

0. 简介
在上文中讲述了激光雷达的数据获取以及特征点提取的操作,这一节我们将围绕着IMU_Processing这一节来进行介绍。
1. ImuProcess类定义
在ImuProcess.hpp中,一开始就是完成了对ImuProcess类的申明,里面我们可以看到在imu中最主要的还是角速度和加速度这两项特征,这与视觉SLAM的imu融合非常相似。
//判断点的时间是否先后颠倒
const bool time_list(PointType &x, PointType &y) { return (x.curvature < y.curvature); };
/// *************IMU Process and undistortion
class ImuProcess
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
ImuProcess();
~ImuProcess();
void Reset();
void Reset(double start_timestamp, const sensor_msgs::ImuConstPtr &lastimu);
void set_extrinsic(const V3D &transl, const M3D &rot);
void set_extrinsic(const V3D &transl);
void set_extrinsic(const MD(4, 4) & T);
void set_gyr_cov(const V3D &scaler);
void set_acc_cov(const V3D &scaler);
void set_gyr_bias_cov(const V3D &b_g);
void set_acc_bias_cov(const V3D &b_a);
Eigen::Matrix<double, 12, 12> Q;
void Process(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, PointCloudXYZI::Ptr pcl_un_);
ofstream fout_imu; // imu参数输出文件
V3D cov_acc; //加速度测量协方差
V3D cov_gyr; //角速度测量协方差
V3D cov_acc_scale; //加速度测量协方差
V3D cov_gyr_scale; //角速度测量协方差
V3D cov_bias_gyr; //角速度测量协方差偏置
V3D cov_bias_acc; //加速度测量协方差偏置
double first_lidar_time; //当前帧第一个点云时间
private:
void IMU_init(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, int &N);
void UndistortPcl(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, PointCloudXYZI &pcl_in_out);
PointCloudXYZI::Ptr cur_pcl_un_; //当前帧点云未去畸变
sensor_msgs::ImuConstPtr last_imu_; // 上一帧imu
deque<sensor_msgs::ImuConstPtr> v_imu_; // imu队列
vector<Pose6D> IMUpose; // imu位姿
vector<M3D> v_rot_pcl_; //未使用
M3D Lidar_R_wrt_IMU; // lidar到IMU的旋转外参
V3D Lidar_T_wrt_IMU; // lidar到IMU的位置外参
V3D mean_acc; //加速度均值,用于计算方差
V3D mean_gyr; //角速度均值,用于计算方差
V3D angvel_last; //上一帧角速度
V3D acc_s_last; //上一帧加速度
double start_timestamp_; //开始时间戳
double last_lidar_end_time_; //上一帧结束时间戳
int init_iter_num = 1; //初始化迭代次数
bool b_first_frame_ = true; //是否是第一帧
bool imu_need_init_ = true; //是否需要初始化imu
};
2. 构造函数与传入函数
首先就是调用初始化的构造函数和重置函数。
ImuProcess::ImuProcess()
: b_first_frame_(true), imu_need_init_(true), start_timestamp_(-1)
{
init_iter_num = 1; //初始化迭代次数
Q = process_noise_cov(); //调用use-ikfom.hpp里面的process_noise_cov完成噪声协方差的初始化
cov_acc = V3D(0.1, 0.1, 0.1); //加速度测量协方差初始化
cov_gyr = V3D(0.1, 0.1, 0.1); //角速度测量协方差初始化
cov_bias_gyr = V3D(0.0001, 0.0001, 0.0001); //角速度测量协方差偏置初始化
cov_bias_acc = V3D(0.0001, 0.0001, 0.0001); //加速度测量协方差偏置初始化
mean_acc = V3D(0, 0, -1.0);
mean_gyr = V3D(0, 0, 0);
angvel_last = Zero3d; //上一帧角速度初始化
Lidar_T_wrt_IMU = Zero3d; // lidar到IMU的位置外参初始化
Lidar_R_wrt_IMU = Eye3d; // lidar到IMU的旋转外参初始化
