的组合可 使电机出轴的末端在一球面上运动。由于这种结构 中二个转动电机都互相独立,在 电磁分析、机械结构加工、 安装 等方面都 比前面三种球面转子结构 要 方便,而且 由于其活动是沿二个 固定轴作旋转运动,因此容易实现位置、 速度等检测和 控制。

图6 框架式球电机
球形电机结构简单,但多自由度的运动传感在闭环控制中起着重要作用。永磁式球形电机的方向感知可通过多种技术实现,如图7所示,将运动分解为3个独立方向,用三个单轴编码器/传感器进行测量,但是这种方式引入了额外的机械摩擦和惯性,限制了球形电机的性能。倾角计、加速度计和其他惯性和陀螺仪传感器提供了另一种测量方向/位置的方法。然而,这些必须直接连接到运动体上的传感器会给系统带来额外的惯性和动态不平衡;电力和信号传输还需要额外的模块/桥接器。 PMSM 的磁场也会影响这些传感器的读数,因为磁力计通常包含在这些传感器中用于传感器融合,以消除陀螺仪计算中的漂移问题。

图7 感知机理示意图
用于非接触的感测方式可以避免上述提到的问题,如图8所示,开发一种基于视觉的 3 自由度方向传感器 ,该传感器读取打印在球面上的编码网格线,可以采用非线性优化算法进行视觉测量。另一种非接触方式是激光的定向测量,但这种方法需要一个平面反射板,该反射板必须专门制造并安装在转子上。还有一种方式是基于场的测量方法,如基于反电动势的传感方法和基于磁传感器的转子磁场测量等,通过测量 EM 绕组上的电压变化同时检测 3 自由度方向和角速度,这种方法无需在 PMSM 中安装外部传感器。
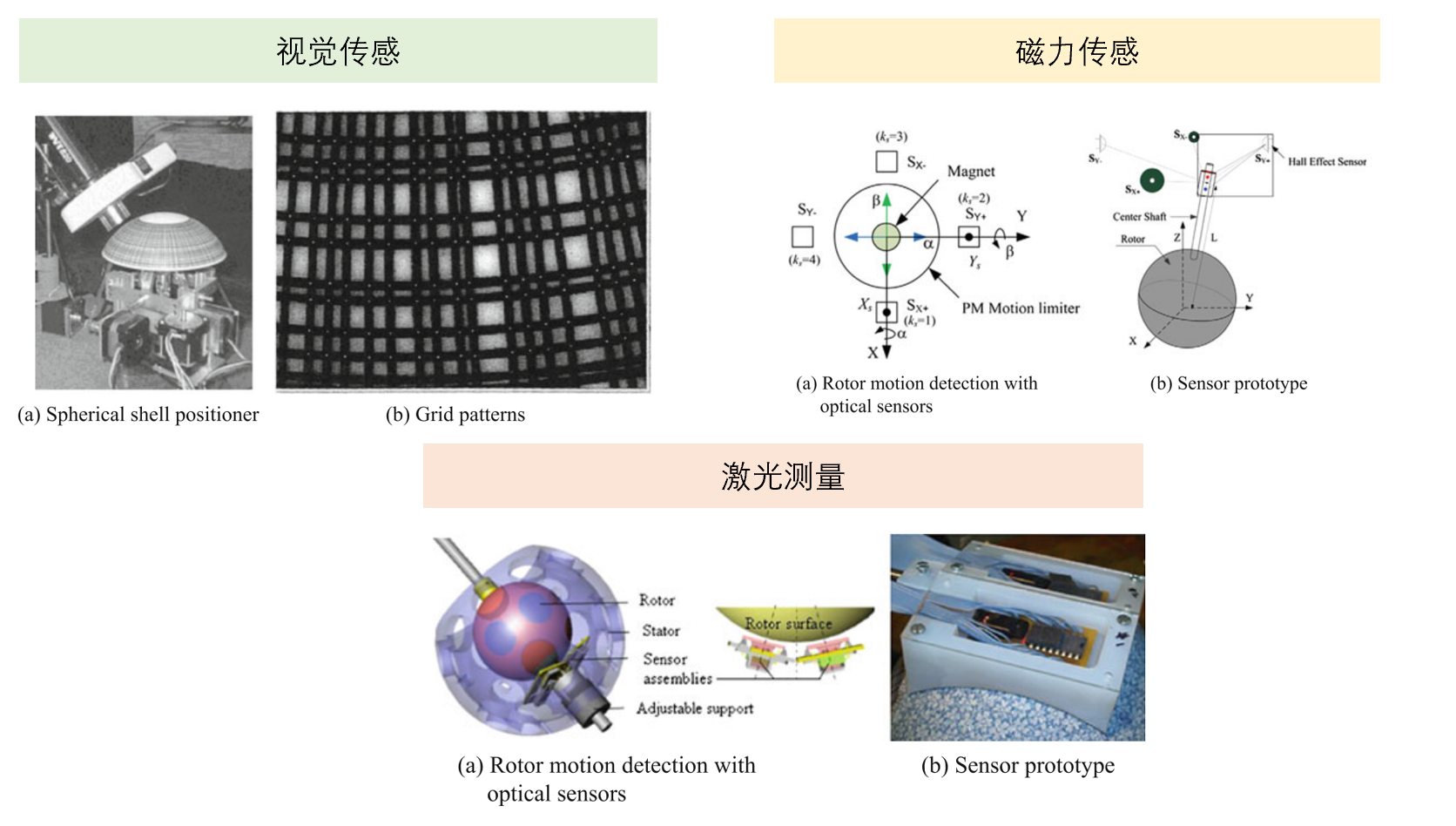
图8 非接触感测方法
总体来说,球形电机的设计结构通常由带轴定子(转子)和球形转子(定子)组成,其中转子由球形接头同心支撑,可以在 3-自由度内空间运动。 PMSM 有两种典型配置,如图9所示,其中转子分别位于定子内部(连接轴)或定子外部(围绕球形定子)。一般前一种设计适用于转子连接的情况,带有末端执行器,后者适用于多自由度阶段或平台。
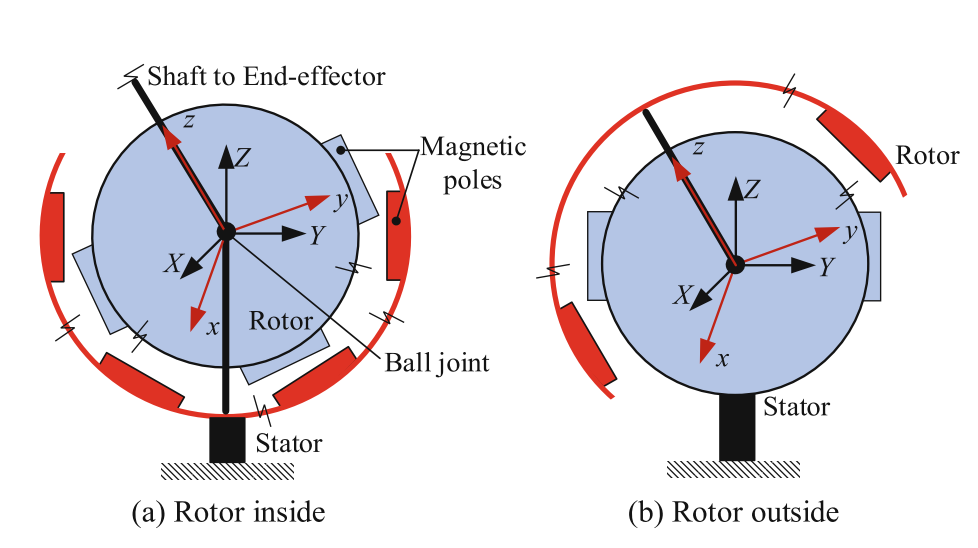
图9 永磁球形电机设计概念
值得一提的是,球形电机技术目前尚不成熟,处在研究阶段,没法完成工业应用,理论上球形电机就是完成多自由度的运动,简化机械结构,只是目前无法实现商业化使用,还待更多实验探究。
参考文献
[1]黄声华, 陶醒世.三自由度球形电动机的发展[ J] .电工电能新技术, 1989, 17(1).
[2]William, F., Laithwaite, E., and Piggot, L.,"Brush less Variable-Speed Induction Motors , 'IProc. IEEE, No. 2097U, pp.102-118, 1956.
