

简介:
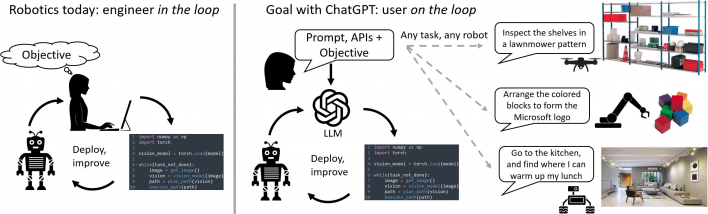
随着人工智能技术的不断发展,语言模型在机器人领域的应用越来越广泛。ChatGPT是微软研究院开发的一个基于Transformer的预训练语言模型,其应用已经拓展到机器人领域。微软新发布了论文《ChatGPT for Robotics: Design Principles and Model Abilities》。本文将介绍ChatGPT在机器人领域的应用,并探讨其设计原则和模型能力。
一、ChatGPT在机器人中的应用
ChatGPT在机器人领域的应用主要体现在两个方面:自然语言交互和自动化决策。
1.自然语言交互
在机器人与人类的交互中,语言交互是一种最为自然和普遍的方式。ChatGPT作为一种预训练语言模型,可以被应用于机器人与人类之间的自然语言交互。例如,机器人可以通过ChatGPT来理解人类的自然语言指令,并根据指令进行相应的动作。
2.自动化决策
机器人在执行任务时需要做出各种决策,例如路径规划、物体识别等。ChatGPT可以应用于机器人的自动化决策中。例如,机器人可以通过ChatGPT来生成任务方案,根据任务要求做出相应的决策。
二、ChatGPT的设计原则
在应用ChatGPT于机器人领域之前,我们需要了解它的设计原则。ChatGPT的设计原则主要包括以下三点:
1.多领域预训练
ChatGPT采用多领域预训练,即在多个领域的数据上进行预训练,使得模型可以具备更加通用的能力。这使得ChatGPT在机器人领域的应用更加灵活和普适。
2.动态生成响应
ChatGPT在自然语言交互中的应用中,采用了动态生成响应的方法。ChatGPT可以根据人类的输入动态生成响应,并可以根据上下文进行响应的调整,从而使得机器人与人类之间的交互更加自然和流畅。
3.远程执行
ChatGPT在机器人中的应用中,采用了远程执行的方式。即ChatGPT可以在云端完成计算和响应生成,从而减轻机器人本身的负担,提高机器人的响应速度和效率。
三、ChatGPT的模型能力
ChatGPT在机器人中的应用中,具备了以下几个方面的模型能力:
1.语言理解
ChatGPT作为一种预训练语言模型,在机器人中的应用中具备很强的语言理解能力。ChatGPT可以理解自然语言指令,并根据指令进行相应的动作。例如,当用户向机器人发出“打开门”的指令时,ChatGPT可以理解这个指令,并控制机器人执行相应的动作。
2.任务生成
ChatGPT在机器人中的应用中,可以根据任务需求生成相应的任务方案。例如,在机器人清扫房间的任务中,ChatGPT可以生成清扫路径和清扫时序,从而使机器人能够高效地完成任务。
3.上下文感知
ChatGPT在机器人与人类交互中的应用中,可以根据上下文进行响应的调整。例如,在机器人与用户交互的过程中,ChatGPT可以根据上下文的变化动态调整响应内容,从而使机器人与用户之间的交互更加自然和流畅。
4.模型迁移
ChatGPT作为一种通用的语言模型,可以进行模型迁移,从而使得机器人在不同的应用场景中都能够获得很好的表现。例如,当机器人从一个房间移动到另一个房间时,ChatGPT可以快速适应新的环境,从而使机器人能够更加智能地执行任务。
四、ChatGPT 机器人技术的设计原则
论文介绍了如何利用ChatGPT在机器人领域进行设计,建立一套适合机器人任务的编写提示方法和设计原则。
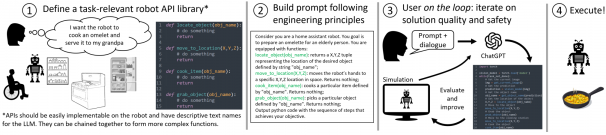
- 首先,定义一组高级机器人API或函数库,这个函数库可以是特定于某个机器人的,需要映射到机器人控制堆栈或感知库中的现有低级实现。高级API应使用描述性名称,以便ChatGPT能够推理其行为。
- 接下来,编写一个文本提示,描述任务目标,同时明确说明可用的高级函数库中的哪些函数。提示还可以包含有关任务约束的信息,或者有关ChatGPT如何形成其答案(特定编码语言,使用辅助解析元素)的信息。
- 用户通过直接检查或使用模拟器来评估ChatGPT的代码输出,如果需要,用户可以使用自然语言来提供反馈,以提高答案的质量和安全性。
- 当用户对解决方案满意时,最终代码可以部署到机器人上。
五、应用实例
零样本任务规划
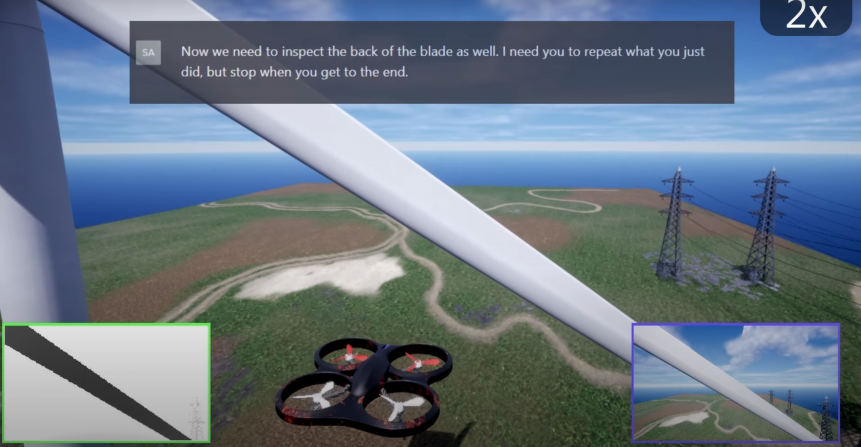
论文介绍了使用ChatGPT控制一架真实的无人机,结果证明ChatGPT是一个极其直观的基于语言的非技术用户和机器人之间的接口。当用户的指令模糊不清时,ChatGPT会提出澄清问题,并为无人机编写复杂的代码结构,例如用蜿蜒曲折的路径检查货架。甚至ChatGPT还会想出如何自拍!

