

0. 简介
前段时间海龙老哥找我梳理。LIO-SAM中点云配准之角点面点的残差及梯度构建的算法,本人之前都是从算法层面来理解残差问题的。所以这里结合海龙老哥讨论的图形层面来分别看待LIO-SAM残差问题。阅读LIO-SAM源码的时候,发现点线残差和点面残差和雅克比构建采用了LOAM的表示方法。这里我们以电线残差的构建完成从图形和算法层面来看LIO-SAM残差问题。
1. 算法层面代码推导
点线残差的定义为点到线的距离,在该直线上取两个点 A=(x1,y1,z1), B=(x2,y2,z2),设当前点为 P=(x0,y0,z0),如下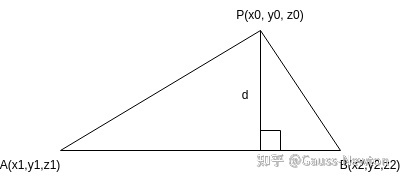
其中我们要计算$d$的话其实只需要计算\triangle{PAB}的面积,除以$AB$的长度即可,即:
\mathrm{d}=\frac{|\mathbf{PA} \times \mathbf{PB}|}{|\mathbf{AB}|}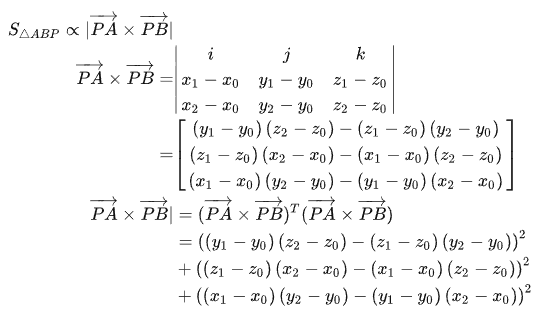
从这里来看,我们就会明白代码中的操作了
// 计算 PA x PB 的模长
float a012 = sqrt(((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1)) * ((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1)) * ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)) * ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)));
// 计算 AB 模长
float l12 = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2)*(y1 - y2) + (z1 - z2)*(z1 - z2));
// P 到 AB 的距离
float ld2 = a012 / l12;
然后下面就是雅克比的推导计算点线雅可比计算。步骤主要分为两步,先对点求导,再对位姿求导:
J=\frac{\partial d}{\partial T_{w b}}=\frac{\partial d}{\partial \boldsymbol{p}^{w}} \frac{\partial \boldsymbol{p}^{w}}{\partial \boldsymbol{T}_{w b}}
其中$d$代表了上式中的三角形高度,可以用上式的模长表示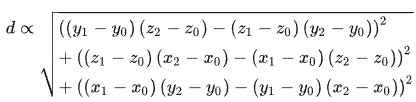
为了更方便表示,可以设置\boldsymbol{p}_{m}=\overrightarrow{P M}=\overrightarrow{P A} \times \overrightarrow{P B},这样既可得: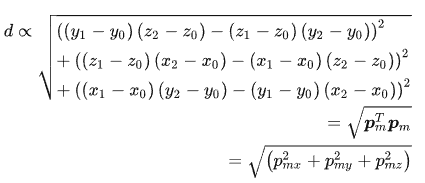
然后下面就是对不同轴进行偏导,并得到\boldsymbol{p}^w=(x0,y0,z0)偏导结果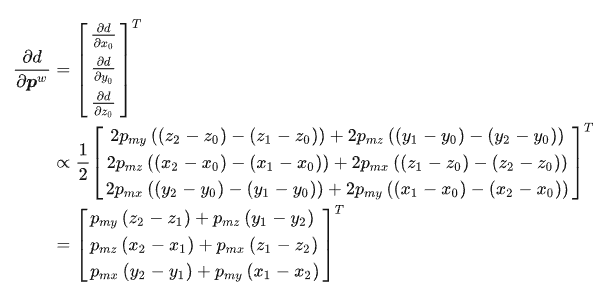
对应代码中,代码中对向量|AB||PM|除是为了进行单位化
// 计算残差对点 P 的雅可比且进行单位化
float la = ((y1 - y2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ (z1 - z2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))) / a012 / l12;
