

本篇继续介绍动力学库当中的一些函数及其数学运算
11、translationFromSXform
从空间变换矩阵提取位移向量,形式如下:
变换矩阵:
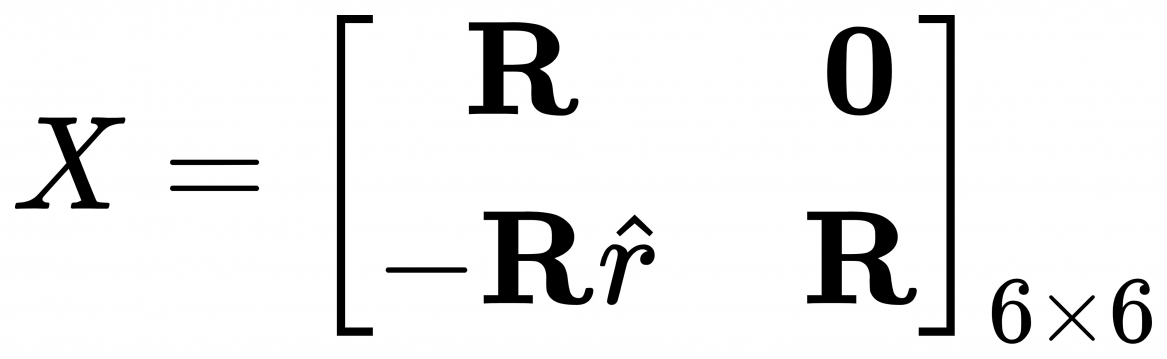
因此有:
![]()
【168-175】源码:
auto translationFromSXform(const Eigen::MatrixBase<T>& X) {
static_assert(T::ColsAtCompileTime == 6 && T::RowsAtCompileTime == 6,
"Must have 6x6 matrix");
RotMat<typename T::Scalar> R = rotationFromSXform(X);
Vec3<typename T::Scalar> r =
-matToSkewVec(R.transpose() * X.template bottomLeftCorner<3, 3>());
return r;
}12、invertSXform
空间变换矩阵的逆,首先有性质如下:
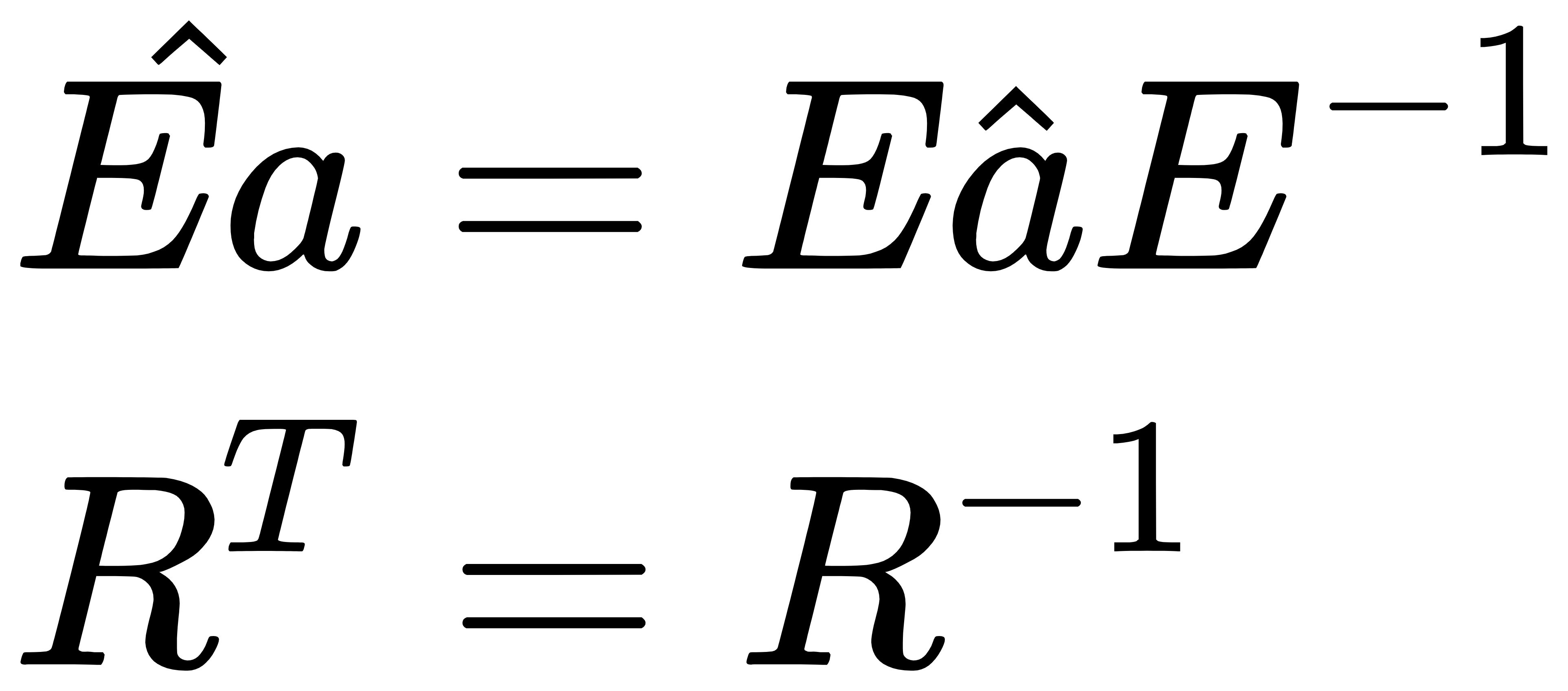
其中R为旋转矩阵,因此有:
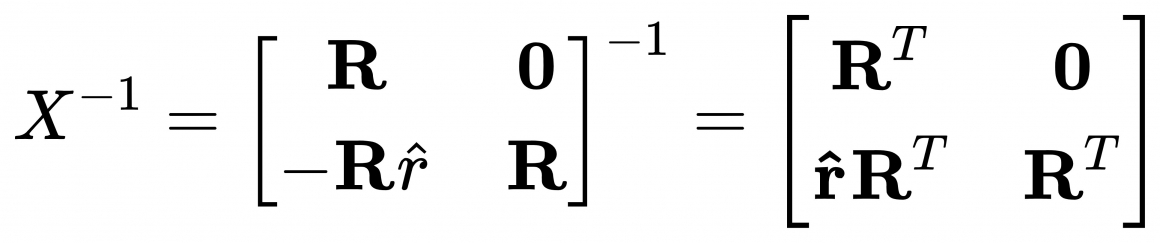
并且:
![]()
TIPS:重写代码时,不必像MIT的代码里面那样绕来绕去,直接按逆的形式构建矩阵更为简洁,【180-189】源码:
auto invertSXform(const Eigen::MatrixBase<T>& X) {
static_assert(T::ColsAtCompileTime == 6 && T::RowsAtCompileTime == 6,
"Must have 6x6 matrix");
RotMat<typename T::Scalar> R = rotationFromSXform(X);
Vec3<typename T::Scalar> r =
-matToSkewVec(R.transpose() * X.template bottomLeftCorner<3, 3>());
SXform<typename T::Scalar> Xinv = createSXform(R.transpose(), -R * r);
return Xinv;
}13、jointMotionSubspace
关节运动向量的子空间,根据关节类型以及旋转轴(移动轴),创建一个向量。例如关节类型为旋转关节,轴为X轴,则:
![]()
【195-213】源码:
SVec<T> jointMotionSubspace(JointType joint, CoordinateAxis axis) {
Vec3<T> v(0, 0, 0);
SVec<T> phi = SVec<T>::Zero();
if (axis == CoordinateAxis::X)
v(0) = 1;
else if (axis == CoordinateAxis::Y)
v(1) = 1;
else
v(2) = 1;
if (joint == JointType::Prismatic)
phi.template bottomLeftCorner<3, 1>() = v;
else if (joint == JointType::Revolute)
phi.template topLeftCorner<3, 1>() = v;
else
throw std::runtime_error("Unknown motion subspace");
return phi;
}14、jointXform
关节空间变换矩阵,输入关节类型,轴,以及角度(位移),返回变换矩阵。当关节类型为旋转关节时,调用函数(2)得到:
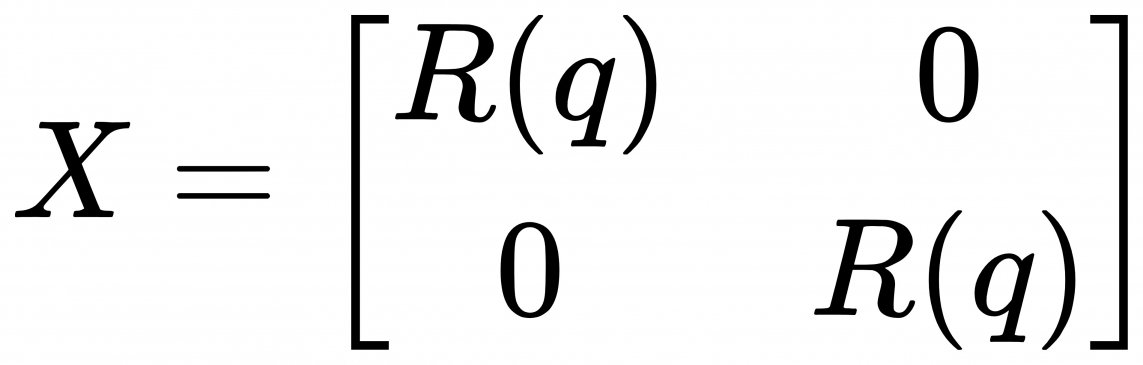
当关节为移动关节时,调用函数(9)创建变换矩阵,得到:
【219-237】源码:
Mat6<T> jointXform(JointType joint, CoordinateAxis axis, T q) {
