

人形机器人比马斯克想象的要困难得多
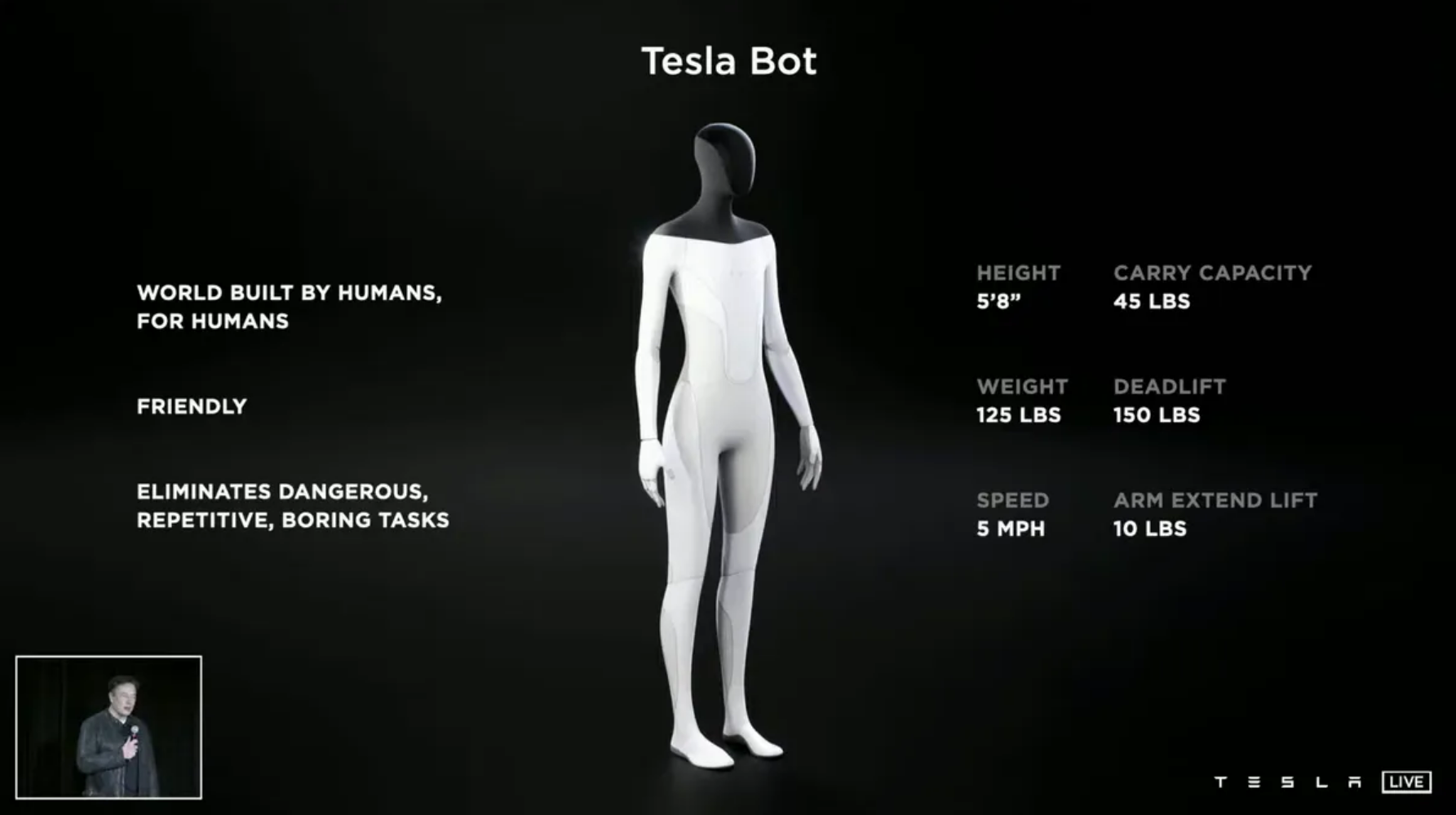
几天前,在特斯拉人工智能日结束时,埃隆马斯克介绍了“特斯拉机器人”的概念,这是一个 125 磅重、5'8 英寸高的机电驱动自主双足“通用”人形机器人。“概念”是指马斯克展示了一些插图并谈到了他对机器人的看法,这让我觉得,有点天真。根据六分钟长的演示内容,似乎马斯克认为应该有人(特斯拉,突然?)已经开始制造一个自主的人形机器人——就好像这项技术已经存在了,为什么不去做呢(何不食肉糜)?
