

描述
这个韩国团队真的挺厉害的,在2017年别人提出的GPF算法(已分析)基础上,持续输出。2021年在RAL发表了两篇文章:一篇R-GPF算法(我还没分析),另外一篇是Patchwork(已分析)。今年刚刚刚,也就是2022年7月份又中了一篇IROS,也就是这篇文章:Patchwork++,主要改进了之前提出的Patchwork。
论文思想挺不错的,我来解析一下(同时,定个小目标,年底争取超越他哈哈,希望能实现)
论文:Patchwork++: Fast and Robust Ground Segmentation Solving Partial Under-Segmentation Using 3D Point Cloud
源码链接:https://github.com/url-kaist/patchwork-plusplus
对这种敢开源的,真的是点赞。
Abstract
在使用3D激光雷达的3D感知领域,对于可行驶区域检测及物体识别等各种操作,地面分割都是一项基本任务。地面分割方法有很多,然后都有一些局限性。首先,一些方法需要调参,费时费力。其次,即使参数调整好后,在一些区域出现欠分割,意味着分割失败。最后,当地面在另外一个结构上方时(例如路沿),无法分割出合适的地面。为了解决这些问题,我们提出了一种鲁棒的地面分割算法,叫做Patchwork++,它是Patchwork的升级。Patchwork++基于之前的地面分割结果,利用了自适应地面似然估计(A-GLE)计算合适的参数。此外,临时地面恢复(TGR)利用临时路面属性,可以解决部分的欠分割问题。同时,引入了区域性的垂直平面拟合(R-VPF)来正确分割即使处在不同高度的地面。最后我们提出了基于3D激光雷达反射模型的反射噪声去除(RNR)方法,可以有效的消除虚拟的噪声点。我们使用了SemanticKITTI数据集来做定性和定量的评估。
相对于Patchwork提出了4个新概念:A-GLE、TGR、R-VPF、RNR,理解它们是这篇论文的关键
I. INTRODUCTION
这节简单过一下,主要是讲清楚一些问题
-
地面分割是一种基本任务。
-
基于学习的3D感知存在两个弊端:需要人工标注、训练集和传感器不同时性能有变化。我们专注于非学习的地面分割。
-
通常来说,地面分割只是第一阶段的任务,而分割后的非地面点可以划分为动态点和静态点。地面点则都是静态点。
-
地面分割算法需要满足三个特性:1. 速度快,2. 保证精度和召回率,3. 能够应对不平坦地面
-
一些提出的方法无法满足这些要求,如图所示。我们之前的工作Patchwork能满足这些要求,但偶尔会出现图1(c)中显示的欠分割问题。欠分割问题的原因有两个:一是有些地面分割方法是确定性的;二是最低z值的点被认为是地面,这个假设可能不对。
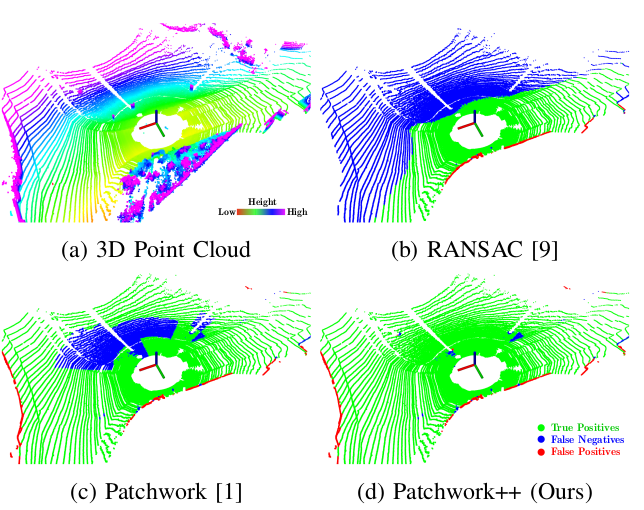
图1显示了RANSAC和Patchwork的问题。(a)图显示了点云数据存在高度变化。RANSAC利用单一平面分割会错误,而Patchwork由于参数是固定的,也存在一些数据点没有被分割成地面。相比之下新的Patchwork++成功分割了
- 因此我们提出了Patchwork来解决这些问题,贡献有三个:
-
A-GLE和TGR减少了FN
-
R-VPF和RNR剔除了噪声点,以防假设不成立
-
SemanticKITTI数据集上的实验结果很好
II. RELATED WORKS
不介绍了
III. PATCHWORK ++: FAST , ROBUST , AND ADAPTIVE GROUND SEGMENTATION(Patchwork++:快速鲁棒自适应的分割)
相较于Patchwork,Patchwork++主要是4个部分:A-GLE、TGR、R-VPF、RNR
关于变化作者给了一个图,很清晰

