

写在前面
再过2个小时,就是2020年了,回顾2019,有得也必有失,只感叹时间过得真的很快,像我这样的贫困人口也要被消灭了,哈哈。2019最后这2个小时就用一篇博客作为结尾吧。
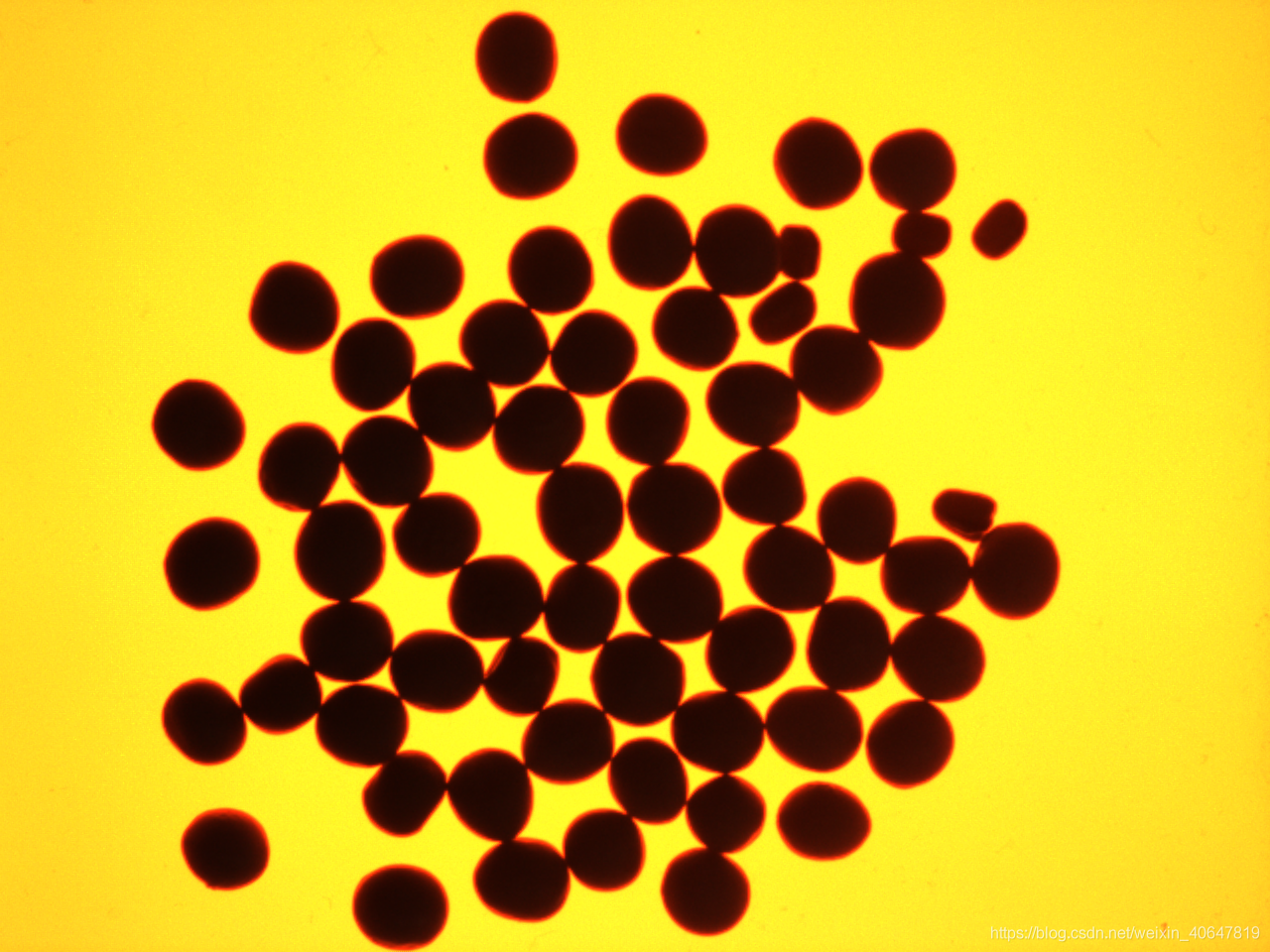
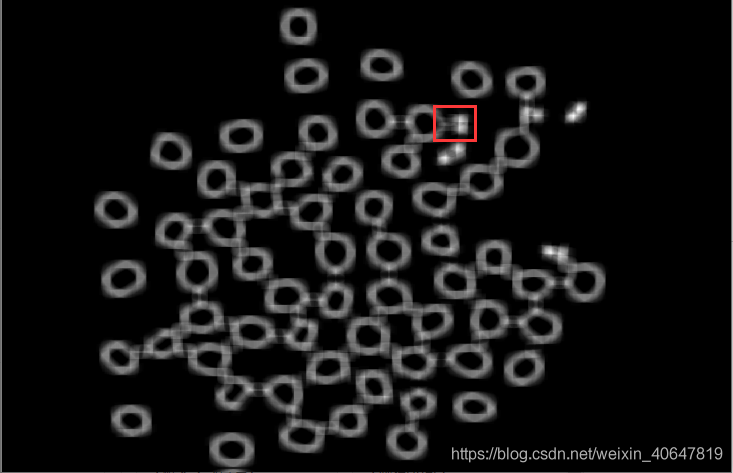
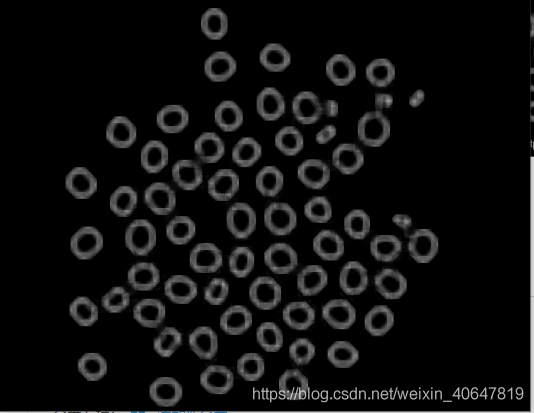
昨天CSDN上一位同学说他们要做一个豆子识别的任务,但是豆子之间的粘连比较严重,如下图,不利于豆子的识别,问我有什么方法可以解决,当然深度学习完全可以做到完美分割与识别,但是他的需求只是预处理,传统的图像处理就可以,所以这里只讨论传统方法。

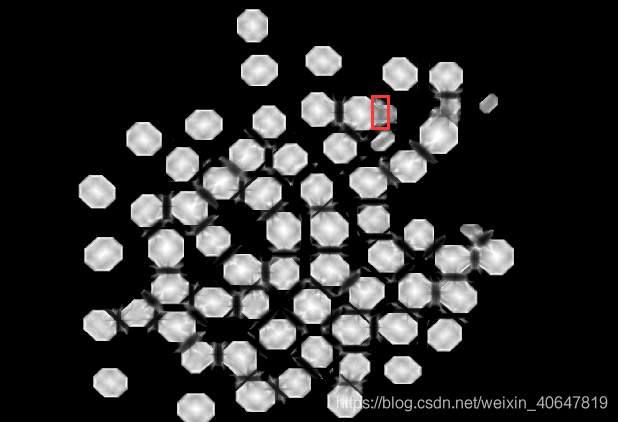
看二值图,确实有些地方粘连挺严重,如红色框展示的地方。如果用形态学腐蚀,开运算,可以解决占粘连,但是会严重影响豆子本身的尺寸信息,所以这个问题还是很有趣的,值得探索一下。
灰度方向统计滤波
观察二值图,我最直接的感受就是粘连处相对豆子本身是比较细小的,假设二值图豆子及粘连处为1,那么就存在一个特点:粘连处总有一个方向为1的个数很少。所以我就分别统计二值图中一个滤波窗口内4个方向为1的个数,然后以 最小值/最大值 作为滤波结果,就叫它:灰度方向统计滤波吧。
这样的好处就是豆子本身最小值/最大值的比值相对很大,甚至为1,而粘连处则一定会很小;不足之处就是像二值图中红色框中粘连过大,甚至和小的豆子的尺寸快一样了,那这样的处理就不那么如意了。
我最后的结果是这样的:
可以看到绝大部分的粘连已经被消除,然后红色框中粘连过大的地方依然没有消除。所以还必须施加某种约束以优化效果。
梯度方向统计滤波
再次观察二值图,发现粘连很大的地方其内部的梯度是为0的,这就恰好就是我需要的结果,但是需要考虑的是:豆子内部的梯度也是为0的。所以如果直接计算梯度,结果只是提取了边缘,相当于Canny边缘检测的第二步,这不是我想要的结果。
那如何保证只抑制粘连处,而不抑制豆子呢(尤其是小的豆子)?