有一说一,马斯克确实或多或少地为电动汽车和可重复使用的火箭做了不少事情。但人形机器人和它们完全不相同,而且要复杂得多。对于火箭,嗯,这是现成的东西。对于电动汽车,我们也已经有了汽车、电池、传感器和DARPA 竞赛。我这样说并不是要尽量减少马斯克对 SpaceX 和特斯拉所做的贡献,而是强调人形机器人是一个非常不同的挑战。
与火箭或汽车不同,人形机器人不是一项现成得技术,需要宏伟的愿景、聪明的团队和持续的财务投资。对于人形机器人,有更多更难的问题需要解决,我们离实际解决方案还很远。几十年来,许多非常聪明的人一直在积投身于这些技术的研发,而且在硬件,尤其是软件方面,有了很多基本突破,这些突破可能是实现马斯克愿景所必需的。
这些根本性突破对特斯拉来说是不可能的吗?不是不可能,但听了埃隆·马斯克今天说的话,我认为他不知道让人形机器人发挥作用会涉及什么技术与难题。让我们谈谈为什么。
如果你还没有观看演示,请先观看,然后让我们来看看马斯克所说的内容。
好的,我们开始分析(吐槽)!
“我们的汽车是带轮子的半感知机器人”
我甚至不知道这意味着什么。半感知?当然,无论如何,我猜蟑螂是半感知的,尽管这话暗示了机器人实现完全感知的荒谬。此外,自动驾驶汽车在半受限环境中生活在高度受限的行动空间中,尤其是特斯拉汽车在自主性方面存在许多众所周知的问题。
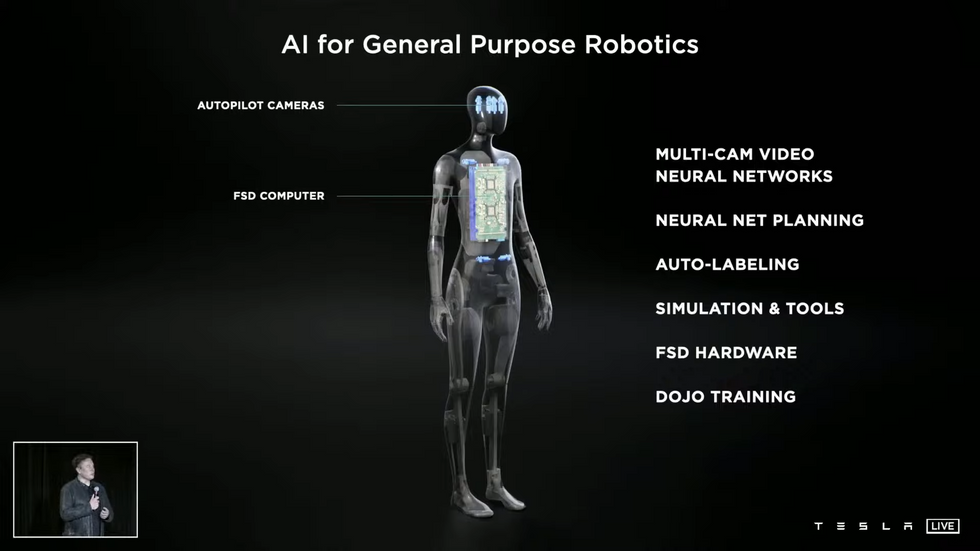
