

声明:本篇文章只是个人知识盲区、知识弱点、重点部分的归纳总结,望各位大佬不喜勿喷。梳理顺序是按照正点原子的视频和文档的实际顺序梳理,转载请注明出处。
作者:sumjess
适用:这个视频我已经看过3遍了,总会有忘记的,所以来写这本书的随手笔记,记录重点、易忘点。该博客可以当做字典,也可以当做笔记。
目前内容:串口通信
一、常见的串行通信接口:
二、STM32的串口通信接口:
UART:通用异步收发器
USART:通用同步异步收发器
大容量STM32F10x系列芯片,包含3个USART和2个UART
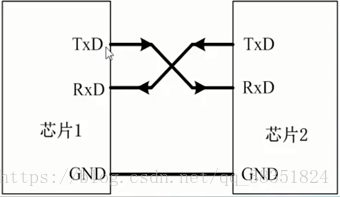
三、UART异步通信方式引脚连接方法:
-RXD:数据输入引脚。数据接受。
-TXD:数据发送引脚。数据发送。
四、UART异步通信方式引脚:
-RXD:数据输入引脚。数据接受。
-TXD:数据发送引脚。数据发送。

五、UART异步通信方式特点:
全双工异步通信。
分数波特率发生器系统,提供精确的波特率。
-发送和接受共用的可编程波特率,最高可达4.5Mbits/s
可编程的数据字长度(8位或者9位);
可配置的停止位(支持1或者2位停止位);
可配置的使用DMA多缓冲器通信。
单独的发送器和接收器使能位。
检测标志:① 接受缓冲器 ②发送缓冲器空 ③传输结束标志
多个带标志的中断源。触发中断。
其他:校验控制,四个错误检测标志。
六、串口通信过程: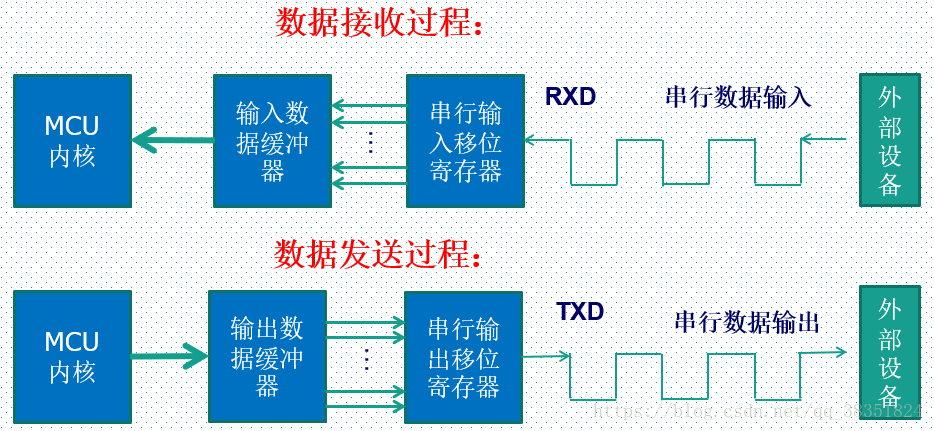
七、STM32串口异步通信需要定义的参数:
① 起始位
② 数据位(8位或者9位)
③ 奇偶校验位(第9位)
④ 停止位(1,15,2位)
⑤ 波特率设置