last_imu_.reset(new sensor_msgs::Imu()); //上一帧imu初始化
}
ImuProcess::~ImuProcess() {}
//重置参数
void ImuProcess::Reset()
{
// ROS_WARN("Reset ImuProcess");
mean_acc = V3D(0, 0, -1.0);
mean_gyr = V3D(0, 0, 0);
angvel_last = Zero3d;
imu_need_init_ = true; //是否需要初始化imu
start_timestamp_ = -1; //开始时间戳
init_iter_num = 1; //初始化迭代次数
v_imu_.clear(); // imu队列清空
IMUpose.clear(); // imu位姿清空
last_imu_.reset(new sensor_msgs::Imu()); //上一帧imu初始化
cur_pcl_un_.reset(new PointCloudXYZI()); //当前帧点云未去畸变初始化
}
然后就是外参和偏置协方差的传入
//传入外参,包含R,T
void ImuProcess::set_extrinsic(const MD(4, 4) & T)
{
Lidar_T_wrt_IMU = T.block<3, 1>(0, 3);
Lidar_R_wrt_IMU = T.block<3, 3>(0, 0);
}
//传入外参,包含T
void ImuProcess::set_extrinsic(const V3D &transl)
{
Lidar_T_wrt_IMU = transl;
Lidar_R_wrt_IMU.setIdentity();
}
// 传入外参,包含R,T
void ImuProcess::set_extrinsic(const V3D &transl, const M3D &rot)
{
Lidar_T_wrt_IMU = transl;
Lidar_R_wrt_IMU = rot;
}
// 传入陀螺仪角速度协方差
void ImuProcess::set_gyr_cov(const V3D &scaler)
{
cov_gyr_scale = scaler;
}
// 传入加速度计加速度协方差
void ImuProcess::set_acc_cov(const V3D &scaler)
{
cov_acc_scale = scaler;
}
// 传入陀螺仪角速度协方差偏置
void ImuProcess::set_gyr_bias_cov(const V3D &b_g)
{
cov_bias_gyr = b_g;
}
// 传入加速度计加速度协方差偏置
void ImuProcess::set_acc_bias_cov(const V3D &b_a)
{
cov_bias_acc = b_a;
}
3. IMU初始化
这一部分主要是IMU的初始化,内部主要是对x_和P_完成了初始化,这里涉及到esikfom文件内部的知识,这里暂且先不讲
void ImuProcess::IMU_init(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, int &N)
{
/** 1. 初始化重力、陀螺偏差、acc和陀螺仪协方差
/** 2. 将加速度测量值标准化为单位重力**/
//这里应该是静止初始化
V3D cur_acc, cur_gyr;
if (b_first_frame_) //判断是否为第一帧
{
Reset(); //重置参数
N = 1; //将迭代次数置1
b_first_frame_ = false;
const auto &imu_acc = meas.imu.front()->linear_acceleration; //从common_lib.h中拿到imu初始时刻的加速度
const auto &gyr_acc = meas.imu.front()->angular_velocity; //从common_lib.h中拿到imu初始时刻的角速度
mean_acc << imu_acc.x, imu_acc.y, imu_acc.z; //加速度测量作为初始化均值
mean_gyr << gyr_acc.x, gyr_acc.y, gyr_acc.z; //角速度测量作为初始化均值
first_lidar_time = meas.lidar_beg_time; //将当期imu帧对应的lidar时间作为初始时间
}
//计算方差
for (const auto &imu : meas.imu) //拿到所有的imu帧
{
const auto &imu_acc = imu->linear_acceleration;
const auto &gyr_acc = imu->angular_velocity;
cur_acc << imu_acc.x, imu_acc.y, imu_acc.z;
cur_gyr << gyr_acc.x, gyr_acc.y, gyr_acc.z;
//根据当前帧和均值差作为均值的更新
mean_acc += (cur_acc - mean_acc) / N;
mean_gyr += (cur_gyr - mean_gyr) / N;
//.cwiseProduct()对应系数相乘
//每次迭代之后均值都会发生变化,最后的方差公式中减的应该是最后的均值
// https://blog.csdn.net/weixin_44479136/article/details/90510374 方差迭代计算公式
//按照博客推导出来的下面方差递推公式有两种
//第一种是
cov_acc = cov_acc * (N - 1.0) / N + (cur_acc - mean_acc).cwiseProduct(cur_acc - mean_acc) / (N - 1.0);
