

[1]Vitiello Tingfang-Yan-and-Marco-Cempini-and-Calogero-Maria-Oddo-and-Nicola. Review of assistive strategies in powered lower-limb orthoses and exoskeletons[J]. Robotics and Autonomous Systems, 2015, 64(期缺失): 120-136.
摘要
从20世纪60年代的早期研究开始,特别是最近20年(2015),矫形器和外骨骼得到了显著的发展。它们被设计在不同的体系结构中,以帮助用户移动。文献中对下肢装置的研究更为丰富:一个主要原因是它们处理的是一项基本但很必要的运动任务,即行走。与上肢相比,腿部外骨骼的设计更为简单,但在新兴的人类机器人互动系统中,它们仍有特定的认知和身体需求。在目前的技术水平下,可以很容易地找到不同的控制策略和方法:开发一种使外骨骼提供有效和自然援助的辅助策略仍然是一个挑战。因此,本文旨在对主动运动增强矫形器和外骨骼提供的辅助策略进行系统的综述。根据Web of Science 和Scopus收集的文献,我们研究了主要的机器人设备,重点是控制它们提供援助的方式;并对相关验证进行了深入的研究,特别是对人在循环中的实验。最后,总结和讨论了当前辅助战略发展的趋势和面临的主要挑战。
Introduction
关于下肢矫形器运动辅助的最初研究可以追溯到20世纪60年代的美国1和前南斯拉夫2,分别用于军事和医疗服务3。从那时起,在不同类型的机械结构、执行器和接口中,矫形器和外骨骼得到了蓬勃发展。现在,它们是减轻物理治疗师的重复性和繁重的康复工作,同时改善康复效率——LokoMat 4, LOPES 5; 他们还旨在帮助截瘫或四肢瘫痪的人在日常生活中恢复运动能力——– ATLAS 6, ReWalkTM7,Ekso (Ekso Bionics, US, formerly e LEGs 8);它们被采用为增强系统,使健康的人能够承受沉重的负荷——BLEEX 9, Sarcos Exoskeleton 10,MIT Exoskeleton 11;此外,肌肉无力人士(例如长者)在行走或爬楼梯时,亦可使用它们提供额外的力量——HAL 12, HONDA Stride Management Assist (Honda, Tokyo, Japan).后者的出现是工业化国家人口老龄化的结果:2011年欧盟65岁以上人口占总人口的比例达到17.5%,预计2060年将达到29.5%13。同样,美国65岁以上人口比例在2011年为13.3%,比预期的2040年增长了21%14。由于这些国家的低出生率和高预期寿命,老龄化趋势不太可能停止。由于出生率低,如何在老年人的日常生活中提供帮助,特别是在行动和自治方面,从社会和伦理的角度都引起了相当大的关注。在这个技术变得更加人性化、智能化和安全的时代,开发用于物理援助的自立式下肢矫形器和外骨骼是最受关注的移动辅助选择之一。
最近发表的综述让我们有机会获得这些设备的普遍认可。2008年,A.M. Dollar与 H. Herr 对最著名的下肢外骨骼矫形器的驱动、感觉和控制系统进行了研究,包括全身、模块和单关节系统3; 然后,另一项工作提供了一个概述,从设备和穿戴者之间的相互安排的角度,无论是串联或并联15机器人系统。关于矫形器在损伤后或卒中后步态训练或神经康复中的应用,可在16171819中找到;对膝关节踝足矫形器的力学设计进行了分析20。除了以上针对多关节外骨骼或矫形器的研究,还有其他介绍单关节矫形器的文献综述:踝足矫形器(AFO)21的力学设计,以及机器人踝部系统22的控制算法。