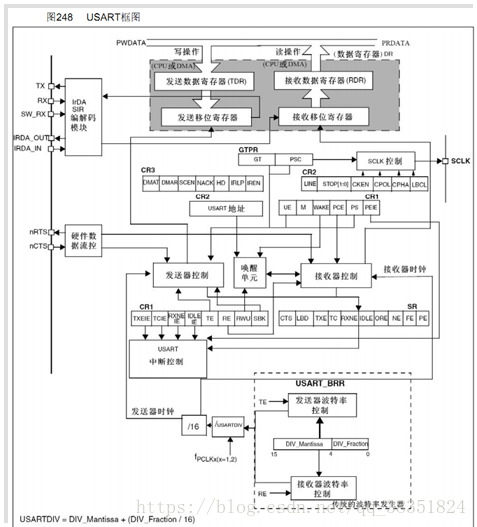
八、常用的串口相关寄存器:
USART_SR状态寄存器
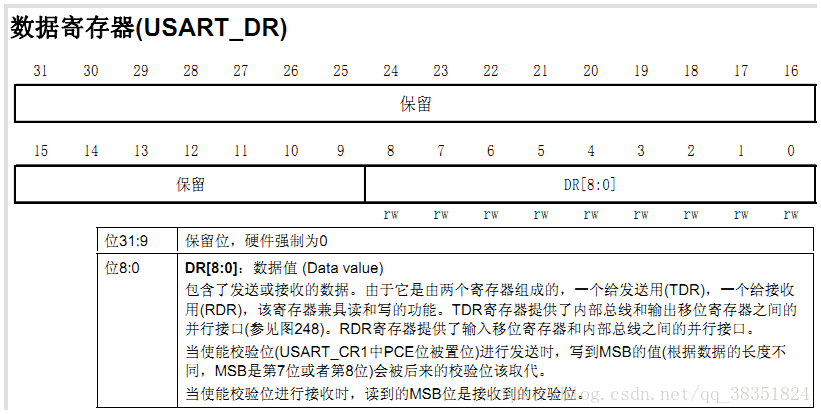
USART_DR数据寄存器
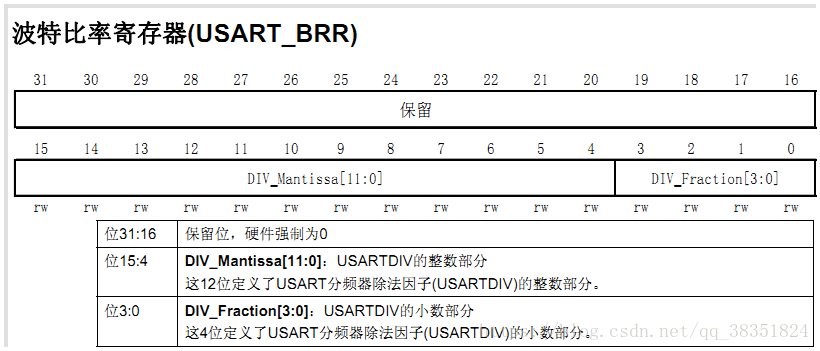
USART_BRR波特率寄存器
九、串口操作相关库函数(省略入口参数):
void USART_Init(); //串口初始化:波特率,数据字长,奇偶校验,硬件流控以及收发使能
void USART_Cmd();//使能串口
void USART_ITConfig();//使能相关中断
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
FlagStatus USART_GetFlagStatus();//获取状态标志位
void USART_ClearFlag();//清除状态标志位
ITStatus USART_GetITStatus();//获取中断状态标志位
void USART_ClearITPendingBit();//清除中断状态标志位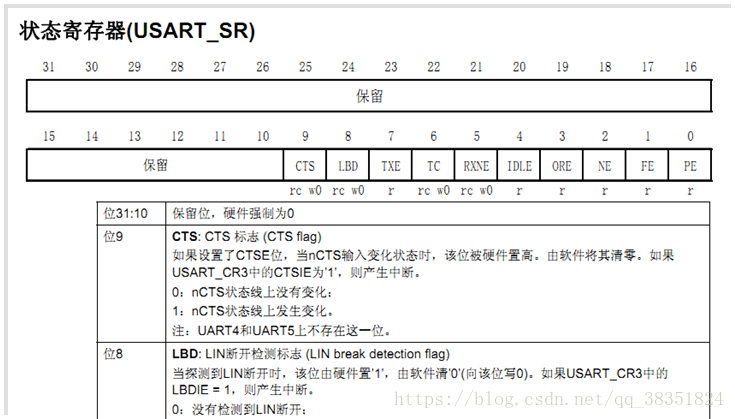
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
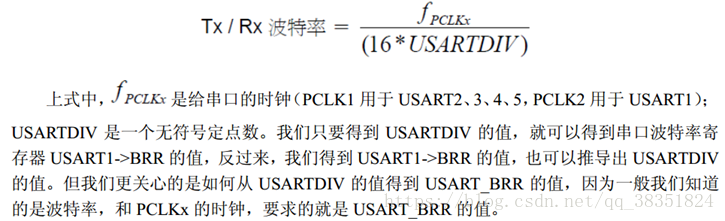
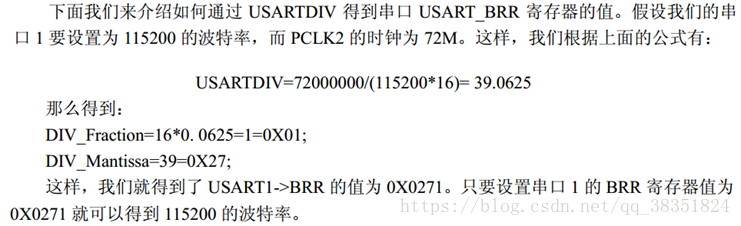
十、波特率计算方法:
十一、串口配置的一般步骤:
①串口时钟使能,GPIO时钟使能:RCC_APB2PeriphClockCmd();
②串口复位:USART_DeInit(); 这一步不是必须的
③GPIO端口模式设置:GPIO_Init(); 模式设置为GPIO_Mode_AF_PP
④串口参数初始化:USART_Init();
⑤开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)
NVIC_Init();
USART_ITConfig();
⑥使能串口:USART_Cmd();
⑦编写中断处理函数:USARTx_IRQHandler();
⑧串口数据收发:
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
⑨串口传输状态获取:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
十二、Printf支持:
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{ int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{ x = x; }
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif 复制#define USART_REC_LEN 200 //定义最大接收字节数 200
u8 USART_RX_BUF[USART_REC_LEN];
//接收缓冲,最大USART_REC_LEN个字节.末字节为换行符
u16 USART_RX_STA; //接收状态标记
define USART_REC_LEN 200 //定义最大接收字节数 200
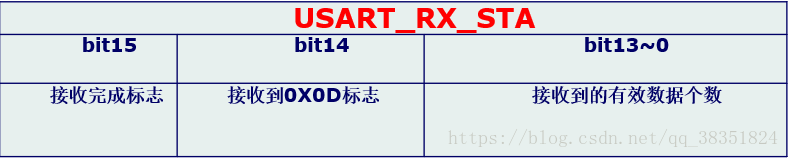
程序要求,发送的字符是以回车换行结束(0x0D,0x0A)
")


评论(0)
您还未登录,请登录后发表或查看评论