观察二值图,可以发现,粘连处的边缘远远少于豆子的边缘。所以又会有一个特征:在一定滤波尺寸内,粘连处满足一定梯度方向要求的像素一定也远远少于豆子(因为只有边缘存在梯度)。
所以我只要统计滤波窗口内满足一定梯度方向要求的像素,然后将它们梯度幅值的均方或平均作为滤波结果即可,就叫它:梯度方向统计滤波吧。
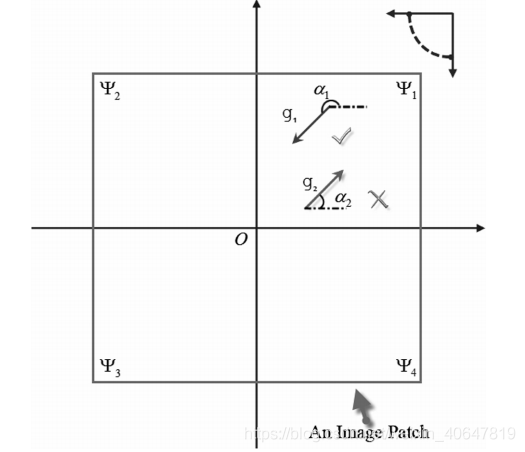
上面的图是一篇论文的,我就借鉴一下吧,将滤波窗划分为4个象限,然后。。。,唉,实在不想打字画图了,直接简单地写在纸上吧:
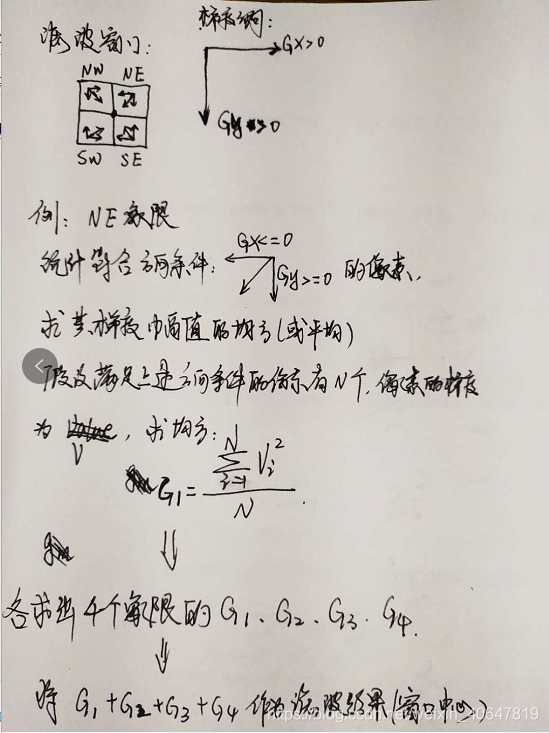
请忽略字,太丑,赶紧写完回去睡觉了。
结果还是可以的:既抑制了粘连部位,又保住了豆子,如红色框处。
结果
那就把两者的结果的优点结合一下吧,两个滤波结果相乘:完美解决!
