

GAAS学习(一)Offboard基本控制
开源项目GAAS:
https://github.com/generalized-intelligence/GAAS
一、确保环境安装配置完成
ROS
Firmware
Mavros
Gazebo
及相关依赖
修改环境变量bashrc
sudo gedit ~/.bashrc
添加如下内容
source ~/Firmware/Tools/setup_gazebo.bash ~/Firmware/ ~/Firmware/build/posix_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/Firmware/Tools/sitl_gazebo
检测:
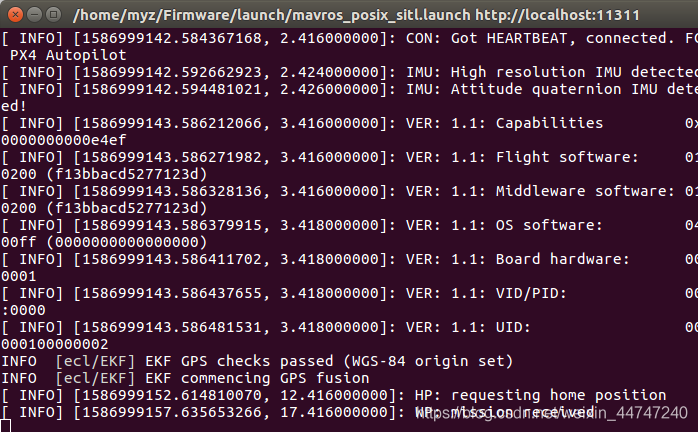
出现如下界面,即环境没有问题
roslaunch px4 mavros_posix_sitl.launch
 查看当前mavros状态
查看当前mavros状态
rostopic echo /mavros/state
其中 connected为 True,为连接成功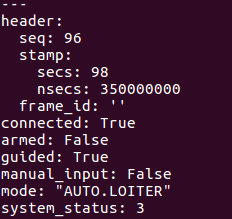
二、使用Gaas相关代码
git clone git@github.com:generalized-intelligence/GAAS.git
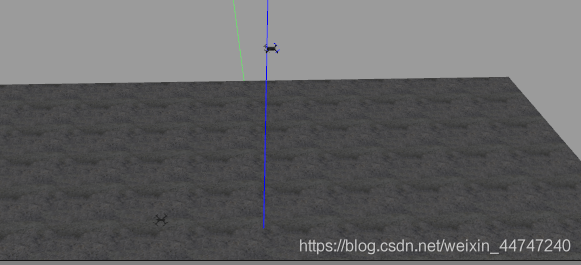
运行px4_mavros_run.py,起飞3m
python px4_mavros_run.py
主要部分代码如下:
def start(self):
#初始化节点
rospy.init_node("offboard_node")
#等待
for i in range(10):
if self.current_heading is not None:
break
else:
print("Waiting for initialization.")
time.sleep(0.5)
#设置起飞高度、偏航
self.cur_target_pose = self.construct_target(0, 0, self.takeoff_height, self.current_heading)
#print ("self.cur_target_pose:", self.cur_target_pose, type(self.cur_target_pose))
#不停发布,解锁,模式offboard
for i in range(10):
self.local_target_pub.publish(self.cur_target_pose)
self.arm_state = self.arm()
self.offboard_state = self.offboard()
time.sleep(0.2)
#起飞判断检测
if self.takeoff_detection():
print("Vehicle Took Off!")
else:
print("Vehicle Took Off Failed!")
return
'''
main ROS thread
'''
#解锁状态、offboard状态、ros未杀死
while self.arm_state and self.offboard_state and (rospy.is_shutdown() is False):
#起飞到设定位置
self.local_target_pub.publish(self.cur_target_pose)
#模式land并高度小于0.15,上锁
if (self.state is "LAND") and (self.local_pose.pose.position.z < 0.15):
if(self.disarm()):
self.state = "DISARMED"
time.sleep(0.1)
运行commander.py
向右飞一米
逆时针旋转90度
降落
# -*- coding: utf-8 -*-
import rospy
from mavros_msgs.msg import GlobalPositionTarget, State
from mavros_msgs.srv import CommandBool, CommandTOL, SetMode
from geometry_msgs.msg import PoseStamped, Twist
from sensor_msgs.msg import Imu, NavSatFix
from std_msgs.msg import Float32, String
from pyquaternion import Quaternion
import time
import math
class Commander:
def __init__(self):
rospy.init_node("commander_node")
rate = rospy.Rate(20)
self.position_target_pub = rospy.Publisher('gi/set_pose/position', PoseStamped, queue_size=10)
self.yaw_target_pub = rospy.Publisher('gi/set_pose/orientation', Float32, queue_size=10)
self.custom_activity_pub = rospy.Publisher('gi/set_activity/type', String, queue_size=10)
#俯仰滚转升降,按照bodyemu
def move(self, x, y, z, BODY_OFFSET_ENU=True):
self.position_target_pub.publish(self.set_pose(x, y, z, BODY_OFFSET_ENU))
#偏航设置
def turn(self, yaw_degree):
self.yaw_target_pub.publish(yaw_degree)
#降落模式
def land(self):
self.custom_activity_pub.publish(String("LAND"))
#悬停模式
def hover(self):
self.custom_activity_pub.publish(String("HOVER"))
#返回模式
def return_home(self, height):
self.position_target_pub.publish(self.set_pose(0, 0, height, False))
#位置设置
def set_pose(self, x=0, y=0, z=2, BODY_FLU = True):
pose = PoseStamped()
pose.header.stamp = rospy.Time.now()
# ROS uses ENU internally, so we will stick to this convention
if BODY_FLU:
pose.header.frame_id = 'base_link'
else:
pose.header.frame_id = 'map'
pose.pose.position.x = x
pose.pose.position.y = y
pose.pose.position.z = z
return pose
if __name__ == "__main__":
con = Commander()
time.sleep(2)
con.move(1, 0, 0)
time.sleep(2)
con.turn(90)
time.sleep(2)
con.land()
")


评论(0)
您还未登录,请登录后发表或查看评论