
基本RRT算法更偏向于遍历所有自由空间直到获取可行路由性,这使得它不能够进行未知或动态环境条件中的机器人实时运动计划。利用滚动计划的思路可以将RRT算法加以完善,使之更具有实时规划能力。
滚动规划
机器人在不确定的或动态周围环境中行走时,可以探知在其传感器区域内或限定区域的周围环境讯息。机器人可以使用局部信息制定局部运动规划,并使用适当的评估标准达到部分总体目标。然后机器人可以在到达部分总体目标以后,继续制定新的部分计划。就这样,不断实施直至抵达新全局目标。
滚动规划算法的基本原理:
环保信息系统预测:在滚动的每一次,机器人通过检测到的视野内的环保信息系统、或任何存在的环保信息系统,建立保护模式,包含设定在已知范围内的环保节点类型信息系统等;
局部的优化:把这些环境信息模式视为下一次优化的窗口,并在此基础上,按照子目标点的实际情况和特定的优化对策,设计出下一次的最佳子总体目标,接着再依据子总体目标的环境信息模式,选用局部规划算法,先设定向子总体目标前进的部分路线,再执行当前对策,即依所制定的部分路线前进若干步骤,窗口也随之往前滑动;
反馈信息修正:通过局部最优路线,驱动机器人走过一个路线时,机器人将检测到新的未知信号,此时可通过其在行进中检测到的信息数据调整或修正原有的环境模式,进行滚动和下步的局部设计。
这里,部分子目标是在滚动窗口中对某个全局目标的进行条件反射,它需要远离障碍物,并符合一些优化目标。子目标的选定方式,体现了对全局优势的追求和对局部整体受限信息条件的折衷,是在给定的社会环境条件下企图进行整体性考虑的天然选项。
通过滚动窗口的路径规划算法把实时检测到的局部环境信号,以滚动方法实现网络设计。在滑动的每一次,将针对已检测到的环境保护局部信息,采用启发式策略生成环境优化子目标,在当前的视窗中完成环境保护局部路径计划,进而执行当前决策(依局部规划路径推移一次),随着滚动窗口推移,将持续地获取最新的环境信息,以便于在滚动中进行环境优化和反馈信息的整合。同时由于环境规划问题压缩在滚动窗口中,其与环境保护全局计划比较的运算工作量将大为减轻。
采用滚动窗口的路径规划方式的具体步骤为:
第一步为0:先对起始、终端、环境、机器人的视线半径、步长等完成初始化;
步骤1:若终点抵达,则规划中止;
操作2:对当前滚动窗内的所有环境消息予以刷新;
步骤3:产生局部子目标;
过程4:基于子目标和现存条件信息,在当前滚动窗口内计划一个经过调整的局部有效路线;
方法5:按规划的局部路径走进每一步,步长必须等于视野半径;
步骤6:返回步骤1。
滚动在线RRT算法流程
在一个滚动窗口内,随机树以当前区域为开始节点,并建立传感器区域内的所有随机树。结构方式与最基本RRT算法相同。但能够使在全局条件中随机树产生朝目标方向发展的态势,在运动规划时导入启发信号,以降低随机树的随机性,并增加搜索效果[7]。
以Road(x1,x2)指代随意树中二个位置节点间的道路价格,Dis(x1,x2)指代随意树中二个位置节点间的欧几里德距离。相似于Astar方法,本方法为随意树中各个节点设定一种估值参数:f(x)=g(x)+h(x)。当中g(x)=Road(x,xrand)为随意节点,而xrand则代表到树中目的结点x所需的道路时间。H(x)是启发的估值参数,在此处可取随意节点xrand到目标节点xgoal的距离作为估计值,h(x)=Dis(xrand,xgoal)。所以,f(x)就代表了从目的节点x经随机结点xrand至目的地节点xgoal的路线估量值。遍历滚动窗内随机树T时,若取估量函数中较小值的结点xnear,则f(xnear)=min(f(x))。它允许随机树按照距离为目标节点估计值f(x)很小的地方开始延伸,如图所示。

综上,在滚动窗内随机树建立的具体实施方法包括:
1.对滚动窗口随机树T初始化后,T起始时只包括了起始地址S;
2.滚动窗口自由空间中,随机选取了一种状态的xrand;
3.基于最短路线的思想寻找在树T中,与xrand距离最近的结点xnear;
4.选择输入u,将机器人状态由xnear到xnew;
5.确定了xnew是否满足回归分析,不满足则返回第四步骤;
6.将xnew看作随机树T的一个新结点时,u将被写在连接结点xnear的xnew的边上。