Mat6<T> X = Mat6<T>::Zero();
if (joint == JointType::Revolute) {
X = spatialRotation(axis, q);
} else if (joint == JointType::Prismatic) {
Vec3<T> v(0, 0, 0);
if (axis == CoordinateAxis::X)
v(0) = q;
else if (axis == CoordinateAxis::Y)
v(1) = q;
else if (axis == CoordinateAxis::Z)
v(2) = q;
X = createSXform(RotMat<T>::Identity(), v);
} else {
throw std::runtime_error("Unknown joint xform\n");
}
return X;
}16、spatialToLinearVelocity
空间向量转线速度,给点空间速度以及给定点的位置,求得该点下的线速度。速度向量:
可求得线速度:
![]()
【261-271】源码:
auto spatialToLinearVelocity(const Eigen::MatrixBase<T>& v,
const Eigen::MatrixBase<T2>& x) {
static_assert(T::ColsAtCompileTime == 1 && T::RowsAtCompileTime == 6,
"Must have 6x1 vector");
static_assert(T2::ColsAtCompileTime == 1 && T2::RowsAtCompileTime == 3,
"Must have 3x1 vector");
Vec3<typename T::Scalar> vsAng = v.template topLeftCorner<3, 1>();
Vec3<typename T::Scalar> vsLin = v.template bottomLeftCorner<3, 1>();
Vec3<typename T::Scalar> vLinear = vsLin + vsAng.cross(x);
return vLinear;
}17、spatialToAngularVelocity
空间速度获取角速度,后三个变量即为角速度
【277-282】源码:
auto spatialToAngularVelocity(const Eigen::MatrixBase<T>& v) {
static_assert(T::ColsAtCompileTime == 1 && T::RowsAtCompileTime == 6,
"Must have 6x1 vector");
Vec3<typename T::Scalar> vsAng = v.template topLeftCorner<3, 1>();
return vsAng;
}18、spatialToLinearAcceleration
给定空间加速度向量,和速度,求线加速度
![]()
【289-300】源码:
auto spatialToLinearAcceleration(const Eigen::MatrixBase<T>& a,
const Eigen::MatrixBase<T2>& v) {
static_assert(T::ColsAtCompileTime == 1 && T::RowsAtCompileTime == 6,
"Must have 6x1 vector");
static_assert(T2::ColsAtCompileTime == 1 && T2::RowsAtCompileTime == 6,
"Must have 6x1 vector");
Vec3<typename T::Scalar> acc;
// classical accleration = spatial linear acc + omega x v
acc = a.template tail<3>() + v.template head<3>().cross(v.template tail<3>());
