

0. 简介
在自动驾驶中,我们常常会面对这线性代数位姿表示和坐标系变换问题。之前作者陆陆续续写了一些
1. 线性代数位姿
1.1 矩阵伴随
1.2 四元数实部和虚部
一个标量和一个矢量来表示四元数就会如下图所示,这样会便于我们计算四元数之间的累乘变换
乘法运算中,向量的计算方法比较容易记忆,相乘后实部为两实部相乘减去两虚部正交,虚部为两个四元数和实部和虚部交叉相乘的和加上虚部的叉积。连续旋转两个角度可以用这两个旋转对应的四元数的乘积来表示,即
1.3 四元数与时间
我们说四元数是除了旋转矩阵以外的另一种对旋转表达方式,并且它不具备奇异性,可以表达任意三维旋转,因此有必要学习一下它对时间的求导方式。
首先来看四元数和角轴的转换关系,假设某个旋转运动的旋转轴为单位向量 , 绕该轴旋转的角度为 那这个旋转的对应的四元数可表示为:
对时间求导:当旋转一段微小时间时,旋转经过角度可以视为趋于 ,因此上述四元数为:
其中, 的方向为旋转轴,模长为(这段时间内非常微小的)旋转角度。
下面对时间求导:
上式中, 是求导时间的角速度。
1.4 旋转矩阵和旋转向量
从旋转向量到旋转矩阵基本就是通过罗德里格斯公式表明:
从旋转矩阵到旋转向量的过程可以利用矩阵迹(trace)的性质进行推导:
1.5 李群李代数扰动
李群( )对应的李代数 的指数映射时。并且两个李代数其中有一个为小量时,二次项以上的小量都可以忽略。此时, BCH 公式有以下线性形式:
当我们对一个旋转 左乘或者右乘一个扰动 时,BCH 近似过程可以表示为:
而反过来,当我们对一个李代数 加上一个微小扰动 时,通过 BCH 可以近似为:
1.6 李群累加
对于李群而言,由于其没有向量空间上的加法操作,因此为了引入导数的概念,这里用一个映射将局部坐标 映射到李群元素 在李群空间附近的邻域上,用来作为李群上的 “加法” 操作,所以常常会使用 来表示李群的加法,如下所示:
式中, 是 系下的局部坐标,这个也是我们所说的极小值右乘的做法,以李群 SO(3) 为例,局部坐标可以表示为 ,其几何意义为以 作为参考系下的一个角度扰动;
为 的对应李代数,当然也可以像上面表示为 ;
为李代数到李群的指数映射;
为李代数,李代数可以转化为反对称矩阵。通过 来表示角度扰动(旋转轴+旋转角度)的旋转向量。
2. 各种传感器默认坐标系
2.1 摄像头坐标系 相机坐标系的方向一般为:X –> 右,Y –> 下,Z –> 前 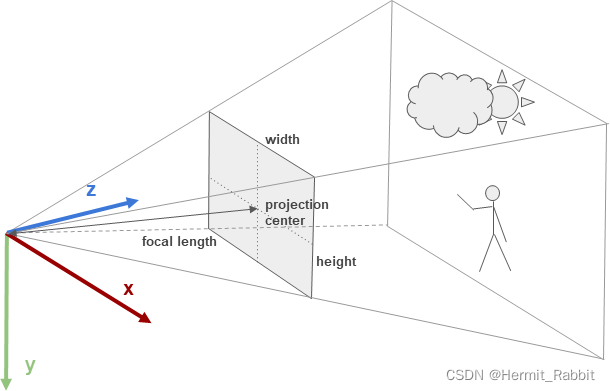
2.2 雷达坐标系
雷达坐标系的方向一般为:Z->上,X->右,Y->前 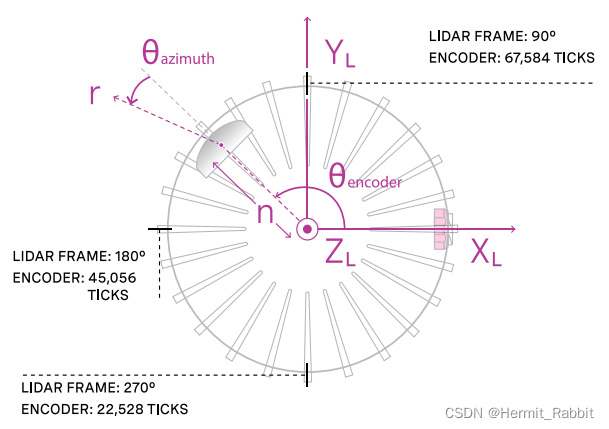
2.3 IMU坐标系
IMU坐标系的方向一般为:Z->下,X->右,Y->后 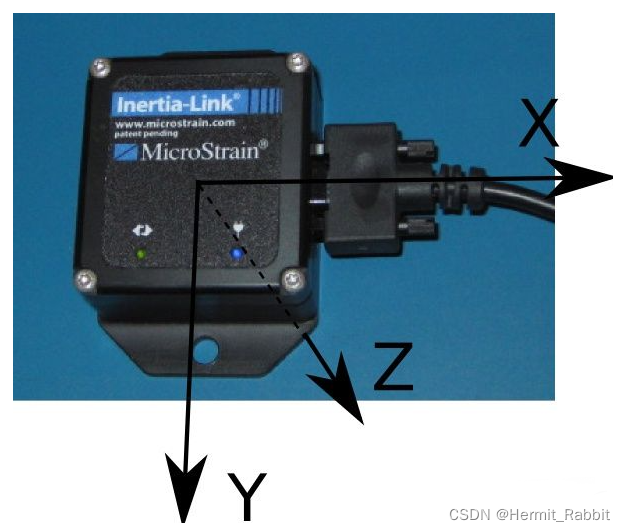
2.4 GPS坐标系
GPS 自身没有坐标系,一般是由经度和纬度组成。在世界坐标系(WGS84)下的坐标值我们可以通过变换转到本地坐标系,一般会和里程计的坐标系绑定在一起。
2.5 轮速坐标系/车体坐标系
车体坐标系原点在载体质量中心与载体固链,x轴沿载体轴指向右,y轴指向前,z轴和xy满足右手坐标法则指天,又称为右-前-上(r-f-u)坐标系 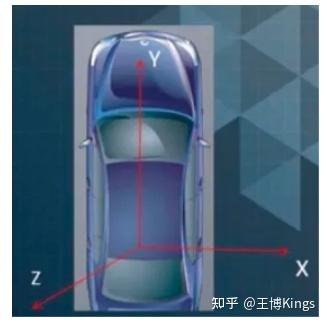
TODO 等看到其他的再更新
3. 参考链接
https://blog.csdn.net/u011754972/article/details/117122975
https://zhuanlan.zhihu.com/p/401812577
https://xiaotaoguo.com/p/mapping_coordinate_systems/
https://www.csdn.net/tags/MtjaggysNzUwODItYmxvZwO0O0OO0O0O.html

评论(2)
您还未登录,请登录后发表或查看评论