

不了解 Carla 排行榜的同学可以查看 @Here-Kin 的文章 【排行榜】Carla leaderboard 排行榜 运行与参与手把手教学,本文主要对排行榜的代码格式进行梳理。使用的代码示例来自 Transfuser,关于该参考的体验方法可以查看文章 ADP0. Carla 初体验.
开始之前,请先进入文件夹:Transfuser
cd xxx/transfuser
1. 起始点: leaderboard/scripts/run_evaluation.sh
作用: 为 run_evaluaion.py 文件传参数
参数:
- scenarios # 一个指向 '<map_scenarios>.json' 文件的路径,文件中其中包含地图中的所有场景
- routes # 一个指向 '<map_routes>.xml' 文件的路径,文件中包含地图中的所有路线。 路线使用的起点坐标和终点的坐标表示。
- repetitions # 1 表示多次评估运行; 0 用于单次评估运行。
- track # SENSOR 或者 MAP,即你想要参加的比赛类型。
- checkpoint # 一个指向 '<results>.json' 文件的路径,其中包含用于保存统计信息和测评结果。
- agent # 一个指向模型代理 '<agent>.py' 文件的路径。
- agent-config # 一个指向预训练模型参数 '<best_model>.pth' 文件的路径。
- debug # 是否开启调试模式,开启后可以看到由黑色路径点表示的全局路线。使用 1 或 0 来开启和关闭。
- record # 是否使用 CARLA 录制功能创建场景录制。使用 1 或 0 来开启和关闭。
- resume # 是否从上一个检查点恢复执行?使用 1 或 0 来开启和关闭。
- port # TCP 端口(默认值:2000)。
- trafficManagerPort # TrafficManager 的端口(默认值:8000)。
2. leaderboard_evaluator.py
功能: 设置评估环境(模拟器)并加载代理。
它使用 <agent>.py 中的 get_entry_point() 函数来查找代理类名称,并使用该类创建参与排行榜评估机制的代理。
3. agent.py (以 cilrs_agent.py 为例):
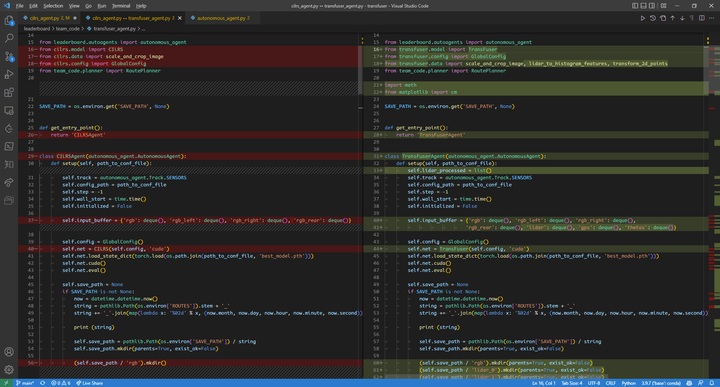
所有代理类都派生自 autonomous agent.Autonomous Agent() 类。 在自己创建 <my_agent>.py 的过程中大多数部分均可以保留 cilrs_agent.py 的写法,仅有少部分如修改传感器之类的内容需要改动。下面是 cilrs_agent.py 与 transfuser_agent.py 的对比图,同一行的左右两边分别出现红色和绿色则表示有改动。
下面将对程序的主要函数进行介绍:
- setup(): # 与 '__init__()' 写法类似,但主要用于设置模型所需的传感器及储存传感器数据的文件路径,传入和模型网络和其预训练参数文件。
- __init(): # 仅用于将导航模块传入 agent。
- sensors(): # 设置 agent 所使用的传感器类型,位置以及参数。
- tick(): # 对传感器的输入数据进行预处理。
- run_step(): # 1. 将传感器的输入数据格式转变为 tensor 并存入 cuda 和缓存中。
# 2. 使用 'net.encoder(data)' 将缓存中的数据传入模型的神经网络中。
# 3. 获取模型输出的动作 'steer', 'throttle', 'brake',以及其他可能需要的信息。
# 4. 该函数会将以上动作 return 到 'leaderboard_evaluator.py' 中。
4. model.py
此部分的内容为 agent.py 中 setup() 的输入,也就是你的模型部分。此部分是项目的核心内容,不同项目之间大不相同,但是大致可以分为以下的几个部分。以 cilrs 模型的图为例:
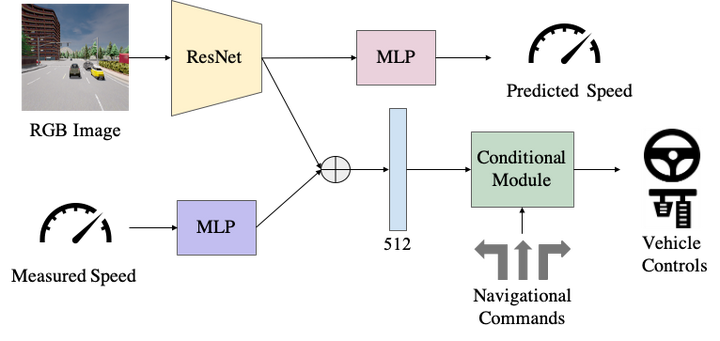
首先是对于输入量,入传感器数据和测量数据进行处理的神经网络,我们叫做 encoder,以及对于处理后的信息进行映射的神经网络,我们叫做 decoder。在自动驾驶中,就是由环境以及车辆自身信息(如速度和导航信息)为输入,到车辆动作为输出的映射模型。
具体是如何实现的,我将在以后的文章中进行讲解。
- 上篇:ADP0. Carla 初体验
- 下篇:
本文使用 Zhihu On VSCode 创作并发布



评论(0)
您还未登录,请登录后发表或查看评论