虽然上述综述与我们的下肢可穿戴机器人控制研究课题相关,但缺乏对所采用的运动增强/辅助辅助策略的系统分析。外骨骼人机交互一般为双向23:机器人向人体提供机械动力和反馈信息,并从用户那里接收有意向的运动信息。前者更多地涉及硬件层面,而后者则更多地与一个高层控制器相关联,即一个控制层,该控制层负责解释感知信息,并决定何时以及如何向用户交付机械动力。该控制器可以代表可穿戴机器人的核心智能,定义为辅助策略。本文对动力下肢外骨骼矫形器的辅助策略及相关的实验验证成果进行了系统的综述。
特别是,在这篇综述文章中,我们将讨论下肢外骨骼的辅助策略,用于为健康的年轻人和老年人以及那些患有下肢肌肉无力或残疾的人的日常活动提供额外的能量。报道研究将根据高级控制策略分类,而不是使用外骨骼:从这个角度来看,设备专门解决神经康复或步态训练例如LOPES5,ALEX II 24将不会直接包括,因为这些系统的康复治疗的目标是覆盖用户意志运动和帮助他们从运动损伤中恢复(以这种方式,人类的机器人交互是低双向)。尽管如此,这些系统中的一些也可以用于运动辅助范例(即使它们的可用性本质上受到框架固定的机械架构的限制),并且相关的结果在这项工作中被报道。
论文结构如下:首先描述了文献检索方法,并将收集到的文献进行了分类。然后,根据所涉及的多关节外骨骼或单关节外骨骼,提出了相应的辅助策略。最后,对辅助策略的研究现状进行了总结,并对辅助策略的开发、调整和验证所面临的挑战进行了探讨。
文献检索方法
为了获得我们评论范围内的出版物集合,我们在Web of Science和Scopus上进行了一次论文搜索,其中包含了6个不同主题的关键字:
Topic = (leg OR hip OR knee OR ankle OR foot OR (lower AND (limb* OR extremity OR body))) AND Topic = (power* OR active) AND Topic = (aid OR assist* OR improve* OR augment* OR enhance* OR climb stairs OR reinforce*) AND Topic = (ortho* OR exoskeleton* OR wearable robot* OR portable robot* OR robot suit)AND Topic = (control* OR validation*) NOT Topic = (post stroke).
基于以上关键词,我们最初获得了723篇论文(文献研究更新至2014年7月):来自Web of Science的428篇,来自Scopus的295篇,共有25篇相同的文献。有可能在其研究领域的基础上进一步排除一些结果:论文相关的一些特有的医药专业领域而不是与运动辅助技术(如生理学、手术、兽医、营养),论文从工程研究文件但不解决外骨骼控制和援助(如假肢、材料科学、制造),和一些论文属于完全不相关的领域(例如声学、光学、环境科学)。总的来说,我们排除了520项结果,剩下的178项都是用英语写的,并在1990年以后发表在期刊或学术会议上。
为了提取辅助策略和相应的验证的类型学,178篇论文最初的分类根据其主要议题, 进一步分离基于多关节外骨骼,臀部外骨骼,膝盖和脚踝的脚矫正法的外骨骼。
控制策略: 论文主要强调控制算法。属于这一组的论文构成了主流文献,使我们能够确定不同的辅助策略范式。通常,这些论文针对的是一种分布式控制策略(例如灵敏度放大,而不是基于模糊逻辑的控制算法)和给定设备的简单实现。
系统概述: 论文介绍矫形器的结构和功能,如机械结构、传感器和控制系统。之前的每一篇控制策略论文都允许我们识别一个由特定外骨骼利用的辅助策略:简要调查正在构建的同伴外骨骼是如何被要求捕捉辅助策略的关键点的。