滑动窗口的目标空间在进行了K的抽样以后,将遍历随机树,就能够按照启发的估计思路找出当前滑窗口目标空间xsub,xsub是指在当前滑窗口中的每个子树中,所估计最小的节点。选定子目标后,在机器人前完成到达子目标点,并开始下一次的滚动RRT规划工作。过程就这样重复下去,直到抵达了子目标点G。
BUG算法,可以提供一个完全应激的机器人避障方案。其计算机理为近似昆虫爬行的运动行为模式。当未碰到屏障时,按直线朝目标方向前进;当出现车辆时,可以沿着车辆边缘绕行,或按照特定的判断规则避开车辆后接着直行。因为这种方应激式的方法在计算上比较简单,而且不要求获知全局图形和障碍物的形式,因此具有高度完备性。但是由于其所产生的路径均匀特性还不够好,对机器人的各种微分条件适应性也比较较差。
BUG1算法
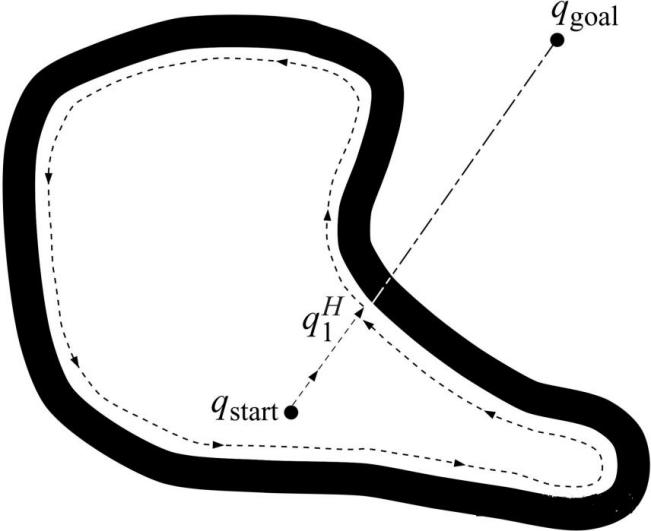
该计算的基本思路是在目标周围毫无阻挡物体时,顺着垂直路径朝目标运动即可获得最短的路径。当感应器侦测到了车辆时,自己绕行车辆直到还能持续围绕着直线项目标运动。BUG1算法就完成了最基本的向目标方向直行,并绕行车辆的动作思想[8],如图3.9所示。

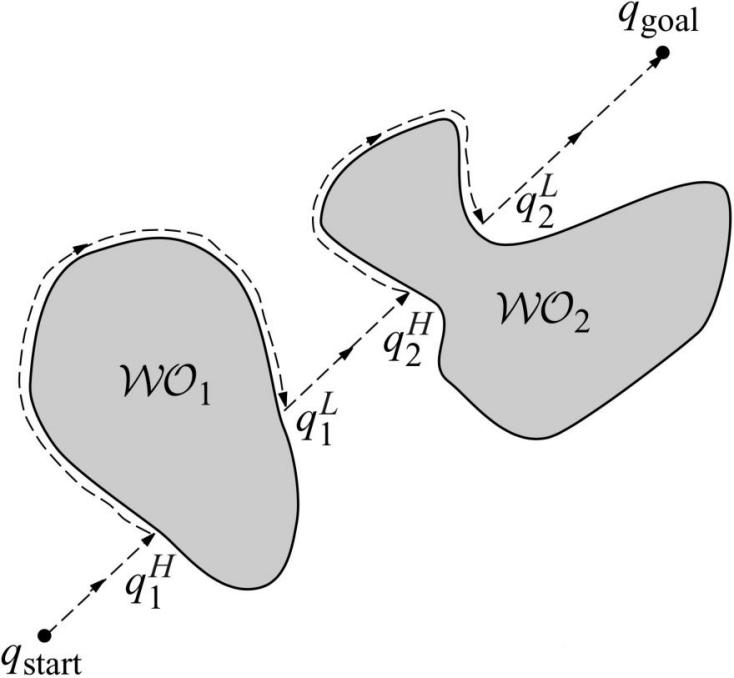
假设机器人能够测定二点之间的相对位移,但不考虑自动化机器人的相对位移偏差。初始地点和当前位置分别以qstart和qgoal表示;而机器人在i时的相对位置则显示为xi;l代表了联系着自己所在地xi和当前地点的直线。在开始时,xi=qstart。如果还不能探测到障碍物,那么机器人将沿着l向目标方位直行,直到抵达当前地点并碰到障碍物。在碰到障碍物后,将记下当前地点qHi。接着机器人将周绕所有障碍物直到最后一次到达qHi,然后将寻找环绕路线中距离目标最近的下一地点qLi,并沿着障碍物边缘移动至当前地点。然后,将直线l改变,机器人继续沿着直线朝目的地方位前进。但是如果在这条直线的途中仍然会出现该障碍物,则机器人将始终不能抵达目标地点。否则算法将会不断的循环直至机器人再次抵达目标地点,又或者计算机依旧认为机器人还没能到达目标地点,如图所示。
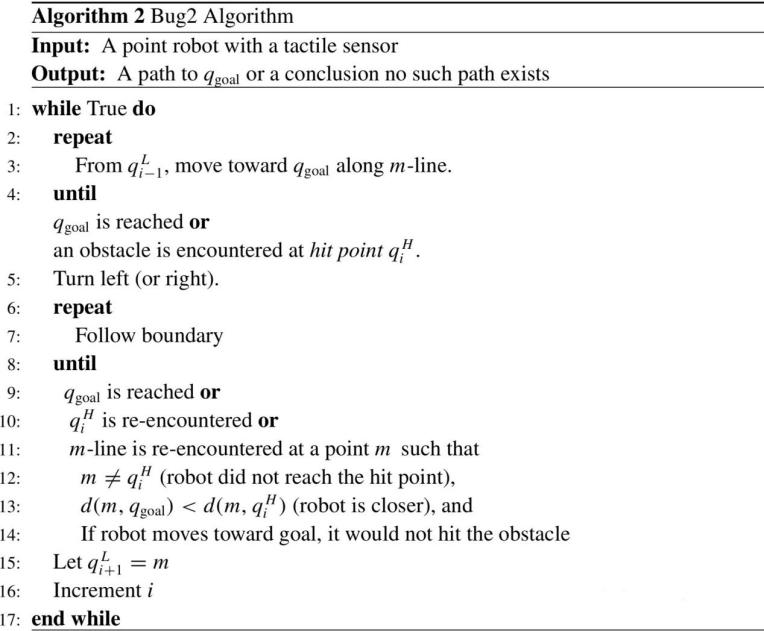