论文还在 Microsoft AirSim 模拟器的模拟工业检查场景中使用了 ChatGPT。该模型能够有效解析用户的高级意图和几何线索,以准确控制无人机。
控制机器人手臂进行操纵操作
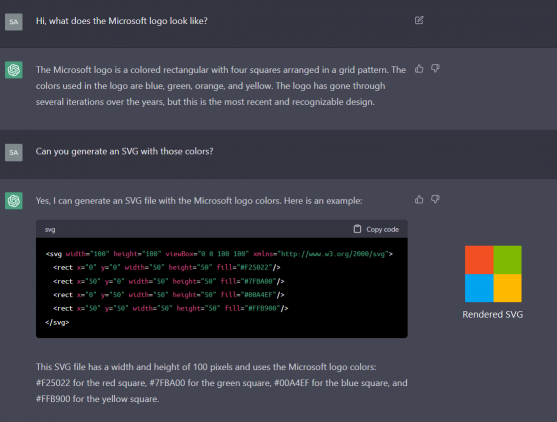
通过对话式反馈,教授模型如何将最初提供的API组合成更复杂的高级函数:由ChatGPT自行编码。使用基于课程的策略,模型能够逻辑地将这些学习到的技能链接在一起,执行操作,例如堆叠方块。此外,当被要求用木块建造微软标志时,模型展示了一个例子,桥接了文本和物理领域。它不仅能从内部知识库中召回标志,还能“绘制”标志(作为SVG代码),然后使用上面学到的技能来确定哪些现有的机器人操作可以组成它的物理形态。

论文让ChatGPT编写一个算法,使一架无人机在太空中到达目标位置时不会撞上障碍物。告诉模型,这架无人机有一个向前的距离传感器,ChatGPT立即编写了大多数算法的关键模块。