cov_gyr = cov_gyr * (N - 1.0) / N + (cur_gyr - mean_gyr).cwiseProduct(cur_gyr - mean_gyr) / (N - 1.0);
//第二种是
// cov_acc = cov_acc * (N - 1.0) / N + (cur_acc - mean_acc).cwiseProduct(cur_acc - 上一次的mean_acc) / N;
// cov_gyr = cov_gyr * (N - 1.0) / N + (cur_gyr - mean_gyr).cwiseProduct(cur_gyr - 上一次的mean_gyr) / N;
// cout<<"acc norm: "<<cur_acc.norm()<<" "<<mean_acc.norm()<<endl;
N++;
}
state_ikfom init_state = kf_state.get_x(); //在esekfom.hpp获得x_的状态
init_state.grav = S2(-mean_acc / mean_acc.norm() * G_m_s2); //从common_lib.h中拿到重力,并与加速度测量均值的单位重力求出SO2的旋转矩阵类型的重力加速度
// state_inout.rot = Eye3d; // Exp(mean_acc.cross(V3D(0, 0, -1 / scale_gravity)));
init_state.bg = mean_gyr; //角速度测量作为陀螺仪偏差
init_state.offset_T_L_I = Lidar_T_wrt_IMU; //将lidar和imu外参位移量传入
init_state.offset_R_L_I = Lidar_R_wrt_IMU; //将lidar和imu外参旋转量传入
kf_state.change_x(init_state); //将初始化状态传入esekfom.hpp中的x_
esekfom::esekf<state_ikfom, 12, input_ikfom>::cov init_P = kf_state.get_P(); //在esekfom.hpp获得P_的协方差矩阵
init_P.setIdentity(); //将协方差矩阵置为单位阵
init_P(6, 6) = init_P(7, 7) = init_P(8, 8) = 0.00001; //将协方差矩阵的位置和旋转的协方差置为0.00001
init_P(9, 9) = init_P(10, 10) = init_P(11, 11) = 0.00001; //将协方差矩阵的速度和位姿的协方差置为0.00001
init_P(15, 15) = init_P(16, 16) = init_P(17, 17) = 0.0001; //将协方差矩阵的重力和姿态的协方差置为0.0001
init_P(18, 18) = init_P(19, 19) = init_P(20, 20) = 0.001; //将协方差矩阵的陀螺仪偏差和姿态的协方差置为0.001
init_P(21, 21) = init_P(22, 22) = 0.00001; //将协方差矩阵的lidar和imu外参位移量的协方差置为0.00001
kf_state.change_P(init_P); //将初始化协方差矩阵传入esekfom.hpp中的P_
last_imu_ = meas.imu.back(); //将最后一帧的imu数据传入last_imu_中,暂时没用到
}
4. IMU更新
在UndistortPcl函数中不但有IMU的前向信息,还有激光雷达去畸变的问题,这一节我们围绕着IMU的正向传播展开,代码中通过迭代的形式完成了IMU数据的更新,并将acc和gyro的数据传入到ESKF中,详细的公式我们后面再来讲。
void ImuProcess::UndistortPcl(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, PointCloudXYZI &pcl_out)
{
auto v_imu = meas.imu; //拿到当前的imu数据
v_imu.push_front(last_imu_); //将上一帧最后尾部的imu添加到当前帧头部的imu
const double &imu_beg_time = v_imu.front()->header.stamp.toSec(); //拿到当前帧头部的imu的时间(也就是上一帧尾部的imu时间戳)
const double &imu_end_time = v_imu.back()->header.stamp.toSec(); //拿到当前帧尾部的imu的时间
const double &pcl_beg_time = meas.lidar_beg_time; // pcl开始的时间戳
/*** sort point clouds by offset time ***/
// 根据点云中每个点的时间戳对点云进行重排序
pcl_out = *(meas.lidar);
sort(pcl_out.points.begin(), pcl_out.points.end(), time_list);
const double &pcl_end_time = pcl_beg_time + pcl_out.points.back().curvature / double(1000); //拿到最后一帧时间戳加上最后一帧的所需要的时间/1000得到点云的结束时间戳
// cout<<"[ IMU Process ]: Process lidar from "<<pcl_beg_time<<" to "<<pcl_end_time<<", " \