与用户的验证: 论文特别提出和分析的实验进行了一个人穿着外骨骼。分析这些论文对于评估辅助策略对用户的影响是必要的。
其他类型的验证: 关于外骨骼的机械设计或感受器及其相关特征的论文,但没有涉及到人在回路中的实验。这些论文没有直接的利害关系,除非它们提供了有关外骨骼研究的唯一专家报告。
综述论文: 关于动力下肢辅助外骨骼和矫形器的综述。
为了保留有关辅助策略的最新更新或提供更明确信息的引文,我们进一步细化了参考书目集:在使用相同的机器人和/或类似的实验验证(通常是会议进程文章及其期刊扩展版)提出类似策略的论文中,我们只考虑了相关的工作,只保留了技术成熟程度较高的外骨骼描述性论文。最后,我们保留了76个paper来解决可穿戴机器人设备的辅助策略以及相关的验证实验。
本文综述了涉及多关节或单关节系统的辅助策略(第3和4节): 值得一提的是,这份报告框架并不严格指外骨骼的设计机械结构(通常采用以前的审查工作),而是指定有多少下肢关节考虑为了实现辅助策略(因此面临他们的协同效应的力量和/或运动)。在第3节中,在多关节机器人系统中,识别了7种辅助策略范式,并在第3.1节3.7中进行了报告。第四部分进一步区分了单关节外骨骼在髋关节、膝关节和踝关节矫形器中的应用,并分别对这三类矫形器的辅助策略进行了研究。
多关节外骨骼
多关节外骨骼已经被开发出来用于各种用途,比如为健康的年轻人和老年人提供额外的运动能量,提高士兵或重体力劳动者的负重能力,帮助截瘫或下肢受损的患者恢复独立的活动能力。根据所覆盖的关节,这里的多关节外骨骼分别来自于躯干髋关节踝足(THKAF)、髋关节踝足(HKAF)、躯干髋关节(THK)、髋关节膝关节(HK)或膝关节踝足(KAF)矫形器和外骨骼,如图所示。1. 图2和图3展示了一些多关节外骨骼。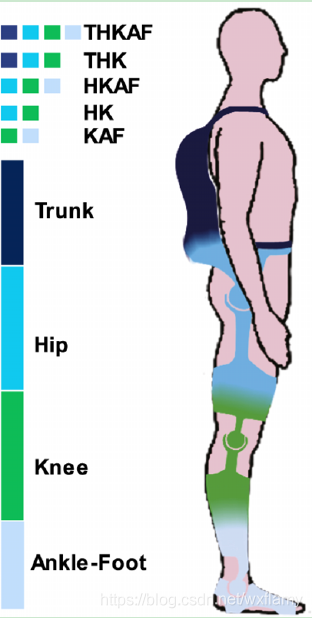
![BLEEX [27] (© 2006 IEEE, with permission from IEEE), ATLAS [28] (© 2012 IEEE, with permission from IEEE), HAL [12] (© 2010 Springer, with permission fromSpringer), Mina [34] (© 2011 IEEE, with permission from IEEE), MINDWALKER [35] (© 2013 IEEE, with permission from IEEE), ReWalkTM[39] (© 2013 IEEE, with permissionfrom IEEE), eLEGs [8] (© 2011 IEEE, with permission from IEEE), Vanderbilt lower-limb orthosis [41] (© 2011 IEEE, with permission from IEEE).](https://www.guyuehome.com/Uploads/Editor/202108/20190618090143166.png)
