

*课程资料请到微信公众号“古月居”后台回复“机器学习资料”获取
该课程已开通专门交流答疑区,点击这里,发帖提问交流
课程目的
近年来,强化学习得到了极大的发展,也出现了许多强化学习的仿真工具包,每个工具包都有各自的特色。那么对于机器人领域的初学者来说,我们该选择哪个包来入门强化学习呢?
如果你有以下需求,那么本课程就是一个比较好的选择。
1、你想结合强化学习与机器人的仿真,仿真平台要支持Python、C/C++等主流编程语言;
2、你想要学习一个成熟的主流强化学习框架,可以应用到许多领域;
3、你想要快速构建自己的机器人仿真模型,希望仿真平台的可视化程度比较高,尤其是仿真过程中机器人的动作可视化和数据可视化;
4、你想要使用已有的最新强化学习算法控制自己的模型,最好是有现成的算法实现,而且算法开源,便于自己修改;
CoppeliaSim作为机器人仿真平台的其中一个,已经比较成熟了。主页:https://www.coppeliarobotics.com/ ,可以在Windows、 Linux、 MacOS三大平台使用,内置许多现有的机器人模型,支持C/C++、Python、Java、Lua、Matlab/Octave等主流编程语言,接口简单易用。
本课程将基于CoppeliaSim构建自己的仿真模型,并使用强化学习框架Gym和强化学习算法库Stable-baselines3实现一个强化学习案例。
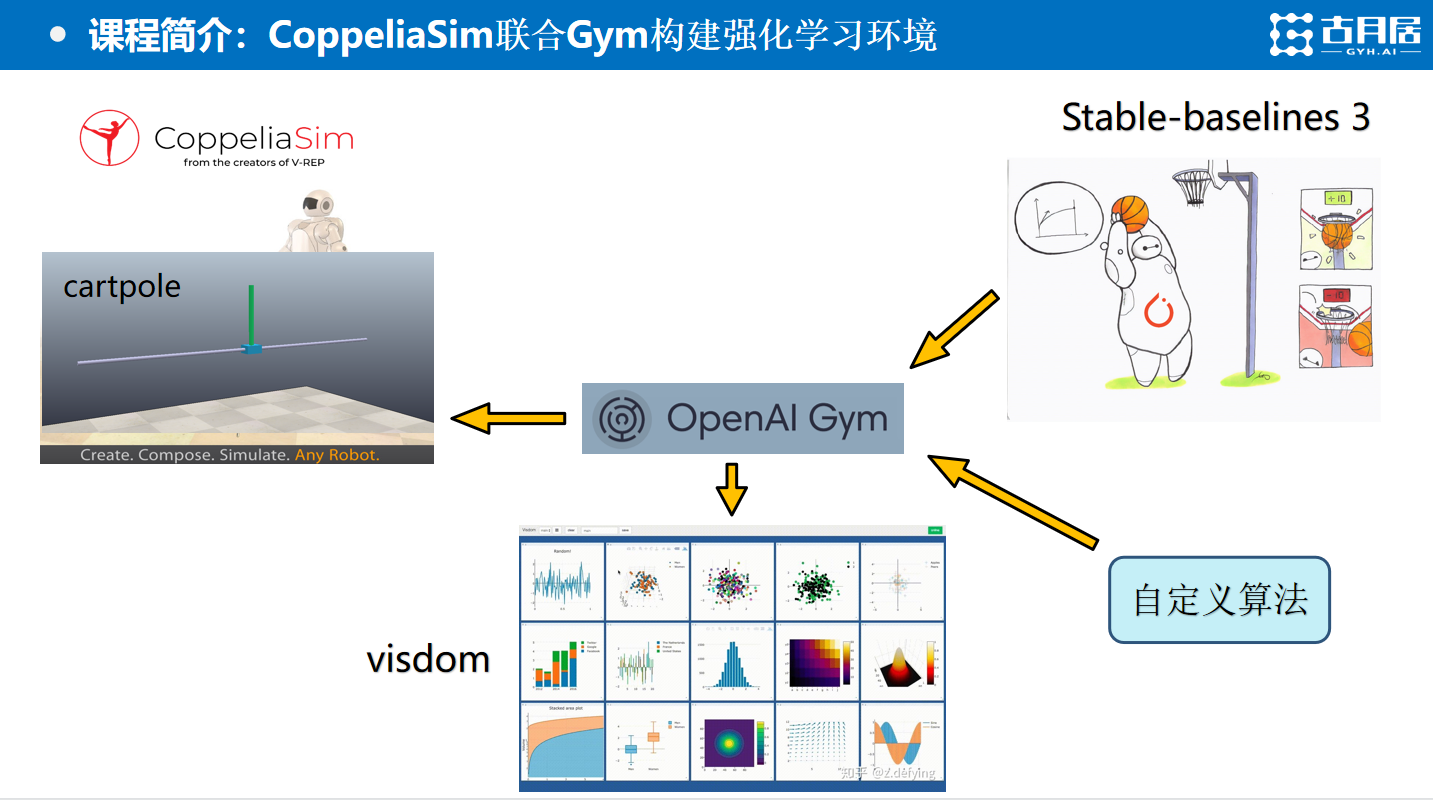
最终,本课程提供的案例可以实现对CartPole模型的控制,实验效果:
当然,基于本课程构建的框架,你可以很方便地实现自己的强化学习环境和仿真模型的控制过程。
课程内容
- 课程简介
- CoppeliaSim的安装与使用
- 强化学习与Gym简介
- 强化学习环境与模型搭建
- 课程总结
*课程资料请在微信公众号“古月居”后台回复“机器学习资料”获取
温馨提示
1.本课程为强化学习环境搭建的入门教程,适合想要自己构建机器人仿真模型和强化学习环境的初学者;
2. 本课程包含了CoppeliaSim软件的安装和使用教程,提供了几个案例,适合对CoppeliaSim不太熟悉的同学;
3. 本课程使用了最新的强化学习算法,适合想要快速验证效果的同学,同时,本课程的灵活框架也适用于自定义算法,同学可在现有算法的基础上进行改进;
*课程资料请在微信公众号“古月居”后台回复“机器学习资料”获取
温馨提示
1.本课程为强化学习环境搭建的入门教程,适合想要自己构建机器人仿真模型和强化学习环境的初学者;
2. 本课程包含了CoppeliaSim软件的安装和使用教程,提供了几个案例,适合对CoppeliaSim不太熟悉的同学;
3. 本课程使用了最新的强化学习算法,适合想要快速验证效果的同学,同时,本课程的灵活框架也适用于自定义算法,同学可在现有算法的基础上进行改进;
最终,本课程提供的案例可以实现对CartPole模型的控制,实验效果:



评论(0)
您还未登录,请登录后发表或查看评论