有了完全的自动驾驶计算机,基本上是汽车上的推理引擎(显然我们将继续发展)和 Dojo,以及所有识别世界的神经网络,了解如何在世界中导航,这有点有意义把它放在一个人形上。
“有了完全自动驾驶的计算机,本质上是汽车上的推理引擎(很明显,我们会继续进化)和Dojo,以及所有认识世界的神经网络(了解如何在世界中导航),把这些放到人形机器人上是有意义的。”
是的,因为它就是这么运作的。你看,特斯拉汽车里的神经网络被训练成从汽车的角度来识别世界。他们寻找汽车需要理解的东西,而他们对其他东西完全不了解,这可能会给汽车带来各种问题。导航也是如此:自动驾驶汽车在一个由道路和道路相关的东西组成的世界中导航。你不能只是把这些东西放在人形机器人身上然后指望它会有用,除非你想让它做的只是走在街道中间,遵守交通规则。
“(特斯拉)在传感器、电池和驱动器方面也相当出色。所以,我们认为我们可能会在明年的某个时候有一个原型。”
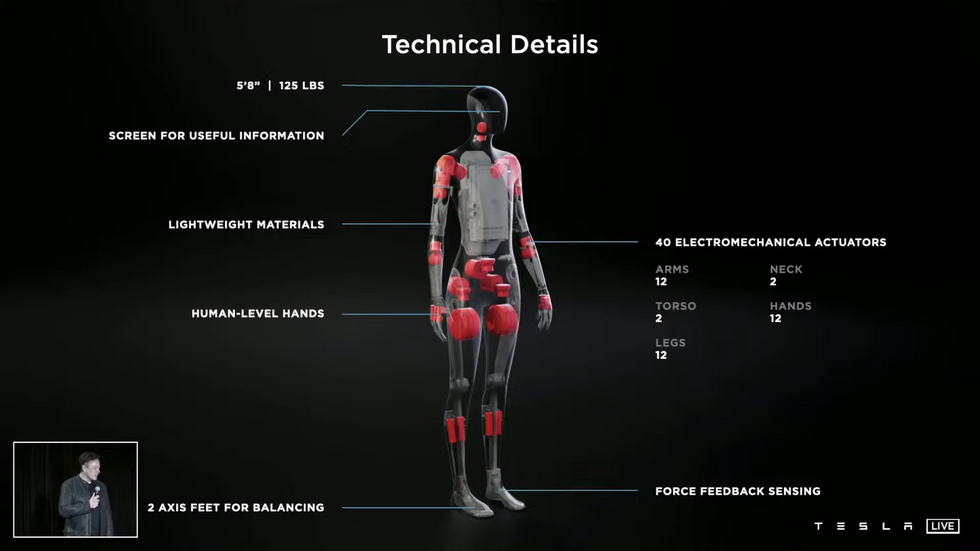
只要投入足够的资金,特斯拉就有可能制造出一个配备电池、驱动器和电脑的人形机器人,其设计与马斯克描述的类似。特斯拉能像马斯克说的那样在明年实现吗?当然可以,为什么不行呢?但困难的部分不是制造一个机器人,而是让机器人做有用的事情,我认为在这方面超出了马斯克的能力范围。没有很多机器人经验的人似乎认为一旦造出了机器人,你就解决了大部分问题,所以他们关注的是机械方面的东西,比如驱动器和它的外观。
埃隆马斯克不知道他在用特斯拉机器人做什么
人形机器人比马斯克想象的要困难得多
“人类级别的手”到底是什么意思?