A. Problem Definition
和Patchwork一样;对地面分割做出数学定义
所有点被分割为了地面点和非地面点,这篇文章还增加了真值的概念。四个元素分别进行交集,就是TP、FP、FN和TN。研究的目标就是,最大化TP,最小化FN和FP。

G是真值地面,N是真值非地面,Ĝ是估计的地面,N̂是估计的非地面,P是全部的数据点。
B. RNR: Reflected Noise Removal(反射噪声去除)
去除反射噪声:去除了距离传感器较近距离的、高度小于某个阈值、强度小于某个阈值的数据点,这些数据点被认为是噪声点
新增参数: 高度阈值h_{noise}(A-GLE中自动更新)、强度阈值I_{noise}(人为设定)
原始点云中,实际地面之下偶尔会有噪声点,下图是噪声点产生的原因。R-GPF算法会选取最低点作为初始点,选到这些噪声点时就会出现欠分割了(真实地面没找到,也就是FN错误拒绝)。
为了解决这个问题,一般是采用拒绝选到z值小于某个阈值的方式。但这种方式是假设地面是平的。当地面是向下的陡坡时,如下图,这种去噪方式就会去除真实地面点。

图(a)中红色的点代表z值比较低。图(b)基于高度去掉了这些点,导致了Patchwork产生了欠分割,如图(c)所示。图(d)是Patchwork++ 的效果,解决了这个问题
因此我们要区分真实地面点和噪声点,只用z值是不行的。文献[25]提出了RNR:
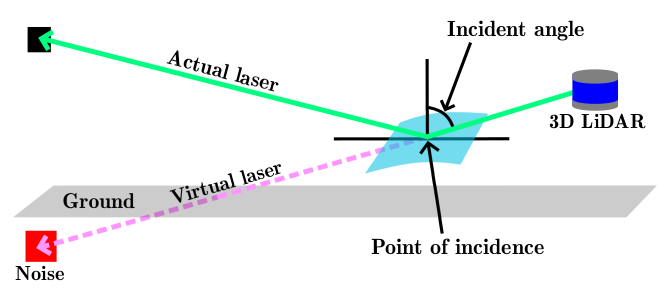
1.虚拟的噪声点,是由于发射得到的,例如汽车发动机罩或者玻璃,如图3所示。入射角越小,得到的噪声越低。因此我们假设,噪声点来源于激光雷达靠下线束的光(入射角更小)。
2.噪声点强度值小。额外的反射会使得虚拟点的强度更小。
因此RNR的做法就是:检查雷达数据的一些底环(线束靠下的,例如128线最下面的10线),去除之中高度小于阈值h_{noise} ,强度小于I_{noise} 的数据点,这些点被认为是强度很大高度又很低的噪声点。高度阈值这个参数,在A-GLE会自动更新。
C. R-VPF: Region-wise Vertical Plane Fitting(区域垂直平面的拟合)
R-GPF平面拟合前,找到每个bin中的垂直点集,使得地面估计会更准确
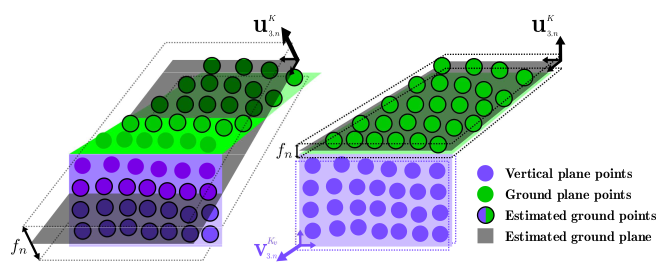
在地面高于一些垂直结构时,R-GPF因为选择了垂直结构中的点作为初始点(因为他们的z值比实际地面点更小),地面估计还是会错误。如图5所示,在当前bin中路沿低于地面,并更靠近传感器。R-GPF选择了墙中的点作为初始点,由于PCA对异常点敏感,所以平面估计错了。
有些人会说,这个高的地面由于可以和另一个地面区分开,而且该地面比正常地面z值大,所以应该不属于地面。但是一些动态的物体,如人类,是可以站在那个地面上的。因此本论文会将这些点,认做地面点。作者说对了,确实会有人反对,我就是反对的这些人之一,以后有机会的话会结合我的理解,给出我的观点。
我们对bin中的点进行预处理,让R-GPF算法拒绝这些垂直的点,以拟合出更准确的平面,我们把这种方法叫做R-VPF。具体的步骤如下:
利用Patchwork中的基于同心区域模型CZM,将点云分为n个bin,第n个bin设为P_n。第n个bin估计出的垂直点V̂_n是经过以下4个步骤得到的:
第1步:首先R-VPF需要经过k次迭代,每次迭代都选择一些z值最低的点,作为种子点。接下来求这些种子点的平均值m^k_n ∈ R^3和单位法向量 v^k_{3,n} ,单位法向量代表这些种子点执行PCA后最小特征值对应的归一化后的单位特征向量。
第2步:第 k 次迭代潜在的垂直平面的点集 Ŵ_{n,k},是在候选点集 P̂^k_n 中采样得到的,公式如下:

式子中在 k=1时(也就是第一次迭代时),P̂_n^k ← P_n(候选点集是第n个bin的全部点)。候选点集是这样确定的:P̂_n^k ← P_n − U_{i=1}^{k-1}V̂_n^i(每次迭代的候选点集,就是用全部点减去,之前迭代出的全部垂直点)。d_v 表示估计的垂直平面的距离margin。
第3步:V̂_n^k代表第k次迭代认为的垂直点集,它的计算公式如下:
式子中u_z 表示z轴方向的单位法向量,也就是[0, 0, 1]^T,θ_v 是估计平面的单位法向量的margin。(种子点的法向量和z轴法向量做点乘,两个单位向量的点乘结果就是夹角的cos值,判断该值与90度的相近程度。在范围内,由这次迭代的种子点找到的垂直点集,可以被认为是垂直点集;否则,这次的垂直点集,不能认为是垂直的)
第4步:最后,累计所有垂直点得到总的垂直点集V̂_n,K_v代表R-GPF的迭代次数
把公式的含义,以举例子的方式说明会简单很多:
假设有100(随机选个数)个bin,每个bin都需要独立估计垂直点。假设我们估计第7(随机选个数)个bin哈,我们先选这个bin里最低的几个点。假设这个bin里有500个点哈,我们选了20个当种子点,算出了这20个点的平均值和单位最小特征向量。第1次迭代,全部的500个点分别去减平均值,通过公式2来计算判断,会得到一些潜在的(不一定是真的)垂直点,假设有70个吧。再将种子点的最小特征向量,与z轴单位向量去做叉乘,由公式3计算判断得到一个结论:20个种子点我到底选对没有?如果选对了,70个点成为了第1次迭代估计出的垂直点,第2次迭代你就得从剩下的500-70=430个点中再选种子点了;如果没选对,这次算没有估计出垂直点,第2次迭代还是从500个点选种子点。
D. A-GLE: Adaptive Ground Likelihood Estimation(自适应地面似然估计)
Patchwork中提出了GLE的方法,利用f (X_n |θ_n )来确定一个区域是地面还是非地面。以下是Patchwork中的公式定义