// <<meas.imu.size()<<" imu msgs from "<<imu_beg_time<<" to "<<imu_end_time<<endl;
/*** Initialize IMU pose ***/
state_ikfom imu_state = kf_state.get_x(); // 获取上一次KF估计的后验状态作为本次IMU预测的初始状态
IMUpose.clear(); //清空IMUpose
//将初始状态加入IMUpose中,包含有时间间隔,上一帧加速度,上一帧角速度,上一帧速度,上一帧位置,上一帧旋转矩阵
IMUpose.push_back(set_pose6d(0.0, acc_s_last, angvel_last, imu_state.vel, imu_state.pos, imu_state.rot.toRotationMatrix()));
/*** forward propagation at each imu point ***/
//前向传播对应的参数
V3D angvel_avr, acc_avr, acc_imu, vel_imu, pos_imu; // angvel_avr为平均角速度,acc_avr为平均加速度,acc_imu为imu加速度,vel_imu为imu速度,pos_imu为imu位置
M3D R_imu; // imu旋转矩阵
double dt = 0; //时间间隔
input_ikfom in; // eksf 传入的参数
// 遍历本次估计的所有IMU测量并且进行积分,离散中值法 前向传播
for (auto it_imu = v_imu.begin(); it_imu < (v_imu.end() - 1); it_imu++)
{
auto &&head = *(it_imu); //拿到当前帧的imu数据
auto &&tail = *(it_imu + 1); //拿到下一帧的imu数据
//判断时间先后顺序 不符合直接continue
if (tail->header.stamp.toSec() < last_lidar_end_time_)
continue;
// 中值积分
angvel_avr << 0.5 * (head->angular_velocity.x + tail->angular_velocity.x),
0.5 * (head->angular_velocity.y + tail->angular_velocity.y),
0.5 * (head->angular_velocity.z + tail->angular_velocity.z);
acc_avr << 0.5 * (head->linear_acceleration.x + tail->linear_acceleration.x),
0.5 * (head->linear_acceleration.y + tail->linear_acceleration.y),
0.5 * (head->linear_acceleration.z + tail->linear_acceleration.z);
// fout_imu << setw(10) << head->header.stamp.toSec() - first_lidar_time << " " << angvel_avr.transpose() << " " << acc_avr.transpose() << endl;
//通过重力数值对加速度进行一下微调
acc_avr = acc_avr * G_m_s2 / mean_acc.norm(); // - state_inout.ba;
//如果IMU开始时刻早于上次雷达最晚时刻(因为将上次最后一个IMU插入到此次开头了,所以会出现一次这种情况)
if (head->header.stamp.toSec() < last_lidar_end_time_)
{
//从上次雷达时刻末尾开始传播 计算与此次IMU结尾之间的时间差
dt = tail->header.stamp.toSec() - last_lidar_end_time_;
// dt = tail->header.stamp.toSec() - pcl_beg_time;
}
else
{
//两个IMU时刻之间的时间间隔
dt = tail->header.stamp.toSec() - head->header.stamp.toSec();
}
// 原始测量的中值作为更新
in.acc = acc_avr;
in.gyro = angvel_avr;
// 配置协方差矩阵
Q.block<3, 3>(0, 0).diagonal() = cov_gyr;
Q.block<3, 3>(3, 3).diagonal() = cov_acc;
Q.block<3, 3>(6, 6).diagonal() = cov_bias_gyr;
Q.block<3, 3>(9, 9).diagonal() = cov_bias_acc;
// IMU前向传播,每次传播的时间间隔为dt
kf_state.predict(dt, Q, in);
/* save the poses at each IMU measurements */
// 保存IMU预测过程的状态
imu_state = kf_state.get_x();
angvel_last = angvel_avr - imu_state.bg; //计算出来的角速度与预测的角速度的差值
acc_s_last = imu_state.rot * (acc_avr - imu_state.ba); //计算出来的加速度与预测的加速度的差值,并转到IMU坐标系下
for (int i = 0; i < 3; i++)
{
acc_s_last[i] += imu_state.grav[i]; //加上重力得到世界坐标系的加速度