float lb = -((x1 - x2)*((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
- (z1 - z2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
float lc = -((x1 - x2)*((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ (y1 - y2)*((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1))) / a012 / l12;
2. 图像层面代码推导
一开始和我们上面公式层面代码推导一致,其实求的就是\triangle{OAB}面积,以及AB的模长
// 计算 PA x PB 的模长
float a012 = sqrt(((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1)) * ((x0 - x1)*(y0 - y2) - (x0 - x2)*(y0 - y1))
+ ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1)) * ((x0 - x1)*(z0 - z2) - (x0 - x2)*(z0 - z1))
+ ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)) * ((y0 - y1)*(z0 - z2) - (y0 - y2)*(z0 - z1)));
// 计算 AB 模长
float l12 = sqrt((x1 - x2)*(x1 - x2) + (y1 - y2)*(y1 - y2) + (z1 - z2)*(z1 - z2));
// P 到 AB 的距离
float ld2 = a012 / l12;
然后我们同时明白一点,可以就是|\mathbf{OA} \times \mathbf{OB}|代表了面积,但是\mathbf{OA} \times \mathbf{OB}可以则可以看做一个向量,然后向量与向量的计算可以完成方向上模长的计算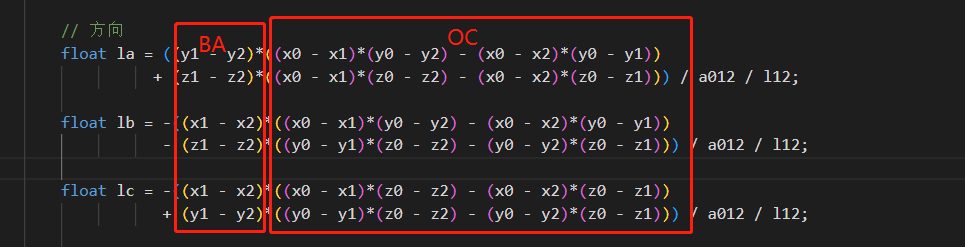
根据上面的代码可以推导出\overrightarrow{B A} \times \overrightarrow{OC}的向量,也就是计算出三个方向上的d残差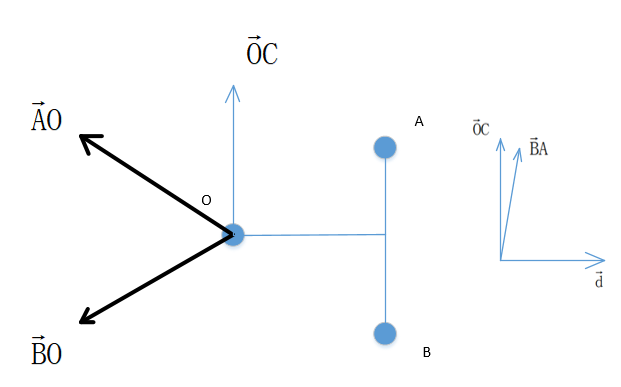
3. 外参处理偏导
在做到这一步后,剩下的就是后半部分\frac{\partial \boldsymbol{p}^{w}}{\partial \boldsymbol{T}_{w b}},这部分主要是点与外参的偏导关系。设 Lidar 相对于世界坐标系旋转矩阵为R ,平移为t ,将 Lidar 坐标系下的点转为世界坐标系的过程为:
\boldsymbol{p}^{w}=\boldsymbol{R} \boldsymbol{p}+\boldsymbol{t}
对平移的推导很简单,即
\frac{\partial \boldsymbol{p}^{w}}{\partial \boldsymbol{t}}=\frac{\partial \boldsymbol{R} \boldsymbol{p}+\boldsymbol{t}}{\partial \boldsymbol{t}}=\boldsymbol{I}