![ABLE [45] (© 2006 IEEE, with permission from IEEE), Nurse Robot Suit [49] (© 2004 IEEE, with permission from IEEE), WWH [51] (© 2005 IEEE, with permission fromIEEE), Lower-limb exoskeleton by N. Tagliamonte et al. [59] (© 2013 IEEE, with permission from IEEE), EXPOS [66] (© 2006 IEEE, with permission from IEEE), Power assistwear by D. Sasaki [68] (© 2013 IEEE, with permission from IEEE), Soft Exosuit [69] (© 2013 IEEE, with permission from IEEE), MIT Exoskeleton [11] (© 2007 World Scientific,with permission from World Scientific).](https://www.guyuehome.com/Uploads/Editor/202108/20190618090302609.png)
在接下来的3.1 . 3.7节中,我们将提出七个辅助策略,在这些策略中,我们已经从分析的文献中配置了机器人的服务。灵敏度放大控制(3.1节)更适用于THKAF外骨骼,以增强穿戴者的负重能力。预定义的步态轨迹控制(第3.2节)更容易实现,但强制用户以可能不自然的参考步态行走。基于模型的控制(3.3节)在各种应用中都很流行,但是它需要对耦合的人/外骨骼动态系统进行精确的建模。基于自适应振荡器和模糊控制器(章节3.4和3.5)分别基于步态模式的骚乱程度(由此推断出肢体未来的姿势)和预先设定的模糊逻辑层,代表了递归跟随用户预期动作的自适应模型。在一个基于步态模式的预定义(章节3.6)的控制框架中,利用再电流步态相变来调节控制器的动作,实现了灵活的交互。为了识别具有两种或两种以上控制方法的有效机器人控制,研究了混合辅助策略(第3.7节)。
灵敏度放大控制
灵敏度放大主要用于处理外骨骼,增加用户的承载能力。在该策略中,控制器通常依赖于外骨骼的逆动态模型;佩戴者施加在外骨骼上的力设置在控制装置的正反馈回路上,可以通过放大参数[25]来减小。因此,该控制器不同于传统的基于模型的控制器,它直接计算所需的关节位置或扭矩。当外骨骼能够准确地跟踪穿戴者的运动时,使用者施加的力将接近于零。然而,该控制器也可以放大外部干扰力,使系统变得不可稳定。在发生失稳的情况下,用户必须迅速移动自己,以创建整个系统[26]新的稳定状态。此外,该辅助策略要求逆动态模型具有较高的精度。
伯克利下肢外骨骼(BLEEX)
BLEEX是第一个负载和精力自主外骨骼[27]。采用拟人的设计,BLEEX拥有左右三段腿,类似于人类的大腿、小腿和脚。每条腿都有7个自由度(DOFs):髋关节屈曲/伸展(f/e)和外展/内收(a/a),膝关节f/e和踝关节背侧/足底屈曲(d/p)是主动的,而其他的(髋关节内/额外旋转,踝关节反转/外翻和a)配备被动机械阻抗(金属或弹性弹簧)。
文献[25]提出了一种基于灵敏度放大控制器的BLEEX辅助策略。在本研究中,我们根据步态的三个阶段分别建立了BLEEX在矢状面内的动力学模型:单支撑阶段的全7自由度串联机构;两种三自由度串联连杆机构,其中一种连接自由度沿其最上端连接,用于双支撑阶段;一种用于支撑端口的三自由度串联机构和一种用于延迟阶段冗余腿的四自由度串联机构。步态阶段由足内底传感器来区分。在这种控制策略下,穿着BLEEX的用户可以以1.3米/秒的平均速度行走,同时负载34公斤。
近年来,军用增强外骨骼得到了蓬勃发展,并已达到或接近市场应用,例如,Sarcos-Raytheon XoS se-ries(雷声公司,美国,www.raytheon.com)和Human UniversalLoad Carrier (HULC)(洛克希德·马丁公司,美国,www.lockheedmartin.com)。然而,它们只能在没有公共科研成果的媒体平台上使用。由于这些器件在结构上类似于BLEEX,因此灵敏度放大控制也被认为适用于这些器件。
