

课程目的
本课程是基于《四足机器人控制与仿真入门》的基础上的拓展课程。
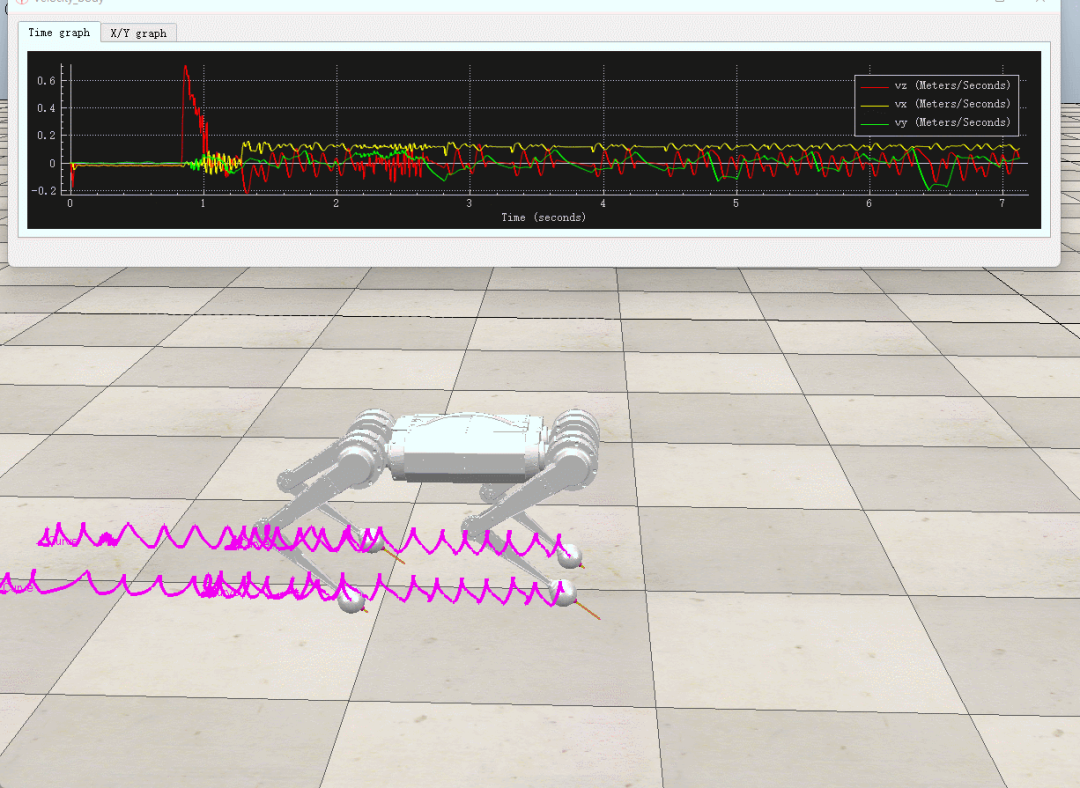
课程采用Coppeliasim作为四足机器人仿真平台,Matlab作为编程语言,实现二维空间中VMC算法的仿真应用。通过此课程,大家可以更加深入的掌握Coppeliasim这款仿真软件,同时实现基于施加关节力矩的四足机器人控制方式。