代码
LIG.h:
#ifndef LIG_H
#define LIG_H
/*************************************************************************************
/编译会出现重定义的报错,运行时请将属性管理器连接器中的强制文件输出改为【Enabled (/FORCE)】
*************************************************************************************/
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
class LIG{
public:
cv::Mat Calc_Imap(cv::Mat src, int wsize); //src必须为8位无符号整型图像
cv::Mat Calc_Gmap(cv::Mat src, int wsize);
void Calc_LIG(cv::Mat src, cv::Mat &Imap, cv::Mat &Gmap, cv::Mat &IGmap,int wsize, double k);
private:
inline cv::Mat get_filter0(int s);
inline cv::Mat get_filter45(int s);
inline cv::Mat get_filter90(int s);
inline cv::Mat get_filter135(int s);
void Nozerosfilter(cv::Mat src, cv::Mat &dst, cv::Mat &filter);
inline double Mean_surround(cv::Mat &src);
inline cv::Mat get_NW_data(cv::Mat &src, int ROI_center);
inline cv::Mat get_NE_data(cv::Mat &src, int ROI_center);
inline cv::Mat get_SW_data(cv::Mat &src, int ROI_center);
inline cv::Mat get_SE_data(cv::Mat &src, int ROI_center);
void Calc_gradient(cv::Mat img, cv::Mat_<double> &Gx, cv::Mat_<double> &Gy);
};
inline cv::Mat LIG::get_filter45(int s){
cv::Mat dst = cv::Mat::zeros(s, s, CV_8U);
for (int i = 0; i < s; ++i){
dst.at<uchar>(i, s - i - 1) = 1;
}
return dst;
}
inline cv::Mat LIG::get_filter135(int s){
cv::Mat dst = cv::Mat::zeros(s, s, CV_8U);
for (int i = 0; i < s; ++i){
dst.at<uchar>(i, i) = 1;
}
return dst;
}
inline cv::Mat LIG::get_filter0(int s){
cv::Mat dst = cv::Mat::zeros(s, s, CV_8U);
for (int i = 0; i < s; ++i){
dst.at<uchar>((s - 1) / 2, i) = 1;
}
return dst;
}
inline cv::Mat LIG::get_filter90(int s){
cv::Mat dst = cv::Mat::zeros(s, s, CV_8U);
for (int i = 0; i < s; ++i){
dst.at<uchar>(i, (s - 1) / 2) = 1;
}
return dst;
}
void LIG::Nozerosfilter(cv::Mat src, cv::Mat &dst, cv::Mat &filter){
filter2D(src, dst, -1, filter, cv::Point(-1, -1), 0);
}
inline double LIG::Mean_surround(cv::Mat &src){
double sum = 0.0, mean = 0.0;
size_t mid = (src.total()) / 2;
cv::MatIterator_<double> it = src.begin<double>();
cv::MatIterator_<double> it_end = src.end<double>();
cv::MatIterator_<double> it_mid = it + mid;
for (; it != it_end; ++it){
if (it != it_mid)
sum = sum + *it;
}
mean = sum / (src.total() - 1);
return mean;
}
inline cv::Mat LIG::get_NW_data(cv::Mat &src, int ROI_center){
cv::Rect area(0, 0, ROI_center + 1, ROI_center + 1);
cv::Mat NW_data = src(area);
return NW_data;
}
inline cv::Mat LIG::get_NE_data(cv::Mat &src, int ROI_center){
cv::Rect area(ROI_center, 0, ROI_center + 1, ROI_center + 1);
cv::Mat NE_data = src(area);
return NE_data;
}
inline cv::Mat LIG::get_SW_data(cv::Mat &src, int ROI_center){
cv::Rect area(0, ROI_center, ROI_center + 1, ROI_center + 1);
cv::Mat SW_data = src(area);
return SW_data;
}
inline cv::Mat LIG::get_SE_data(cv::Mat &src, int ROI_center){
cv::Rect area(ROI_center, ROI_center, ROI_center + 1, ROI_center + 1);
cv::Mat SE_data = src(area);
return SE_data;
}
void LIG::Calc_gradient(cv::Mat img, cv::Mat_<double> &Gx, cv::Mat_<double> &Gy){
cv::Mat_<double> dImg;
img.convertTo(dImg, CV_64F);
int rows = img.rows;
int cols = img.cols;
cv::Mat_<double> xTopVec = dImg.col(1) - dImg.col(0);
cv::Mat_<double> xBotVec = dImg.col(cols - 1) - dImg.col(cols - 2);