}
double &&offs_t = tail->header.stamp.toSec() - pcl_beg_time; //后一个IMU时刻距离此次雷达开始的时间间隔
IMUpose.push_back(set_pose6d(offs_t, acc_s_last, angvel_last, imu_state.vel, imu_state.pos, imu_state.rot.toRotationMatrix())); //保存IMU预测过程的状态
}
// 把最后一帧IMU测量也补上
// 判断雷达结束时间是否晚于IMU,最后一个IMU时刻可能早于雷达末尾 也可能晚于雷达末尾
double note = pcl_end_time > imu_end_time ? 1.0 : -1.0;
dt = note * (pcl_end_time - imu_end_time);
kf_state.predict(dt, Q, in);
imu_state = kf_state.get_x(); //更新IMU状态,以便于下一帧使用
last_imu_ = meas.imu.back(); //保存最后一个IMU测量,以便于下一帧使用
last_lidar_end_time_ = pcl_end_time; //保存这一帧最后一个雷达测量的结束时间,以便于下一帧使用
5. 雷达去畸变
激光雷达通常一个接一个地采样点。因此,当 LiDAR 进行连续运动时,会以不同的姿势对结果点进行采样。为了纠正这种扫描中的运动,我们采用了[22]中提出的反向传播,它根据IMU测量值估计扫描中每个点相对于扫描结束时间的位姿的激光雷达位姿。估计的相对姿态使我们能够根据扫描中每个单独点的精确采样时间,将所有点投射到扫描结束时间。因此,扫描中的点可以被视为在扫描结束时同时采样的所有。
设k为LiDAR扫描的索引,${^Lp_j, j=1,…,m}$为第k次扫描在扫描结束时在本地LiDAR坐标系L上采样的点。由于激光雷达的测量噪声,每个测量点$^Lp_j$通常会受到由测距和定向噪声组成的噪声$^Ln_j$的污染。去除这些噪声,就得到了在激光雷达局部坐标系中的真点位置$^Lp_j^{gt}$:
该真实的点,在使用相应的LiDAR姿态$^GT_{I_k} = (^GR_{I_k}, ^Gp_{I_k})$和外部属性$^IT_L= (^IR_L, ^Ip_L)$而投影到全球框架后,应该正好位于地图上的一个局部小平面补丁上,即:
式中,$^Gu_j$是相应平面的法向量,$^Gq_j$是平面上的一点,如下图。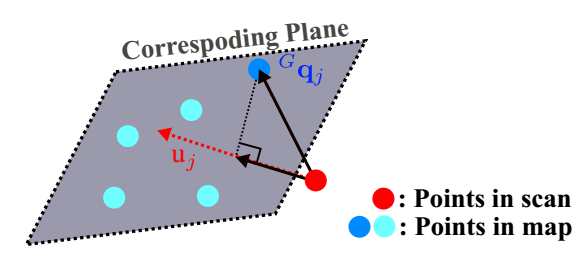
需要注意的是,$^GT_{I_k}$和$^IT_{L_k}$都包含在状态向量$x_k$中。因此,第$j$个测量值$^Lp_j$可以从式(4)归纳为更紧凑的形式,如下。该式定义了状态向量$x_k$的隐式测量模型。
/*** 在处理完所有的IMU预测后,剩下的就是对激光的去畸变了 ***/
// 基于IMU预测对lidar点云去畸变
auto it_pcl = pcl_out.points.end() - 1;
for (auto it_kp = IMUpose.end() - 1; it_kp != IMUpose.begin(); it_kp--)
{
auto head = it_kp - 1;
auto tail = it_kp;
R_imu << MAT_FROM_ARRAY(head->rot); //拿到前一帧的IMU旋转矩阵
// cout<<"head imu acc: "<<acc_imu.transpose()<<endl;
vel_imu << VEC_FROM_ARRAY(head->vel); //拿到前一帧的IMU速度
pos_imu << VEC_FROM_ARRAY(head->pos); //拿到前一帧的IMU位置
acc_imu << VEC_FROM_ARRAY(tail->acc); //拿到后一帧的IMU加速度
angvel_avr << VEC_FROM_ARRAY(tail->gyr); //拿到后一帧的IMU角速度
//点云时间需要迟于前一个IMU时刻 因为是在两个IMU时刻之间去畸变,此时默认雷达的时间戳在后一个IMU时刻之前
for (; it_pcl->curvature / double(1000) > head->offset_time; it_pcl--) //时间除以1000单位化为s
{
dt = it_pcl->curvature / double(1000) - head->offset_time; //点到IMU开始时刻的时间间隔
/*变换到“结束”帧,仅使用旋转
*注意:补偿方向与帧的移动方向相反
*所以如果我们想补偿时间戳i到帧e的一个点
* P_compensate = R_imu_e ^ T * (R_i * P_i + T_ei) 其中T_ei在全局框架中表示*/
M3D R_i(R_imu * Exp(angvel_avr, dt)); //点所在时刻的旋转
V3D P_i(it_pcl->x, it_pcl->y, it_pcl->z); //点所在时刻的位置(雷达坐标系下)
V3D T_ei(pos_imu + vel_imu * dt + 0.5 * acc_imu * dt * dt - imu_state.pos); //从点所在的世界位置-雷达末尾世界位置
//.conjugate()取旋转矩阵的转置 (可能作者重新写了这个函数 eigen官方库里这个函数好像没有转置这个操作 实际测试cout矩阵确实输出了转置)
// imu_state.offset_R_L_I是从雷达到惯性的旋转矩阵 简单记为I^R_L
// imu_state.offset_T_L_I是惯性系下雷达坐标系原点的位置简单记为I^t_L