海军航空工程学院外骨骼套装(NAEIES)
NAEIES[29]是为帮助用户在不同的地形上搬运重物而开发的。每条腿有6个自由度:臀部f/e和a/a,膝盖f/e,以及所有三个脚踝自由度。其控制策略不依赖于非常精确的外骨骼逆动力学模型,而是接受人机界面力的非零稳态值,并通过神经网络[29]对其进行补偿。在他们的工作中,人机交互力是由多轴力/扭矩传感器测量的。
虽然神经网络补偿能力的有效性通过对1自由度和2自由度系统的仿真得到了验证,但是在实际应用之前,由于计算成本和额外的传感器而造成的限制需要仔细权衡,这是NAEIES研究人员所没有面临的。
预定步态轨迹控制
在一个预定义的步态轨迹控制机制下,所需要的关节轨迹是预先从一个健康的人身上录制下来的,或从步态分析数据图谱中推断出来的,然后在外骨骼上重新播放。为了提高控制器的可用性和灵活性,通常根据不同的姿态参数化所期望的关节轨迹。在我们研究的文献中, 这种援助的主要目标对象部分/全部失去正常的主动活动,例如阿特拉斯ATLAS(3.2.1)旨在四肢瘫痪的孩子,HAL(3.2.2)可以用于由步态紊乱患者, ReWalk (3.2.6), e-LEGS(3.2.7)和范德比尔特下肢外骨骼Vanderbilt Lower-Limb Exoskeleton(3.2.8)适合SCI患者。为了证明概念,一些用于截瘫患者的其他机器人设备,如IHMC Exoskeleton (3.2.3), MINDWALKER(3.2.4),池原T.等人设计的行走辅助设备(3.2.5),也给出了健康受试者的验证结果。
ATLAS
阿特拉斯项目的目的是部署一个主动的矫形器步态援助,特别是在患有四肢瘫痪的儿童[30]。ATLAS exoskeleton的第一个原型为髋关节和膝关节提供了主动运动f/e,通过连接大腿和小腿之间的连杆,踝关节f/e处于欠驱动状态。考虑到目标终端用户,ATLAS的目标是成为一个完全自主的辅助矫形器,佩戴者只给运动的机动触发器,如启动和停止,站起来和坐下。
在[30]中,ATLAS使用两台有限状态机分别调整健康儿童的髋关节和膝关节轨迹。在站立阶段,臀部遵循一个参数化的倒立摆轨迹,其中的高度和跨栏配置符合受试者的物理特征。在早期的挥杆过程中,髋关节和膝关节要承受恒定的扭矩,直到每个肢体达到预设的速度。在摆动的中间,臀部和膝盖自由地运动,几乎不需要扭矩。在摆动阶段结束时,一个位置控制器被用来使关节达到所需的姿态在脚跟打击。在另一项工作[6]中,摆腿轨迹遵循参数化摆模型。利用高斯函数滤波器对姿态相位和摆动相位之间的过渡轨迹进行平滑处理。
在上面引用的两篇作品中,并没有对所涉及的实验验证进行详细的描述,但是[6]中提到的视频显示了两个四肢瘫痪的儿童在ATLAS中成功移动。
混合辅助肢体(HAL)
HAL的开发是为了在身体上增强健康人的关节力量,或帮助步态障碍患者以健康人的身份移动和执行日常生活活动。已经开发出不同类型的HAL: HKAF矫形器、全身矫形器和单腿矫形器。所有类型都能在矢状面提供运动辅助,即f/e和d/p DOFs。当HAL的目标是用于帮助有行走困难的人时,一个自主控制器被用来帮助髋关节和膝关节,而踝关节被动地使用一个弹簧[12]。HAL的髋关节和膝关节的控制基于两个步态阶段:摆动阶段和支撑阶段。所需要的关节模式是预先记录从一个健康的对象,并分配给这两个阶段的实时意图估计(了解用户开始步行,停止步行,腿部摆动),其中计算地板反应力和躯干角[31]。