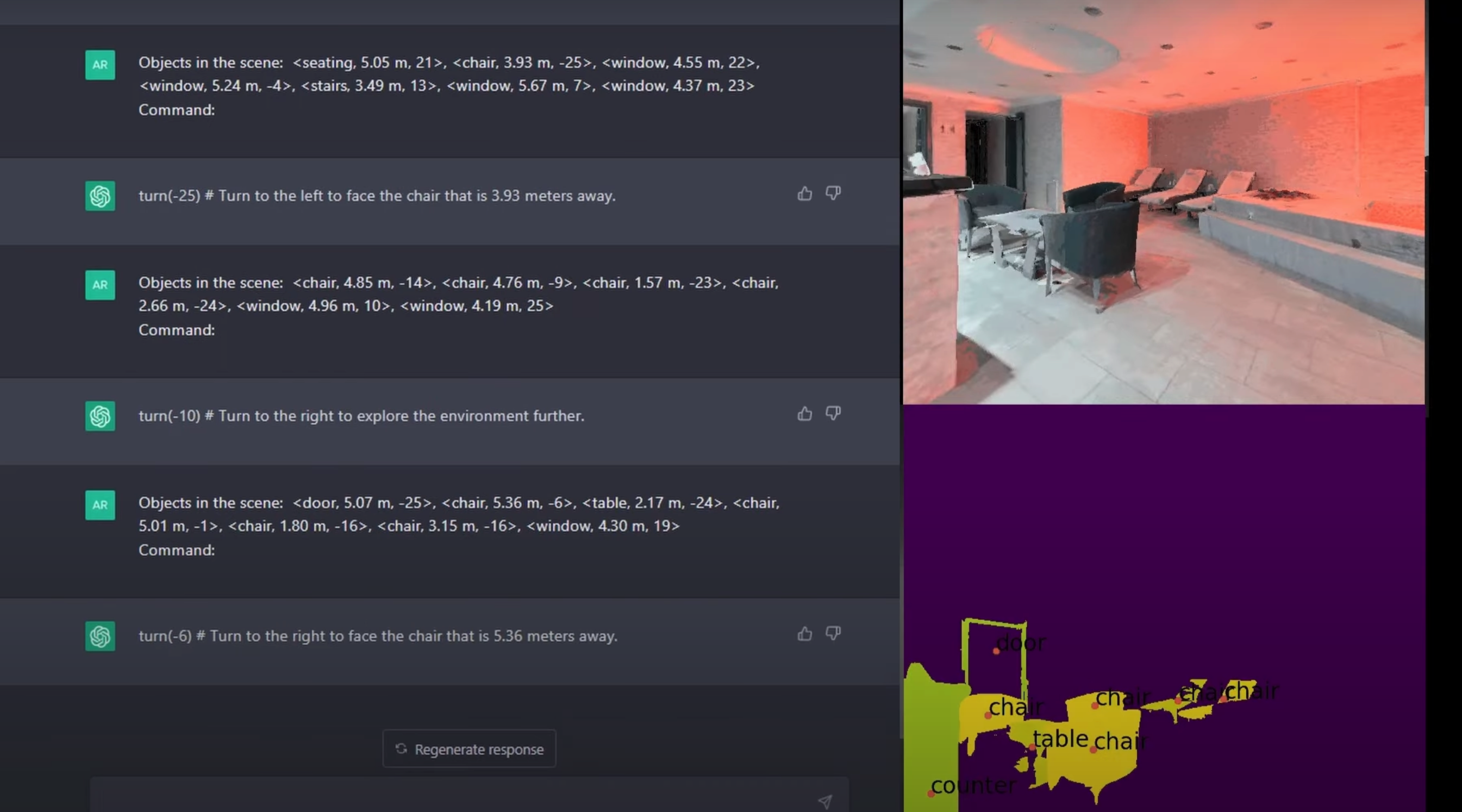
感知-动作循环
论文介绍了Microsoft的研究人员如何使用ChatGPT在机器人任务中建立语言界面。他们通过不断试错,建立了一套编写机器人任务的设计原则,包括定义高级机器人API或函数库,编写文本提示,由用户进行反馈等。他们使用ChatGPT控制无人机、机械臂和环境探索,验证其能够感知环境并实现相应的动作。实验结果表明,ChatGPT可以根据传感器反馈实时决定机器人下一步的移动路径,展示了其在感知动作循环方面的优异性能。
六、结语
论文介绍了ChatGPT在机器人领域的应用,并探讨了其设计原则和模型能力。随着人工智能技术的不断发展,语言模型在机器人领域的应用将会越来越广泛。ChatGPT作为一种基于Transformer的预训练语言模型,在机器人领域的应用中具有很强的灵活性和普适性,为机器人的发展提供了很好的支持和帮助。


评论(0)
您还未登录,请登录后发表或查看评论