return acc;
}【307-323】源码:
auto spatialToLinearAcceleration(const Eigen::MatrixBase<T>& a,
const Eigen::MatrixBase<T2>& v,
const Eigen::MatrixBase<T3>& x) {
static_assert(T::ColsAtCompileTime == 1 && T::RowsAtCompileTime == 6,
"Must have 6x1 vector");
static_assert(T2::ColsAtCompileTime == 1 && T2::RowsAtCompileTime == 6,
"Must have 6x1 vector");
static_assert(T3::ColsAtCompileTime == 1 && T3::RowsAtCompileTime == 3,
"Must have 3x1 vector");
Vec3<typename T::Scalar> alin_x = spatialToLinearVelocity(a, x);
Vec3<typename T::Scalar> vlin_x = spatialToLinearVelocity(v, x);
// classical accleration = spatial linear acc + omega x v
Vec3<typename T::Scalar> acc = alin_x + v.template head<3>().cross(vlin_x);
return acc;
}19、sXFormPoint
对给定点作坐标变换,利用函数rotationFromSXform以及translationFromSXform从空间变换矩阵中提取旋转矩阵以及位移向量,作以下运算:

【329-340】源码:
auto sXFormPoint(const Eigen::MatrixBase<T>& X,
const Eigen::MatrixBase<T2>& p) {
static_assert(T::ColsAtCompileTime == 6 && T::RowsAtCompileTime == 6,
"Must have 6x6 vector");
static_assert(T2::ColsAtCompileTime == 1 && T2::RowsAtCompileTime == 3,
"Must have 3x1 vector");
Mat3<typename T::Scalar> R = rotationFromSXform(X);
Vec3<typename T::Scalar> r = translationFromSXform(X);
Vec3<typename T::Scalar> Xp = R * (p - r);
return Xp;
}20、forceToSpatialForce
将某一点的力向量转为空间向量,力的空间向量表述为:
其中n为力矩,f为力,对于给定点P,其受力作用,有:
【248-358】源码:
auto forceToSpatialForce(const Eigen::MatrixBase<T>& f,
const Eigen::MatrixBase<T2>& p) {
static_assert(T::ColsAtCompileTime == 1 && T::RowsAtCompileTime == 3,
"Must have 3x1 vector");
static_assert(T2::ColsAtCompileTime == 1 && T2::RowsAtCompileTime == 3,
"Must have 3x1 vector");
SVec<typename T::Scalar> fs;
fs.template topLeftCorner<3, 1>() = p.cross(f);
fs.template bottomLeftCorner<3, 1>() = f;
return fs;
}


评论(0)
您还未登录,请登录后发表或查看评论