该辅助策略在两名受试者身上得到验证:一名受试者患有下肢感觉麻痹,另一名受试者健康,但模拟同时患有感觉麻痹和运动麻痹。仅对运动结果进行了分析,验证了整个系统的可行性以及意图估计器[31]的可靠性。
IHMC移动辅助外骨骼和Mina
在[32]中展示的IHMC移动辅助外骨骼在髋a/a、f/e和膝关节f/e上有三个驱动dof,在髋旋转和踝关节d/p上有两个被动dof。由于IHMC外骨骼采用了拟人设计和一系列弹性执行器(SEA)[33],因此可以在不同的模式下工作,如零辅助模式、性能增强模式和步态康复模式。首先,它的主要目标是成功地使下肢瘫痪的人能够沿着直线行走15英尺。因为在直线行走时髋关节a/a没有要求,所以用一个刚性链接替换了髋关节。从健康人群的步态出发,采用IHMC零辅助模式,建立了髋关节和膝关节的关节运动轨迹f/e。当轨迹在实时练习中回放时,佩戴者必须与外骨骼进行动态协作:通过调整躯干位置来卸下即将到来的摆动腿。
四个身体健全的用户测试了IHMC,其中一个记录了步态模式[32]。在实验中,他们被要求完全放松腿部肌肉。他们都能以全轨迹回放的速度走一小段路,但他们需要拐杖来保持平衡。
Mina是IHMC外骨骼[34]的第二个版本,只有两个驱动自由度: hip f/e和knee f/e,以及一个更紧凑的机电一体化架构。它的目的是为截瘫或瘫痪患者提供行动援助。它的控制方法类似于早期的IHMC版本,通过回放预先录制的关节轨迹来移动用户的腿。佩戴Mina可以触发单步或连续步,也可以增加或减少行走速度。为了帮助用户熟悉Mina,还可以调整步骤转换持续时间。两名SCI受试者评估Mina:在不同的训练阶段后,他们都能够使用前臂拐杖以0.20米/秒的速度行走。这对他们的认知能力要求很低,因为他们可以在穿着Mina的时候保持眼神交流和交谈。
MINDWALKER
MINDWALKER是一种动力THKAF外骨骼,专为截瘫患者设计,以恢复运动能力[35]。它每条腿有5个自由度的坐位,髋部f/e和a/a及膝关节f/e由sea提供动力,髋部旋转和踝关节d/p被动地承受一定的刚度。
池原等人设计的行走辅助装置。[37]
[37]中描述的THKAF步行辅助装置旨在帮助老年人和残疾人。其驱动系统放置在背包中,传动采用柔性轴:根据轴的扭角计算有效作用于活动关节膝关节和踝关节的扭矩。设计的关节角和扭矩是参考健康人的步态数据。通过将关节角度控制器和扭矩控制器按一定比例混合(实验选择)来确定执行器的最终输出,而不是只跟踪一种需要的信号,只跟踪角度或扭矩。
ReWalk
ReWalk是一种动力外骨骼,用于帮助胸段完全SCI患者独立行走7。它的髋关节和膝关节是动力和控制,以遵循预定的轨迹。通过wrist-pad控制器,用户可以激活机器人系统执行站立、坐下或开始行走; 通过躯干倾斜传感器,用户可以触发一步一步的过渡过程中步行。
对12例慢性运动完全性颈胸SCI患者进行了使用ReWalk[39]的训练。经过8周的练习,所有的受试者都能在没有任何其他人类辅助的情况下,拄着拐杖独立行走至少50米,持续至少5 - 10分钟,速度从0.03米/秒到0.45米/秒不等。他们的步态基本上是对称的。
eLEGS
THKAF外骨骼(e LEGS)是用来支持下肢有坐、走和站立功能障碍的患者的。它的臀部和膝盖f/e是由弹簧驱动的,而ankled/p是由弹簧被动驱动的。使用有限状态机来确定两个外骨骼腿的运动。在步行过程中,一个步幅周期分为四种状态:左摆、左双站、右摆和右双站。摇摆姿势的转换主要由使用者移动拐杖和移动身体重量来触发;摆台过渡主要由鞋跟撞击检测触发。在坐立机动中,两条机器人腿以同样的轨迹对称地运动:尽管每条腿是分开控制的。THKAF外骨骼(e LEGS)是用来支持下肢有坐、走功能障碍的患者的.