[3]Williams, F., Laithwaite, E., and Eastham, G.F. "Development of Design of Spherical Induction Motors," Proc. IEEE, No. 3036U, pp.471-484, 1959.
[4] Laithwaite, E., "Design of Spherical Motors,"Electrical Times, vol. 9, pp. 921-925, 1960.
[5]藤守弘.球面 バルスモへタ[ P] .日本专利, 昭 60 -139159.
[6]DaveyK, VachtsevanosG, PowersR.The analysis of fields and torques in spherical induction motors[ J].IEEE Trans. on Magn., 1987, 23(1):273 -282.
[7] Lee K M , Vachtsevanos G , Kwan C . Development of a spherical stepper wrist motor[J]. Journal of Intelligent & Robotic Systems, 1988, 1(3):225-242.
[9]WangJ, Whng W, Jewell G W, et al.A novel spherical permanent magnet actuator with three degrees-of-freedom[ J]. IEEE Trans.on Magnetics, 1998, 34(4):2078 -2080
[10]范承志. 球形关节电动机概述[J]. 微电机, 1996, 29(1):3.
[11] Bai K , Xu R , Lee K M , et al. Design and Development of a Spherical Motor for Conformal Printing of Curved Electronics[J]. IEEE Transactions on Industrial Electronics, 2018:1-1.
[12]王张合, 曾励, 姜明明. 多自由度球形关节电动机的发展现状及研究方向[J]. 现代制造工程, 2010(1):5.
[13]http://www.actuator-lab.com/index.php/research/


评论(0)
您还未登录,请登录后发表或查看评论