cv::Mat_<double> xForwMat = dImg(cv::Range(0, rows), cv::Range(0, cols - 2));
cv::Mat_<double> xBackMat = dImg(cv::Range(0, rows), cv::Range(2, cols));
cv::Mat_<double> centGx = (xBackMat - xForwMat) / 2;
cv::Mat_<double> tmpGx = cv::Mat::zeros(rows, cols, CV_64F);
for (int i = 1; i < cols - 1; i++) {
centGx.col(i - 1).copyTo(tmpGx.col(i));
}
xTopVec.copyTo(tmpGx.col(0));
xBotVec.copyTo(tmpGx.col(cols - 1));
cv::Mat_<double> yTopArr = dImg.row(1) - dImg.row(0);
cv::Mat_<double> yBotArr = dImg.row(rows - 1) - dImg.row(rows - 2);
cv::Mat_<double> yForwMat = dImg(cv::Range(0, rows - 2), cv::Range(0, cols));
cv::Mat_<double> yBackMat = dImg(cv::Range(2, rows), cv::Range(0, cols));
cv::Mat_<double> centGy = (yBackMat - yForwMat) / 2;
cv::Mat_<double> tmpGy = cv::Mat::zeros(rows, cols, CV_64F);
for (int i = 1; i < rows - 1; i++) {
centGy.row(i - 1).copyTo(tmpGy.row(i));
}
yTopArr.copyTo(tmpGy.row(0));
yBotArr.copyTo(tmpGy.row(rows - 1));
Gx = tmpGx;
Gy = tmpGy;
}
#endifLIG.cpp:
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include "LIG.h"
cv::Mat LIG::Calc_Imap(cv::Mat src, int s){
if (s % 2 == 0){
fprintf(stderr, "Please enter odd size!");
exit(-1);
}
if (src.channels() > 1) cvtColor(src, src, CV_RGB2GRAY);
if (src.type() != CV_8U)
src.convertTo(src, CV_8U, 1, 0);
cv::Mat filter0, filter45, filter135, filter90, //四个方向滤波器
dst0 = cv::Mat::zeros(src.rows, src.cols, CV_8U),
dst45 = cv::Mat::zeros(src.rows, src.cols, CV_8U),
dst135 =cv::Mat::zeros(src.rows, src.cols, CV_8U),
dst90 = cv::Mat::zeros(src.rows, src.cols, CV_8U);
//获取四个方向滤波核
filter0 = get_filter0(s);
filter45 = get_filter45(s);
filter90 = get_filter90(s);
filter135 = get_filter135(s);
//四个方向分别滤波
Nozerosfilter(src, dst0, filter0);
Nozerosfilter(src, dst45, filter45);
Nozerosfilter(src, dst90, filter90);
Nozerosfilter(src, dst135, filter135);
std::vector<cv::Mat> filtedst;
filtedst.push_back(dst0);
filtedst.push_back(dst45);
filtedst.push_back(dst90);
filtedst.push_back(dst135);
cv::Mat min = cv::Mat::zeros(src.rows, src.cols, CV_8U);//四个方向中为1的最小个数
cv::Mat max = cv::Mat::zeros(src.rows, src.cols, CV_8U);//四个方向中为1的最大个数
double num_Min, num_Max;
double DK[4] = {};
for (int i = 0; i < src.rows; ++i){
for (int j = 0; j < src.cols; ++j){
for (int k = 0; k < 4; ++k){
uint pix = filtedst[k].at<uchar>(i, j);
DK[k] = pix;
}
num_Max = *(std::max_element)(DK, DK + 4);
num_Min = *(std::min_element)(DK, DK + 4);
min.at<uchar>(i, j) = num_Min;
max.at<uchar>(i, j) = num_Max;
}
}
//最小值/最大值
min.convertTo(min, CV_64F, 1, 0);
max.convertTo(max, CV_64F, 1, 0);
cv::Mat ration = cv::Mat::zeros(src.rows, src.cols, CV_64F);
ration = min / max;
return ration;
}
cv::Mat LIG::Calc_Gmap(cv::Mat src, int wsize){
if (wsize % 2 == 0){
fprintf(stderr, "Please enter odd size!");
exit(-1);
}
if (src.channels() > 1) cvtColor(src, src, CV_RGB2GRAY);
if (src.type() == CV_8U)
src.convertTo(src, CV_64F, 1.0, 0);
int Border = (wsize - 1) / 2;
cv::Mat Newsrc;
cv::copyMakeBorder(src, Newsrc, Border, Border, Border, Border, cv::BORDER_REFLECT_101);//以边缘为轴,对称
cv::Mat dst = cv::Mat::zeros(src.size(), src.type());
//Gradient characteristics
cv::Mat_<double > img_gx, img_gy, img_gvalue;
Calc_gradient(src, img_gx, img_gy);
cv::magnitude(img_gx, img_gy, img_gvalue);
cv::copyMakeBorder(img_gx, img_gx, Border, Border, Border, Border, cv::BORDER_REFLECT_101);