“它的目的在于为人类建造的世界中导航。。。”
这是少数几个制造人形机器人的好理由之一,我甚至不确定它本身是否足够好。但无论如何,这个词在这里做了很多繁重的工作。为人类建造的世界包含了几乎无限多种不同的环境,充满了各种对机器人不友好的东西,更不用说对于一个天生不稳定的125磅机器人的安全了。
我觉得我已经很好地掌握了人形机器人的最新技术,如果你经常访问这个网站,你可能也会这样。像波士顿动力公司和敏捷机器人公司这样的公司几十年来一直在研究能够在人类环境中导航的机器人,但这仍然是一个超级困难的问题。我不知道为什么马斯克认为他可以突然做得更好。
对于任何想知道我为什么发推文的人来说“伊隆马斯克不知道实际上是什么让类人机器人做有用的事情...... https://t.co/5uei4LIpyF
— Evan Ackerman (@Evan Ackerman)1629446537.0
你在马斯克的上述演讲中看到的 “人类水平的手 ”是一个很好的例子,说明我认为马斯克并没有真正掌握这个机器人要做多少工作。“人类水平的手 ”到底是什么意思?如果我们谈论的是具有与人类相当的感知和灵活性的五指手,这些手确实存在(有点),尽管它们通常很脆弱,而且很昂贵。仅仅从硬件的角度来看,要把这样的手变成实用的东西需要巨大的工程努力,这就是为什么没有人去做--大多数机器人使用更简单、更坚固的两三个手指的抓手来代替。特斯拉能解决这个问题吗?我毫不怀疑他们可以,只要有足够的时间和资金。但他们也有机器人的其他部分需要处理。而且,即使你能使硬件足够强大,可以发挥作用,你仍然要想出所有的软件来使它工作。同样,我们谈论的是问题的重中之重,其规模似乎是马斯克没有考虑的。
“......并消除危险、重复和无聊的任务。”
太好了。这就是机器人应该做的。但正如马斯克自己所知,说机器人将消除危险、重复和枯燥的任务很容易,但要让机器人去做就困难得多,不是因为机器人没有能力,而是因为人类有能力得多。我们为性能和多功能性设定了很高的标准,但这些标准并不总是显而易见的,即使这些标准很明显,机器人也可能无法有效地复制它们。
[马斯克开玩笑说机器人会流氓。]
额,Okay吧。
“我认为一个真正有用的类人机器人的困难之处在于,它能否在没有经过明确训练的情况下,在没有明确的逐行指令的情况下,在世界中导航。你能否跟它说,’请拿起那个螺栓,用那个扳手把它固定在汽车上’’请去商店给我买些杂货’之类的东西。”
机器人已经可以在没有明确的逐行指令的情况下在世界中导航,只要它们对世界的组成有一个相对好的概念。如果这个世界是道路,或者是我的公寓,或者是这个特定的购物中心,这可能是一个95%以上已经解决的问题,记住最后5%会变得非常复杂。但如果你开始谈论我的公寓,加上附近的杂货店,以及我的公寓和杂货店之间的所有东西,这整个空间不一定结构良好或可预测。
挑战的一部分就是身体在这些空间里移动。有楼梯吗?沉重的门?人行横道?进入一个拥挤的杂货店,从货架上取下东西,把它们放进篮子或购物车,然后必须安全地推下去,这些都是前沿未解决的机器人问题。我们几乎没有看到这种事情发生在轮式底座上的工业臂上,即使在研究环境中也是如此。唉,如果不是专门为该任务设计的,即使“捡起那个螺栓”对于机器人来说现在也不是一件容易的事。
“我认为这将是意义深远的,因为什么是经济的基础,是劳动。所以,当劳动力不短缺时,会发生什么呢?这就是为什么我认为从长期来看,将需要全民达到基本收入。但不是现在,因为这个机器人不工作。”
经济学远远超出了我的专业领域,但正如马斯克所说,在机器人工作之前,这一切都没有实际意义。
“通用机器人的AI。”当然。
正如马斯克所说,特斯拉很有可能在明年某个时候制造出某种特斯拉机器人。我认为它看起来不太像这个演示中的概念图。我想它能站起来,也许还能走路。也许能承受一两次撞击,做一些基本的物体识别和抓取。我认为在那之后,进展将会缓慢。我不认为特斯拉能赶上波士顿动力或敏捷机器人。也许他们最终会拥有类似于Asimo的PR工具,即能够提供令人印象深刻的演示,但最终并不是那么有用。
这一切让我感到不安的部分原因是,马斯克对特斯拉机器人的设想意味着他将随随便便地跨越所有机器人专家,这些人几十年来一直在为有用的人形机器人而努力。马斯克假设,他将能够涉足人形机器人的开发,并做其他任何人都无法做到的事情:建造一个有用的通用人形机器人。我怀疑马斯克是否有意这样做,但我觉得他是在反过来暗示,人形机器人的挑战实际上并不难,如果其他人更聪明,或更努力,或在这个问题上投入更多资金,那么我们就已经有了通用的人形机器人。
我认为他错了。但如果特斯拉最终投入时间和金钱来解决一些真正困难的机器人问题,也许他们会取得一些成功,推动整个领域向前发展。我认为这是一场胜利。


评论(0)
您还未登录,请登录后发表或查看评论