// 用法向量作为雅可比,方向由 pd2 间接决定
coeff.x = s * pa;
coeff.y = s * pb;
coeff.z = s * pc;
coeff.intensity = s * pd2;
//..........即得到
matA.at<float>(i, 3) = coeff.z;
matA.at<float>(i, 4) = coeff.x;
matA.at<float>(i, 5) = coeff.y;
然后下面就是对对旋转的雅可比。LOAM 原作者选择的是 ZXY 外旋(沿固定 Z 轴旋转\rightarrow沿固定 X 轴旋转\rightarrow沿固定 Y 轴旋转)表示,由于外旋的旋转矩阵顺序为作乘,因此 ZXY 内旋的旋转矩阵的计算方式为:R=RyRxRz,同时平移对旋转求导为0,忽略即: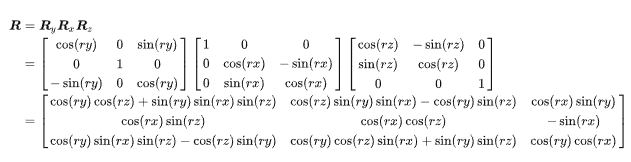
点对rx求雅可比有: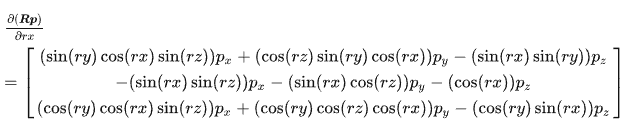
点对ry求雅可比有: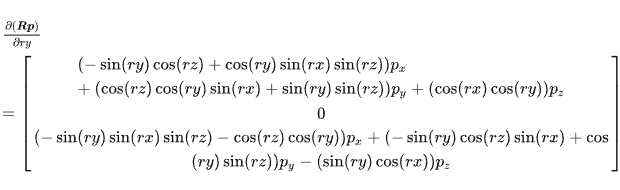
点对rz求雅可比有: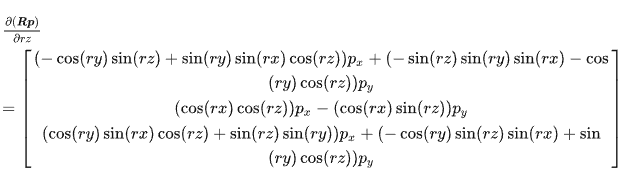
至此雅可比推导完毕,对应的代码如下
float arx = (crx * sry * srz * pointOri.x + crx * crz * sry * pointOri.y - srx * sry * pointOri.z) * coeff.x + (-srx * srz * pointOri.x - crz * srx * pointOri.y - crx * pointOri.z) * coeff.y + (crx * cry * srz * pointOri.x + crx * cry * crz * pointOri.y - cry * srx * pointOri.z) * coeff.z;
float ary = ((cry * srx * srz - crz * sry) * pointOri.x + (sry * srz + cry * crz * srx) * pointOri.y + crx * cry * pointOri.z) * coeff.x + ((-cry * crz - srx * sry * srz) * pointOri.x + (cry * srz - crz * srx * sry) * pointOri.y - crx * sry * pointOri.z) * coeff.z;
float arz = ((crz * srx * sry - cry * srz) * pointOri.x + (-cry * crz - srx * sry * srz) * pointOri.y) * coeff.x + (crx * crz * pointOri.x - crx * srz * pointOri.y) * coeff.y + ((sry * srz + cry * crz * srx) * pointOri.x + (crz * sry - cry * srx * srz) * pointOri.y) * coeff.z;
4. 参考链接
https://blog.csdn.net/qq_32761549/article/details/126641834
https://zhuanlan.zhihu.com/p/548579394



评论(0)
您还未登录,请登录后发表或查看评论