GLE的概率由三个概率函数相乘组成:以 v_{3,n}为变量的垂直度 ,以z̄ _n 为变量的高度,以 σ_n 为变量的平坦度。具体来说,v_{3,n}是种子点 PCA 中特征值最小的特征向量,z̄ _n 是种子点的均值,σ_n是局部表面变化,它的值σ_n = \frac{λ_{3,n}}{ λ_{1,n}+ λ_{2,n}+ λ_{3,n}} 其中 λ_{1,n} ,λ_{2,n} 和λ_{3,n} 是给定点的 PCA 的特征值,按降序排列。
需要为这个三个函数设置对应的参数,也就是(θ_τ , κ(r_n ), σ_{τ,m} ),来作为垂直度、高度和平坦度的阈值。在Patchwork++中为简单起见,z̄ _n 、σ_n 、κ(r_n ) 和 σ_{τ,m} 表示为 e_n 、f_n 、e_{τ,m} 和f_{τ,m}。
然而,在Patchwork中,根据环境选择最优的参数,尤其是 e_{τ,m} 和 f_{τ,m}非常耗时。在图 6 中,真实地平面的高度和平坦度值的分布似乎因周围环境而异。因此不同的环境,参数需要进行调整。
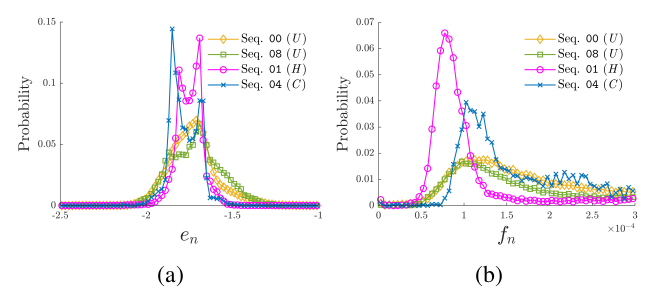
序列00、01、04、08的CZM第一环真实地面点的平均高度e_n和平坦度f_n的概率分布。序列 00 和 08 有着相似的分布,相反,序列 01 和 04 是完全不同的分布。 U、H 和 C 分别表示城市、高速公路和乡村场景。
横坐标为真实地面点平均高度和平坦度的值,纵坐标为对应值的数据帧占全部数据帧数的百分比
为了解决这个问题,A-GLE的思想就是自适应的调整参数e_{τ,m}和f_{τ,m}。除非初始值设置的太过异常,A-GLE都能正确的更新参数。除此之外,之前提到的RNR(噪声去除)的高度阈值h_{noise}也是由A-GLE更新的。
Elevation(高度)
高度的参数自动更新,我们提出一个新颖的概念:明显地面(definite ground)D_m。它代表CZM模型第m个环满足垂直度和高度条件的平面(已经满足了Patchwork的垂直度和高度,但还没有考虑平坦度)。A-GLE要采用明显地面的特性,来更新高度参数,以进行下一次估计
令E_m是明显地面D_m中e_n的集合(也就是平均高度值的集合),基于E_m,e_{τ,m}的更新公式如下:

式子中mean(.)代表集合的平均值,stdev(.)代表集合的标准差。a_m>0代表为CZM模型第m环中标准差,给的一个固定增益(固定乘这个值)。
A-GLE的高度自适应更新:对于高度阈值参数,相对于Patchwork的固定值,Patchwork++是在不断更新的
Flatness(平坦度)
在更新平坦度参数f_{τ,m}之前,我们发现Patchwork的计算有潜在问题。上面说到,平坦度是f_n= \frac{λ_{3,n}}{ λ_{1,n}+ λ_{2,n}+ λ_{3,n}} 这样计算的。那么为了使这个平坦值有意义,无论地面与雷达的相对位置如何,对于同一地面该值必须是恒定的。
挺好理解的,Patchwork的问题就是:平坦度计算出的是当前bin的数据经过PCA后的三个特征值,特征值也好或者特征向量也好,我们希望它们是反映世界坐标系下的三维特征的,而Patchwork计算出的特征是在雷达坐标系下的。雷达xy平面如果没有与地面平行呢?又或是运行中雷达意外歪了呢?
但不幸的是,由于Patchwork利用了CZM模型,地面被分为了若干bin。地面被划分成了不同的形状和大小。那么,即使整体的地面没有改变,特征值 λ_{1,n}和 λ_{2,n}也可能发生了变化。因此有人会说,由于潜在的不一致性,这样计算的平坦度f_n是不合逻辑的。为了解决这个问题,Patchwork++设置平坦度为f_n = λ_{3,n},也就是表面的法向量。
看Patchwork论文时关于平坦度的计算我没有深究,Patchwork++这会儿提到我才关注。设置平坦度为最小特征值,这简直是显而易见的啊,我在点云识别物体的很多代码中,也只是使用了最小特征值,而不是全部特征值组合的关系。从这点来看,Patchwork用错了,而Patchwork++仅仅是纠正了这一错误,这一点算不得改进。
与 e_{τ,m} 类似,f_{τ,m} 也是根据 A-GLE 的 D_m 分布进行了更新。令 F_m 为 明显地面D_m 中所有 f_n 的集合。然后,f_{τ,m} 可以更新如下:

式子中b_m>0代表为CZM模型第m环中标准差,给的一个固定增益(固定乘这个值)。
Noise Removal Height(噪声去除高度)
A-GLE还要更新一下噪声高度阈值h_{noise},用于去除较近环中出现的噪声点。