cv::copyMakeBorder(img_gy, img_gy, Border, Border, Border, Border, cv::BORDER_REFLECT_101);
cv::copyMakeBorder(img_gvalue, img_gvalue, Border, Border, Border, Border, cv::BORDER_REFLECT_101);
int ROI_center = Border;
int nss = 0;
for (int r = Border; r < src.rows + Border; ++r){
for (int c = Border; c < src.cols + Border; ++c){
cv::Rect area(c - Border, r - Border, wsize, wsize);
cv::Mat Slide_Window_gx = img_gx(area);
cv::Mat Slide_Window_gy = img_gy(area);
cv::Mat Slide_Window_gvalue = img_gvalue(area);
//First quadrant - NE
cv::Mat GX1 = get_NE_data(Slide_Window_gx, ROI_center);
cv::Mat GY1 = get_NE_data(Slide_Window_gy, ROI_center);
cv::Mat Gvalue1 = get_NE_data(Slide_Window_gvalue, ROI_center);
int num = 0;
double gm1 = 0.0;
double G1 = 0.0;
for (int i = 0; i < GX1.rows; ++i){
for (int j = 0; j < GX1.cols; ++j){
double x = GX1.at<double>(i, j);
double y = GY1.at<double>(i, j);
double value = Gvalue1.at<double>(i, j);
if (x <= 0 && y >= 0){
gm1 = gm1 + value*value;
++num;
}
}
}
if (num>0)
G1 = gm1 / num;
//The second quadrant - NW
cv::Mat GX2 = get_NW_data(Slide_Window_gx, ROI_center);
cv::Mat GY2 = get_NW_data(Slide_Window_gy, ROI_center);
cv::Mat Gvalue2 = get_NW_data(Slide_Window_gvalue, ROI_center);
num = 0;
double gm2 = 0.0;
double G2 = 0.0;
for (int i = 0; i < GX2.rows; ++i){
for (int j = 0; j < GX2.cols; ++j){
double x = GX2.at<double>(i, j);
double y = GY2.at<double>(i, j);
double value = Gvalue2.at<double>(i, j);
if (x >= 0 && y >= 0){
gm2 = gm2 + value*value;
++num;
}
}
}
if (num > 0)
G2 = gm2 / num;
//The third quadrant -SW
cv::Mat GX3 = get_SW_data(Slide_Window_gx, ROI_center);
cv::Mat GY3 = get_SW_data(Slide_Window_gy, ROI_center);
cv::Mat Gvalue3 = get_SW_data(Slide_Window_gvalue, ROI_center);
num = 0;
double gm3 = 0.0;
double G3 = 0.0;
for (int i = 0; i < GX3.rows; ++i){
for (int j = 0; j < GX3.cols; ++j){
double x = GX3.at<double>(i, j);
double y = GY3.at<double>(i, j);
double value = Gvalue3.at<double>(i, j);
if (x >= 0 && y <= 0){
gm3 = gm3 + value*value;
++num;
}
}
}
if (num>0)
G3 = gm3 / num;
//The fourth quadrant -SE
cv::Mat GX4 = get_SE_data(Slide_Window_gx, ROI_center);
cv::Mat GY4 = get_SE_data(Slide_Window_gy, ROI_center);
cv::Mat Gvalue4 = get_SE_data(Slide_Window_gvalue, ROI_center);
num = 0;
double gm4 = 0.0;
double G4 = 0.0;
for (int i = 0; i < GX4.rows; ++i){
for (int j = 0; j < GX4.cols; ++j){
double x = GX4.at<double>(i, j);
double y = GY4.at<double>(i, j);
double value = Gvalue4.at<double>(i, j);
if (x <= 0 && y <= 0){
gm4 = gm4 + value*value;
++num;
}
}
}
if (num>0)
G4 = gm4 / num;
//Ration
double G[4] = { G1, G2, G3, G4 };
double max_G = *(std::max_element)(G, G + 4);
double min_G = *(std::min_element)(G, G + 4);
//double gradient_ration = min_G / (max_G + 0.000000001);
double gradient_ration = (G1 + G2 + G3 + G4);
dst.at<double>(r - Border, c - Border) = gradient_ration;
}
}
src.convertTo(src, CV_8U, 1, 0);
cv::normalize(dst, dst, 0, 1.0, cv::NORM_MINMAX); //If the image is to be displayed, it should be normalized
return dst;
}
void LIG::Calc_LIG(cv::Mat src, cv::Mat &Imap, cv::Mat &Gmap, cv::Mat &IGmap, int wsize, double K){
Imap = Calc_Imap(src, wsize);
Gmap = Calc_Gmap(src, wsize);
IGmap = Imap.mul(Gmap);
}



评论(0)
您还未登录,请登录后发表或查看评论