//下面去畸变补偿的公式这里倒推一下
// e代表end时刻
// P_compensate是点在末尾时刻在雷达系的坐标 简记为L^P_e
//将右侧矩阵乘过来并加上右侧平移
//左边变为I^R_L * L^P_e + I^t_L= I^P_e 也就是end时刻点在IMU系下的坐标
//右边剩下imu_state.rot.conjugate() * (R_i * (imu_state.offset_R_L_I * P_i + imu_state.offset_T_L_I) + T_ei
// imu_state.rot.conjugate()是结束时刻IMU到世界坐标系的旋转矩阵的转置 也就是(W^R_i_e)^T
// T_ei展开是pos_imu + vel_imu * dt + 0.5 * acc_imu * dt * dt - imu_state.pos也就是点所在时刻IMU在世界坐标系下的位置 - end时刻IMU在世界坐标系下的位置 W^t_I-W^t_I_e
//现在等式两边变为 I^P_e = (W^R_i_e)^T * (R_i * (imu_state.offset_R_L_I * P_i + imu_state.offset_T_L_I) + W^t_I - W^t_I_e
//(W^R_i_e) * I^P_e + W^t_I_e = (R_i * (imu_state.offset_R_L_I * P_i + imu_state.offset_T_L_I) + W^t_I
// 世界坐标系也无所谓时刻了 因为只有一个世界坐标系 两边变为
// W^P = R_i * I^P+ W^t_I
// W^P = W^P
V3D P_compensate = imu_state.offset_R_L_I.conjugate() * (imu_state.rot.conjugate() * (R_i * (imu_state.offset_R_L_I * P_i + imu_state.offset_T_L_I) + T_ei) - imu_state.offset_T_L_I); // not accurate!
// save Undistorted points and their rotation
it_pcl->x = P_compensate(0);
it_pcl->y = P_compensate(1);
it_pcl->z = P_compensate(2);
if (it_pcl == pcl_out.points.begin())
break;
}
}
}
6. process主程序
最后一部分是IMU的主程序,这里主要是调用了上面的IMU_init和UndistortPcl函数。
void ImuProcess::Process(const MeasureGroup &meas, esekfom::esekf<state_ikfom, 12, input_ikfom> &kf_state, PointCloudXYZI::Ptr cur_pcl_un_)
{
double t1, t2, t3;
t1 = omp_get_wtime();
if (meas.imu.empty())
{
return;
}; // 拿到的当前帧的imu测量为空,则直接返回
ROS_ASSERT(meas.lidar != nullptr);
if (imu_need_init_)
{
/// 第一个激光雷达帧
IMU_init(meas, kf_state, init_iter_num);
imu_need_init_ = true;
last_imu_ = meas.imu.back();
state_ikfom imu_state = kf_state.get_x();
if (init_iter_num > MAX_INI_COUNT)
{
cov_acc *= pow(G_m_s2 / mean_acc.norm(), 2); //在上面IMU_init()基础上乘上缩放系数
imu_need_init_ = false;
cov_acc = cov_acc_scale;
cov_gyr = cov_gyr_scale;
ROS_INFO("IMU Initial Done");
// ROS_INFO("IMU Initial Done: Gravity: %.4f %.4f %.4f %.4f; state.bias_g: %.4f %.4f %.4f; acc covarience: %.8f %.8f %.8f; gry covarience: %.8f %.8f %.8f",\
// imu_state.grav[0], imu_state.grav[1], imu_state.grav[2], mean_acc.norm(), cov_bias_gyr[0], cov_bias_gyr[1], cov_bias_gyr[2], cov_acc[0], cov_acc[1], cov_acc[2], cov_gyr[0], cov_gyr[1], cov_gyr[2]);
fout_imu.open(DEBUG_FILE_DIR("imu.txt"), ios::out);
}
return;
}
//正向传播 反向传播 去畸变
UndistortPcl(meas, kf_state, *cur_pcl_un_);
t2 = omp_get_wtime();
t3 = omp_get_wtime();
// cout<<"[ IMU Process ]: Time: "<<t3 - t1<<endl;
}
7. 参考链接
https://blog.csdn.net/MWY123_/article/details/124110021
https://zhuanlan.zhihu.com/p/471876531



评论(2)
您还未登录,请登录后发表或查看评论