

目前大多数舵机四足机器人模型造型相比实际的机器人都相差很多,最大的问题就是腿传动方式和舵机尺寸相比机器人腿部太大,使得腿整体很宽难以逼近如spotmini那样的造型,另外足底往往很宽大多以平面或立方体为主。
在步态方面大多机器人主要以简单运动学为主,步态性能较差最大的特点是步频较高,摆动高度很低否则容易摔倒,而且落足点外扩来保证稳定性,而以spotmini为例的高性能四足机器人踏步时落足点都内收,这除了在感官上更接近真实东西外,也能减小侧摆电机扭矩需求,但也对步态算法提出了很高的要求。
为此我之前以丁博士小型电驱动四足机器人为选型设计了moco 12缩比模型,其采用连杆与碳管镂空机架的设计尽可能保证腿够细,足底够小,尽可能地逼近了原始的设计,在步态方面我基于之前提到的伪力控结合倒立摆模型实现了较好的步态控制效果,后面通过论文调研发现这个思想与MIT在LittleDog中应用的框架一脉相承,实现了舵狗里最低0.5s稳定移动步频,较高的抬腿高度,同时也尽可能落足内收。


上述缩比模型我已经开源至github希望其能作为舵狗一个标杆的开发案例和编程平台,控制器采用大疆飞控通用易用的思想,通过上位机配置简单构型参数即可以面相不同尺寸不同腿部构型机器人的快速组装调试,通过sdk能像小车底盘一样进行控制,也可以直接对底层舵机进行驱动,因此采用一个大的机器人能替代目前的SLAM小车来研究足式机器人最大的特点落足点在线规划技术。本帖展示了我使用该平台拓展设计的外膝构型的LS3缩比模型,其单腿按照原始设计结合moco 12已有结构修改

在这个机器人中为保证与原始机器人一致的传动造型,我将连杆下置,通过Solidworks设计了大腿表面的凹槽结构。
为保证造型逼真最终小腿面积仅有6mm对后续算法提出了很高的要求,同时由于采用的是3D打印件最终接触地面可能只有一个点使得高抬腿是对姿态控制的稳定性要求更高,因为该模型腿长相比moco12变短了15%左右即站立高度降低对应虚拟倒立摆高度变低稳定性能下降。

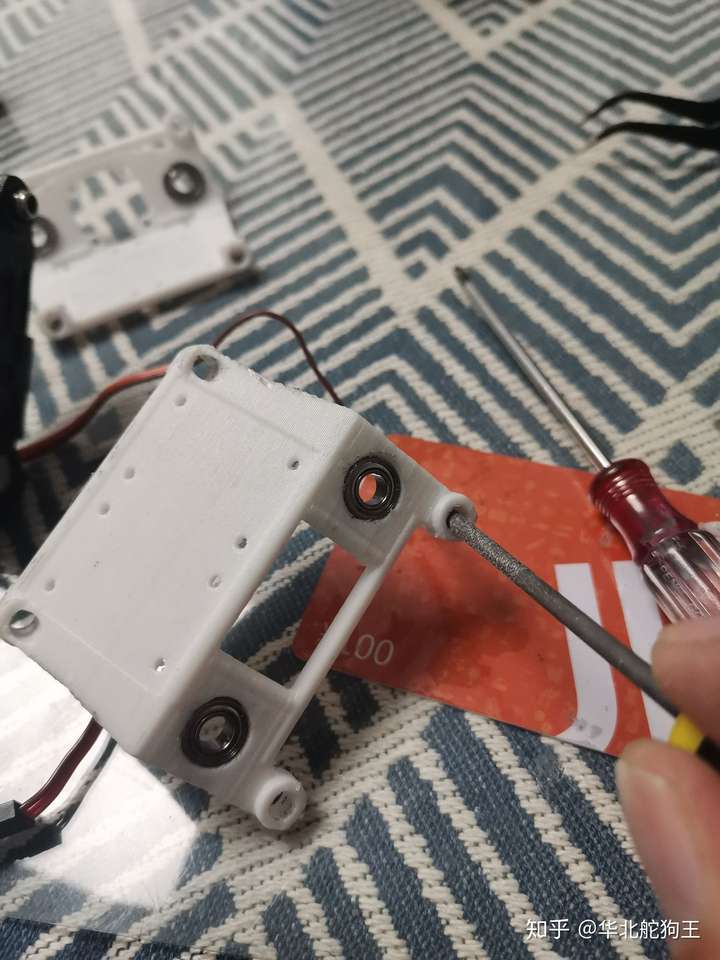
侧摆舵机相比moco12垂直的布置方式修改为水平放置以为LS3原始机身上装留下造型空间,为保证逼真机架连接均采用碳管项目其他舵狗整体打印或者用简单横梁连接的方式无论在造型还是空间应用上都有很大优势,最下方凹槽用于安装18650电池,相比传统航模锂电池基本2节能支持20分钟左右连续行走。