其中δ < 0代表噪声去除的一个范围边界值。E_1之前说过了,代表最近环中数据点z值的集合。
相当于,统计了最近环数据点的z值,求了一个平均值,再减去一个固定小值)
E. TGR: Temporal Ground Revert(暂时的地面还原)
通过参数可以自适应更新的A-GLE后,我们成功估计出了地面。然而,一个 bin 内的一些不寻常的地面点,不满足参数的条件。例如,有草的崎岖地形,可能相比自动更新的参数(平均高度e_n 和 平坦值f_n),值更大。这是因为 A-GLE会随着时间的推移根据所有的值,来更新参数。A-GLE可能会起到一个低通滤波的作用,如果一个bin的平坦度暂时比较大,那这个bin这次可能很难被估计为地面了。 A-GLE中的参数自更新,你会发现高度和平坦度都使用了平均值作为基础,那么显然可能会漏检一些值偏大的bin
为了解决这个问题, 我们提出了TGR,利用这个bin仅在时间t时是明显路面D_m^t,将欠分割的路面恢复成路面。换句话说,TGR会将每个欠分割的bin的平坦度f_n,与t时刻的平坦度阈值f^t_{τ,m}进行比较,计算公式如下:

c_m代表CZM第m个环的标准差的常数增益,F_m^t是D_m^t中平坦度f_n的集合。因此,在被拒绝的地面点(其平坦度f_n大于平坦度阈值f_{τ,m}的)中,如果平坦度满足f_n<f_{τ,m}^t,这些被拒绝的地面可以恢复成地面。
理解公式6与公式8的区别是核心关键。假设我们在第99帧去完成A-GLE的计算,那么公式6计算出来的平坦度阈值,是要用在第100帧的计算的,而公式8的意思(也就是TGR的核心)就是,当前第99帧计算第2个平坦度阈值,用这个新阈值,可以将被第99帧第1个阈值拒绝掉的一些bin重新恢复为地面
Patchwork++总的流程图
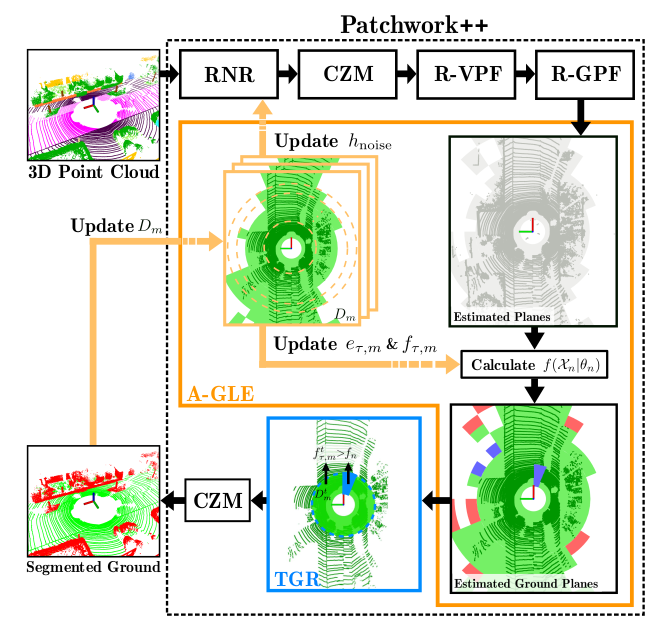
前面把整个Patchwork++讲的挺清楚了,这里再结合总的流程图快速梳理一下:
给定了数据
- 先利用噪声阈值,去除噪声(RNR)
- 再对全部数据进行CZM分区
- 对每个分区,利用R-VPF去除可能对拟合平面产生干扰的垂直点
- 接下来对每个分区进行R-GPF地面拟合
- 综合考虑垂直度、高度、平坦度,得到一个总概率进行bin级的地面分割
- 利用TGR恢复一些被平坦度阈值拒绝的bin
- 得到最终结果
- 最终结果结合提出的A-GLE,更新一下算法中使用的阈值,进行新一次的地面估计
总结
这篇文章很好的讲解了Patchwork++,从论文内容上我认为我已经100%理解了作者的意图,当然了他的代码已经在我手里了,接下来会看他的源码。Patchwork++的实验效果,我再考虑是否有时间进行分析把。
总的来说,作者利用了LineFit和GPF的思想,发表了R-GPF、Patchwork的方法,这次又对自己的工作进行了有效的改进,值得肯定。

评论(11)
您还未登录,请登录后发表或查看评论