五个不同SCI水平和完整性测试委托的受试者都能够快速学习使用该机器来部署一致的节奏8。
范德比尔特下肢外骨骼Vanderbilt Lower-Limb Exoskeleton
范德比尔特香港矫形器是专为协助髋关节和膝关节的脊髓损伤个人[40]。范德比尔特矫形器可以安装标准的AFO,以帮助用户在站立阶段保持踝关节稳定,避免在挥杆阶段跌倒。出于安全考虑,膝关节安装了正常制动装置,以防断电。矫形器由四种运动状态组成:站立、右向前、左向前、坐[41]。在每一种状态下,关节角度都是预先编程的,其依据是从佩戴矫形器的健康受试者那里记录下来的轨迹。状态之间的切换由用户的声音命令发起。
本辅助策略是在完全脊髓损伤(SCI)截瘫患者在扶手行走时进行的实验研究。受试者平均步行速度为0.8 km/h,运动学结果分析表明髋关节和膝关节轨迹的步进重复度较高。
在一个楼梯攀登应用程序[42]中,矫形器运动被分成两个序列,以预先定义的方式一个接一个地抬起两条腿。每个序列都是根据压力中心(CoP)的位置触发的。与楼梯上升不同,楼梯下降过程只需要初始CoP触发器。在相关的验证实验中,一名T10完全损伤的截瘫患者在处理外部支撑的情况下成功地上下了标准楼梯。
基于模型的控制
在基于模型的控制结构下,通常考虑重力补偿、零力矩点(ZMP)平衡准则,并提供额外的指令辅助,根据人体外骨骼模型计算所需的机器人动作。该控制策略虽然直接,但依赖于模型的精度,需要一系列的传感器来识别运动学和动力学变量。以下报道的机器人设备用于不同的目的,例如HAL(3.3.1)和ABLE(3.3.2)目标是协助截瘫患者的日常生活活动;BE(3.3.3)和Nurse Robot Suit(3.3.4)可以增强佩戴者的扶杖能力;wh(3.3.5)、WPAL(3.3.6)、xor(3.3.7)主要适用于肌无力人群。
基于振荡器的自适应控制
为了与任何周期输入信号的瞬时频率和相位同步,Righetti等人首先提出了一种自适应频率振荡器学习机制。该模型已广泛应用于机器人领域,例如,作为一个中心模式生成器[56]。Ronsse等人将这一概念扩展到可穿戴机器人的研究中,目的是捕捉周期性的运动相关信号特征(即阶段,频率,幅度,偏移)在步行或循环康复训练中。除了自适应频率振荡器,传统的神经振荡器在同步和抑制性能方面也有一些应用。近年来,基于自适应振荡器的控制得到了越来越多的关注,然而,在我们的文献综述中发现,它的应用仅限于能够传递周期性和稳定的运动相关信号的受试者,且大多在髋关节驱动上得到验证(参考4.1.1,髋关节外骨骼)。
模糊控制
当难以构造精确的动态模型时,可以考虑模糊控制,以表示和实现关于如何处理物理系统的直观知识[63]。模糊控制器由四个主要模块组成:解释输入的模糊化模块;掌握控制系统知识的模糊规则模块;选择应该实现哪条规则的接口机制;以及将模糊结果转化为期望输出信号的去模糊化块。然而,模糊控制器需要根据特定的运动任务和个体手动调整许多变量[64]。
在本研究中,只有两种设备专门针对这种控制方法,一种是H. He等人(3.5.1)的下肢运动辅助外骨骼,旨在帮助身体虚弱的人,另一种isEXPOS(3.5.2)旨在帮助老年人完成地面行走任务。
基于步态模式的预定义动作
有一些外骨骼提供的辅助基于被动弹簧或气动气缸系统的物理阻抗和顺应性控制,只有通过激活和/或注册这些元素。与预先定义的轨迹控制(3.2节)不同的是,该辅助策略控制设备与预期的步态事件同步;例如G. Belforte设计的气动执行器开/关开关气动主动步态矫形器(3.6.1)和D. Sasaki设计的inPower assist wear(3.6.2)、软系外航天服中可弯曲的Bowdencable位置(3.6.3)以及mit外骨骼中的阻尼机构开/关(3.6.4)。这些装置所需要的辅助不仅取决于控制指令的传递时间,而且还取决于弹性元件(刚度、惯性、阻尼)的特性。
混合辅助策略
混合辅助策略的目的是通过应用不同的辅助策略来控制外骨骼:BLEEX(3.7.1)在摆动阶段采用力控制器,在位置控制器实例阶段采用位置控制器;叶(T. Yeh)等人(3.7.2)的气动肌肉矫形器在姿态阶段使用基于模型的控制器,在摆动阶段使用预定义的轨迹控制器;AIT腿部exoskelon - i(3.7.3)首先离线预定义步态轨迹,然后利用模糊控制器在线调整轨迹。对于特定的gaitstate,可以提高援助的效果。但是,应考虑到每一项战略之间的过渡,以避免产出不连续或不平衡。
单一关节外骨骼
……


评论(0)
您还未登录,请登录后发表或查看评论