

Summary
根轨迹,顾名思义,是方程的根随参数变化形成的轨迹。这里的方程是控制系统的特征方程,特征方程的根也即闭环传递函数的极点;参数可以是控制参数,如增益k,也可以是系统的某个参数。
根轨迹和“劳斯判据(link)”类似,通过判断特征方程根(传递函数极点)的正负,来判断稳定性。并且,由于精确表示出了根,通过根轨迹能直观看出参数变化对系统闭环极点分布的影响,从而辅助控制器设计。
增益根轨迹
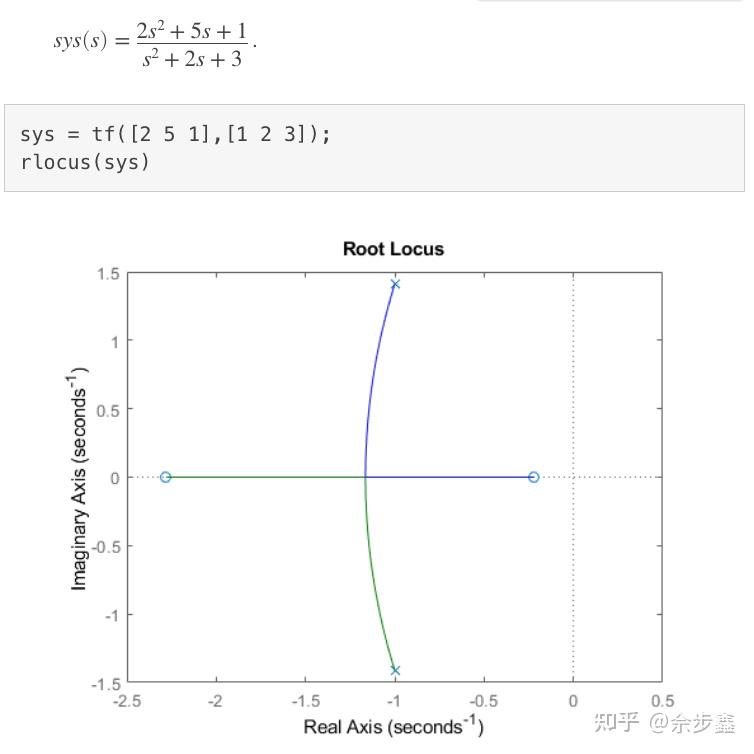
课本上常见的根轨迹具体来说是增益根轨迹,因为绘制出的曲线是根随着控制器增益k变化形成的轨迹。借助Matlab的 “rlocus”语句,可以方便地画出增益根轨迹
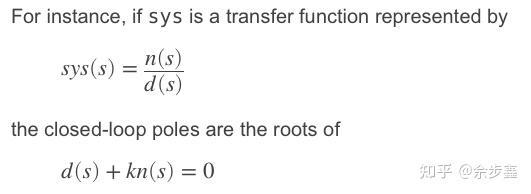
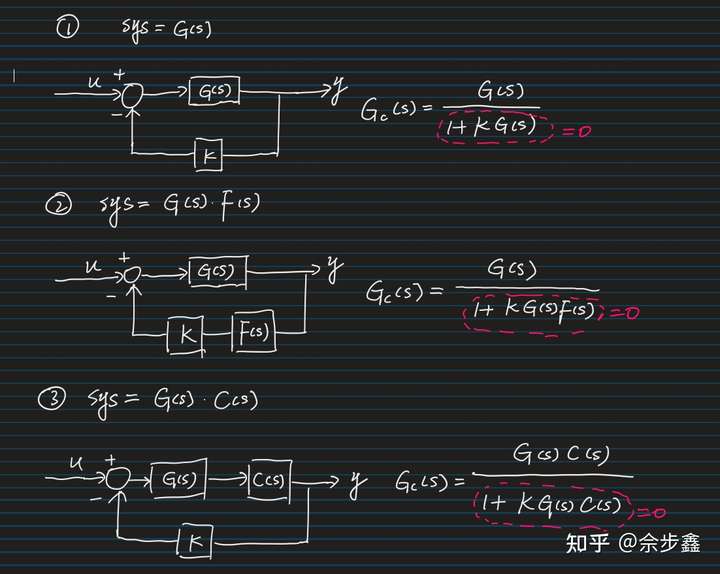
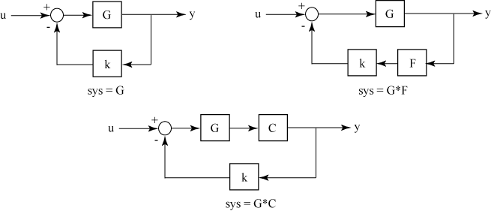
需要指出,matalb绘制的是增益根轨迹,默认输入sys(s)是系统的开环传递函数G(s)H(s)。对于下图所示的负反馈系统,写出闭环传函,令分母等于0,就能得到特征方程的根,即图一中的第二个等式。
一个例子:
基于以上分析,如果想绘制增益以外其它参数的根轨迹,需要进行一定的变换,不能直接套用上面的代码。使用“rlocus”语句,需要将想观测变化的参数看成增益,剩余部分等效转化成 上图的sys(s)。最终转换是否正确,就看原有系统的特征方程等否写成图二的第二个等式。更详细内容可参考matlab官方文档:
一些细节问题
1.为什么课本介绍根轨迹会涉及开环传递函数,以及绍幅值条件和相角条件?
根轨迹最终的落脚点是闭环传递函数的极点,对于负反馈系统,闭环传递函数的极点可以借助开环传递函数的零点确定(参见图二中红色虚线圈出部分和图一的第二个等式),一个虚数方程对应两个实数方程,演变成幅值条件和相角条件。这样,就能避免反复求解闭环传函,加快曲线绘制速度。
2. 怎样手绘根轨迹?
手绘根轨迹需要依据值条件、相角条件,以及基于它们推导的准则来绘制,实际中已很少使用。推荐一个讲根轨迹细节很赞的知乎文章,本文很多没有涉及的细节可以在里面找到。

目录:
开篇 : 学习自动控制原理(自控)的另一种视角
(一)为什么要控制
(二)开环控制和闭环控制
(三)看世界的视角1:时域
(四)看世界的视角2:频域
(五)线性时不变系统
(六)为什么自控中需要卷积和拉普拉斯变换
(七)传递函数
(八)控制理论的基石:反馈
(九)自控数学篇:傅利叶变换
(十)自控数学篇:偏微分方程
(十一)感性认识稳定性
(十二)判断稳定性
(十三)判断稳定性:劳斯判据
(十四)判断稳定性:根轨迹



评论(0)
您还未登录,请登录后发表或查看评论