课程内容
本课程共七节内容,课程总时长为2小时,让大家在课程的引导下实现四足机器人的VMC算法仿真,培养独立思考和解决问题的能力,因此此次课程不会每个细节都讲解到。
-
第一节内容是对此次课程的一个总览。
-
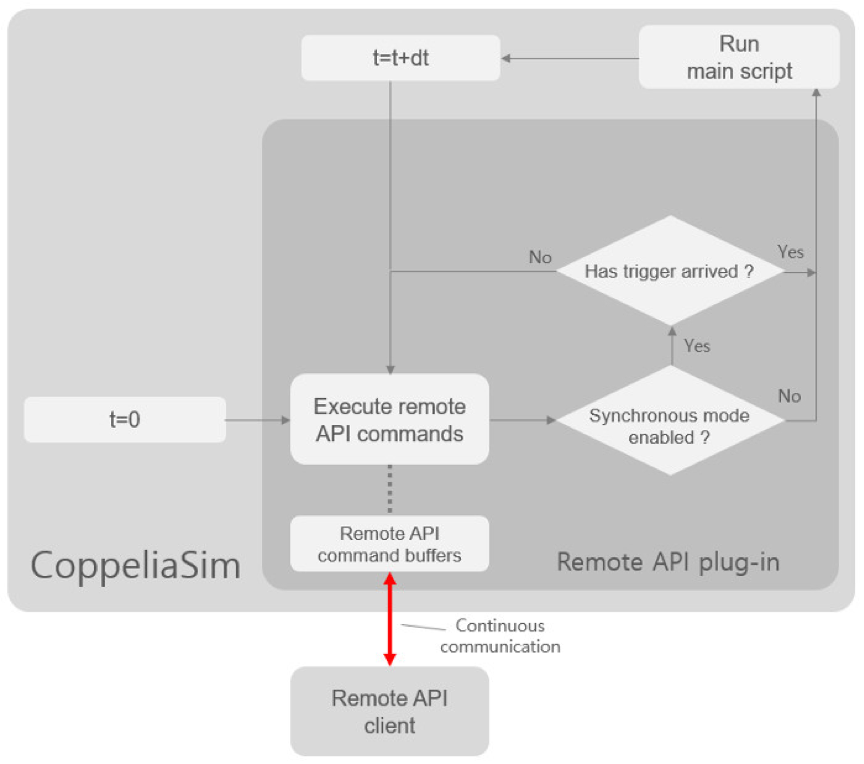
第二节内容是对Coppeliasim功能的进一步拓展,深入介绍其通信模式,解析远程API控制物理引擎的执行模式。同时也对软件中力矩控制的实现做一个讲解。
-
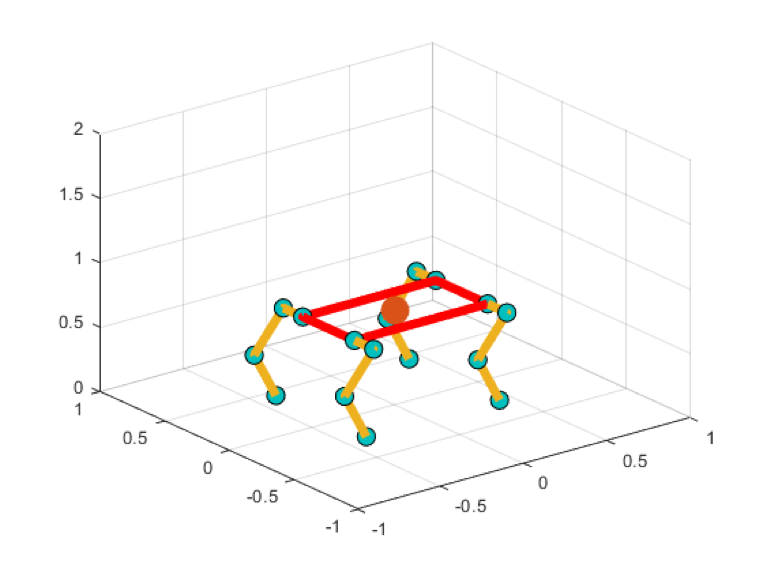
第三节内容是推导四足机器人单腿的正运动学与雅可比矩阵的计算,包括二自由度和三自由度的代码推导验证。
-
第四节内容是分析VMC算法的原理,分别对单腿摆动相和支撑相的VMC控制策略进行推导。
-
第五节内容介绍了Crawl步态和Trot步态的时序控制流程,即机器人的状态机运行机制。
-
第六节内容对仿真代码进行分析,首先介绍了代码的总体框架,然后对代码细节进行讲解,包括状态机实现、摆动相轨迹规划、触地检测、力矩计算等功能。
-
第七节内容首先是对Coppeliasim通信模式拓展部分的讲解,然后提供了一个webots中的VMC算法单腿摆动相测试仿真demo,最后简要介绍了三维空间中的VMC算法实现方式。

其他课程
《四足机器人控制与仿真入门 • 阳炼》
https://class.guyuehome.com/detail/p_605af87be4b007b4183a42e7/6
课程目录
|
1.四足机器人VMC算法仿真实现课程总览 2.Coppeliasim重要功能讲解 2.1 Coppeliasim的阻塞通信、同步通信 2.2 Coppeliasim的力矩控制实现 2.3 其他可能遇到的小技巧与注意事项 3.四足机器人单腿的正运动学与雅克比矩阵推导 3.1 单腿正运动学 3.2 雅克比矩阵求解 4.VMC算法原理解析 4.1 摆动相VMC原理 4.2 支撑相VMC原理 5.步态时序分析 5.1 Crawl步态时序 5.2 Trot步态时序 6.仿真代码分析 6.1 代码总体架构 6.2 时序控制 6.3摆动相轨迹规划 6.4触地检测、力矩计算 7.总结与展望 7.1 Coppeliasim通信模式拓展 7.2 webots中的VMC算法单腿摆动相测试仿真 7.3 三维空间中的VMC算法实现方式展望 |
*课程资料在微信公众号“古月居”后台回复“仿真控制资料”获取
温馨提示
本课程购买后2年内可以免费观看。
适用人群
1 、学习本课程前建议先学习四足机器人控制与仿真入门,了解Coppeliasim的基本操作。
2.、具有MATLAB编程基础,具有一定的机器人学知识,对足式机器人控制感兴趣的人群。
课程试看
课程原价¥59.8
两人拼团¥29.8,三人拼团¥26.8
现上新价更优惠~
前100名购买还可以领取一张5元优惠券
【每人限领一张,仅限本课程使用】
领取优惠券后15天内有效
两种领取方式如下所示:
1.扫码领取优惠券


扫码后效果图
2.商品详情页领取

如何使用:




评论(0)
您还未登录,请登录后发表或查看评论