侧摆舵机采用法郎固定保证牢固与美观

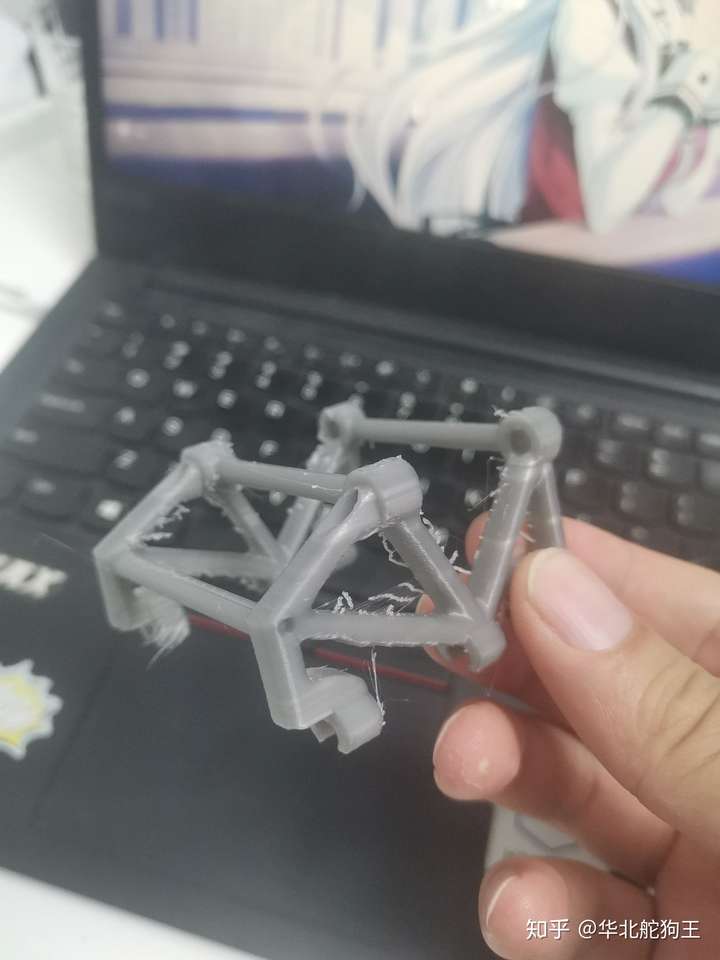
最终单侧腿组装效果去下,基本保证了一比一比例的还原,同时该造型也可用于舵机双足机器人设计

最后将前后固定挡板与单腿组装,使用碳管连接各个部件,完成底盘的组装,进一步设计上装部分来还原LS3的最大特点。

首先设计安装用于固定尾气与消音器的尾部支架结构



之后设计安装用于布置感知导航模组的机头支架

最终还是用碳管固定前后支架,采用卡扣设计安装防摔挡板与其他装饰风扇等结构

最终的安装效果去下


可以看到采用连杆传动的的设计能有效提升舵狗整体造型效果,但大大增大了步态控制难度,现在的模型需要进一步完成细节如排气管,感知头激光雷达的造型,在下一个修正版本需要进一步提高涂装质量增加金属质感,当然最终要的还是与原机器人一致的步态效果,为保证仿真减少舵狗本身的玩具感我还增加了麦克风播放LS3原有发动机的声音。
以上就是新缩比模型简单的设计过程,国外极客在舵狗机构设计方面有许多值得借鉴的地方如采用皮带传动等方式还原spotmini单腿造型



但在步态方面moco12还是有较大优势,希望能作为国内一个优秀机器人和舵狗设计的案例,展示国人创造力也希望能推动国内开源与社区构建这一相比国外差距最大的部分。



评论(1)
您还未登录,请登录后发表或查看评论