BUG2算法
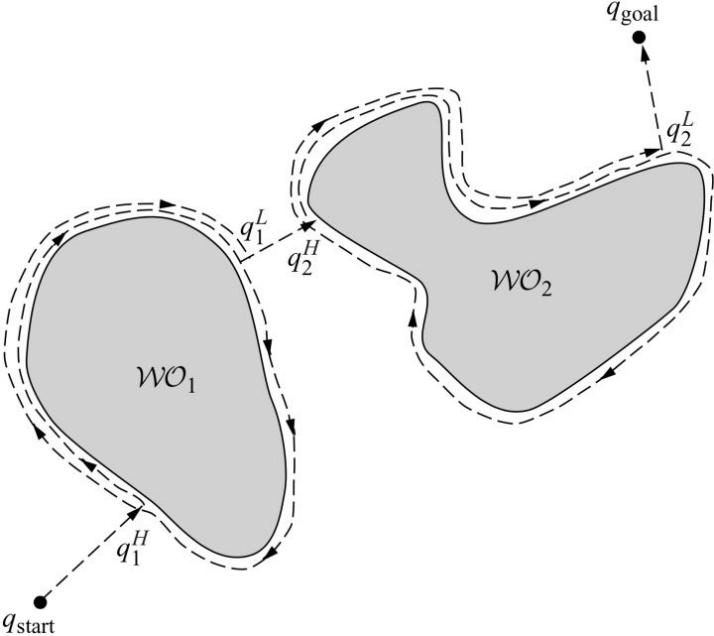
BUG二算法中,也有另外二个运动:沿着目标的方向直行,还是沿着边界方向绕行。不过和BUG1计算结果不同的是,在BUG2计算结果中的直线l是联系在起始点与目标点之间的直线,在整个计算流程中保持速度恒定。当机器人所在地点附近出现障碍物时,机器人就开始绕道障碍物,但如果机器人在绕道过程中在离目标更近的地方上再次出现了垂直l,那么就终止了绕道,转而仍然顺着垂直l朝目标方向直行。进行了这样的恶性循环,直到机器人抵达了目标地qgoal。但假如机器人在绕道过程中并不是出现在直线l上,与目标地点距离更接近的qLi地点,而是直接到达了qHi地点,则得出的结论,就是机器人并不能到达目标。如图所示。
BUG1和BUG2计算都提供了查找问题的二个基本方式:较为保守的BUG1计算采用了更加精细的方式寻找,来获得最佳的距离地点。这就要求机器人围绕着各个障碍物的边界。而BUG2计算则选取了一种比较投机的方法。智能机器人并不能跨越完全的屏障,而仅仅选定了一处可用的地点作为离开场所。所以面对较为普通的环境,BUG2计算的效能将会较高;但面对较复杂类型的障碍物,在相对保守的环境BUG1计算性能将更好。
TangentBUG2算法
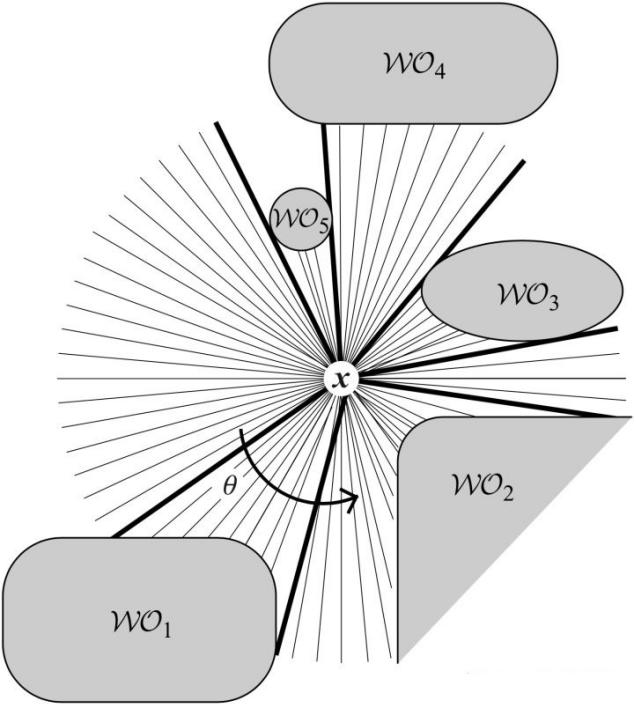
TangentBUG算法是对BUG二算法的改进。它通过使用机器人的间距感应器的读数对阻碍物进行提前规避,从而能够达到更短更平缓的机器人路径。在一种静止环境条件中,距离传感器读数的ρ(x,θ)是机器人方位x和感应器扫描夹角θ的参数,具体化点说,ρ(x,θ)也就是顺着x的射线以角θ到最近阻碍物时的间距[9]:

其中

对于某一固定的区域x,ρ可以把在传感器视域内的障碍物划分为几个连续区域。如图所显示。Ρ出现在不持续或或达到传感器最佳检测区域的角度,是指这个连续区域的端点。TangentBUG算法使用者些区域的端点躲避了工作空气中的障碍物,如图所示。




评论(0)
您还未登录,请登录后发表或查看评论