

1. 机械臂与四足机器人
如果你没看过波士顿动力Spotmini最新的机械臂应用视频那可以查看以下链接,四足机器人目前最大的问题是落地应用不明确,而增加机械臂实现更多应用场景的方案已经是目前四足机器人产业未来最大的特点,已知有增加过机械臂相关四足机器人有Spotmini,绝影,GhostRobotics等,而Spotmini应当是这个应用领域的先驱。

早在2年前Raibert在很多展会上就演示过Spot搭载机械臂的相关应用,除了能帮助机器人自恢复外还能基于视觉夹取杯子等物品,另外其结合机体本体运动下的全局鸡头稳定技术也被当时很多视频爱好者恶搞,而新一代的Spotmini不但能实现开门这样复杂的臂足协调控制,基于稳定的步态和精确的定位在视频末尾Spotmini手持臂在地面上写出的Boston Dynamics的涂鸦,就个人观点来说我觉得这个功能演示可以说是整个视频中难度最高的。

综上,总结一下对搭载机械臂的一点简单分析,首先机械臂在机械设计上需要具有6自由度以上才能较好地实现不同角度下对目标的抓取,另外机械臂需要具有质量轻的要求,否则对机器人载重和机头方向配重都有较大影响,另外在保证质量的前提下还要要求机器人末端有一定的负载抓取能力比如2Kg起步,同时在软件控制方面由于四足机器人是浮动基座,机械臂的运动会对机器人姿态造成影响,对于四腿站立来说还算简单,但对于Trot等步态运动下的机械臂控制难道就很大了,除了要稳定末端在全局的机头位置外,还需要克服机械臂抓取对机体带来的扰动,因此这个方向除了有很直接的工程应用需求外,在算法和控制理论上也具有很大的研究意义,这和无人机也比较类似基本的运动控制研究完了之后很多无人机论文就是在平台上加自由度在研究控制问题!!
2. Moco Arm六自由度机械臂
因此,下面基于Moco-12机器人来设计一个简单的6自由度机械臂并在上面开展一些简单的算法设计,形成一个简单的足臂多自由度控制的软件框架,并在上面模仿Spotmini实现抓取、开门、机头移动稳定等几个特色功能,当然由于使用的是舵机只能实现运动学层面的验证,但是现阶段能在一个机器人实物上实现运动学层面机头稳定也已经很难了,本教程最终设计的机械臂示意图如下:

如上图所示,考虑Moco-12本身尺寸较小很难使用淘宝上现成的机械臂,因此定制设计了一个并联机构的6Dof机械臂,其由一个3Dof并联机械臂和3Dof机械爪组成,考虑舵机尺寸和输出轴结构约束机械臂采用并联结构,使用3个9g总线舵机,而机械臂为减小尺寸保证整体比例造型美观使用了3个2.4g的PWM舵机,机械臂整体机构参数如下表所示:

3. 机械臂简单安装教程
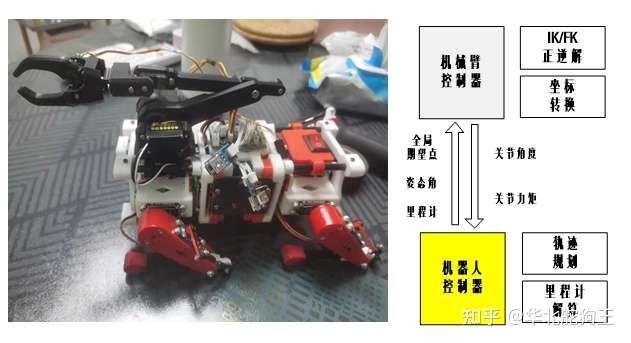
机械臂相应的加工文件可以从如下的项目中进行下载,目前机械臂采用3D打印完成所有结构的加工,总线舵机使用飞特9g总线舵机,PWM舵机俯仰轴使用EMAX 4g迷你舵机,其他采用2.4g 迷你舵机,整体供电为5V使用定制的控制电路板驱动,并最终通过串口与主控制器进行通讯控制,主控制器发送本体姿态和里程计数据给机械臂,机械臂结合期望全局位置规划逆解,输出最终的角度控制结果,综上虽然基于舵机我们也能搭建一个完整的足臂协调控制软硬件框架,并以小见大将其二次扩展、优化最终应用在真实的四足机器人系统中,因此Moco Arm的基本软件框架如下图所示:
(1)下面给出简单的安装过程,首先完成总线舵机舵盘与大臂、小臂和旋转底座的固定:

(2)使用螺丝固定舵盘并将反面多余的尖头去除

(3)将底盘总线舵机与底座组合安装

注:组合完成后需要修改其舵机ID为2并将其复位到零位
(4)按机械装配图,安装大小臂两个舵机,并安装并联连杆

注:完成后需要修改大臂舵机ID为4,小臂舵机ID为3,另外同样需要标定好角度
(5)按机械装配图,安装俯仰轴舵机、横滚舵机

(6)按机械装配图,安装机械爪

(7)最终将机械爪固定在横滚舵机上

本章主要介绍Moco Arm基本的结构参数,相应打印文件已经开源在Github上:




评论(0)
您还未登录,请登录后发表或查看评论