

0. 简介
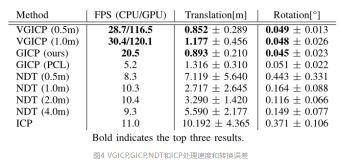
之前我们在以前的文章中介绍了很多有关于点云匹配相关的知识,最近两年处理GICP这一大一统的ICP匹配方法以外,还有一个工作对体素化和ICP这两者打起了心思,《Voxelized GICP for Fast and Accurate 3D Point Cloud Registration》提出了一种体素化的广义迭代最近点(VGICP)算法,用于快速、准确地进行三维点云配准。该方法扩展了广义迭代最近点(GICP)方法的体素化,避免了代价昂贵的最近邻搜索,同时保持了算法的精度。与从点位置计算体素分布的正态分布变换(NDT)不同,我们通过聚集体素中每个点的分布来估计体素分布。体素化方法使算法能够高效地并行处理优化问题,所提出的算法在CPU上可以运行30hz,在GPU上可以运行120hz。通过在模拟环境和真实环境中的评估,我们证实了该算法的精度可以与GICP相媲美,但比现有的方法快得多。结合类ICP和NDT的两者的优点。
这里深蓝AI的文章中也证明了这一点。
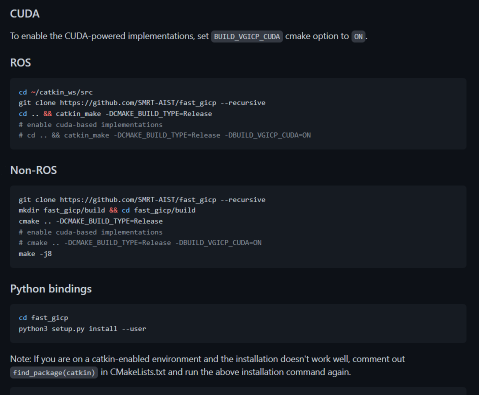
值得一提的是与GICP一样,VGICP也是开源的,开源地址为:https://github.com/SMRT-AIST/fast_gicp.git
1. 文章贡献
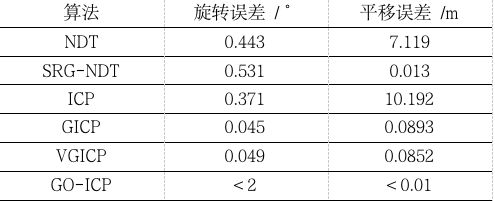
三维点云配准是标定、定位、建图和环境重建的等任务中的关键任务。有两种主流的点云配准方法: 广义迭代最近邻方法GICP和正态分布变换NDT方法。GICP算法扩展了经典的ICP算法,通过计算分布到分布的形式提高了配准精度。NDT利用体素化方法避免高昂的最近邻搜索,提高处理速度。由于GICP和其他ICP算法的变种均依赖于最近邻搜索,这使得很难在计算资源受限的计算机中实时的处理大量点云数据。而NDT通常对体素的分辨率大小非常敏感。最佳的体素分辨率取决于环境和传感器属性,如果选择不当的分辨率,则NDT的精度将大幅降低。本文的通过聚合每个体素内所有点的分布,使得体素化的过程更为鲁棒。相比于NDT从点的空间位置估计体素的分布,本文的体素化方法即使体素中有很少的点,也能够产生有效的体素分布。这也使得算法对体素分辨率的改变更加鲁棒。VGICP论文内容写得还是比较详细充实的,从作者的归纳来看论文的贡献有三个方面:
- 首先,提出了一种多点分布聚合方法来从较少的点稳健估计体素的分布。
- 其次,提出了VGICP算法,它与GICP一样精确,但比现有方法快得多。
- 第三,代码开源,并且代码实现了包含了所提出的VGICP以及GICP。 开源代码中包含有以下几个部分,同时支持ROS
FastGICP: multi-threaded GICP algorithm (~40FPS)
FastGICPSingleThread: GICP algorithm optimized for single-threading (~15FPS)
FastVGICP: multi-threaded and voxelized GICP algorithm (~70FPS)
FastVGICPCuda: CUDA-optimized voxelized GICP algorithm (~120FPS)
2. 具体算法
由于VGICP是由ICP变化而来,这里我们一一来将GICP和VGICP公式之间的对应进行梳理,以方便各位来进行对比:
2.1 初始化
我们考虑变换
的估计,它将一组点
(源点云)与另一组点
( 目标点云)。 遵循经典的ICP算法,我们假设A和B之间的对应关系由最近邻搜索给出:
。 GICP 算法 [8] 将采样点的表面建模为高斯分布:
。 然后,我们定义转换误差如下:
为了能够推到出VGICP算法,我们首先对式1进行扩展,使得其可以计算点到其邻近点集 的距离, 如下
2.2 高斯分布
的分布由高斯分布的再生特性给出:
在VGICP中,这个方程可以解释为平滑目标点分布。类似于
′ 的分布由下式给出
2.3 最大化似然概率
GICP 算法找到使方程的对数似然最大化的变换
估计体素化方程的对数似然最大化的变换 如下
为了有效地计算上述等式,我们将其修改为
其中 为邻点的数量。 上式 表明我们可以通过用 周围的点 ( 和 ) 的分布的平均值代替GICP等式中的 和 来有效地计算目标函数。 并通过 对函数进行加权。 我们可以通过在每个体素中存储 和 来自然地将该方程应用于基于体素的计算。

我们使用渐变的椭圆表示可能的分布,用实心的点表示确切的位置。不难看出,GICP实际上是一种 nearest distribution-to-distribution的方法,每次找到最近的点对,使用各自的局部几何性质加权距离损失,用以优化;而NDT是 voxel-based point-to-distribution 的方法,求解最优的变换,使得点投射到网格化的分布中时,达到的概率函数响应最大;VGICP则希望建模为voxel-based distribution-to-multidistribution方法,同时求解最有可能的分布到分布之间的配对关系。 相比较之下,NDT使用点对体素分布对应的模型,但至少需要4个点(实际多于10个)来计算一个立方体中的协方差矩阵,如果体素中的点数很低,协方差矩阵就不能完全可用,而VGICP根据点及其邻点的分布计算体素分布,所以即使体素仅包含一个点,它也可以生成适当的协方差矩阵。
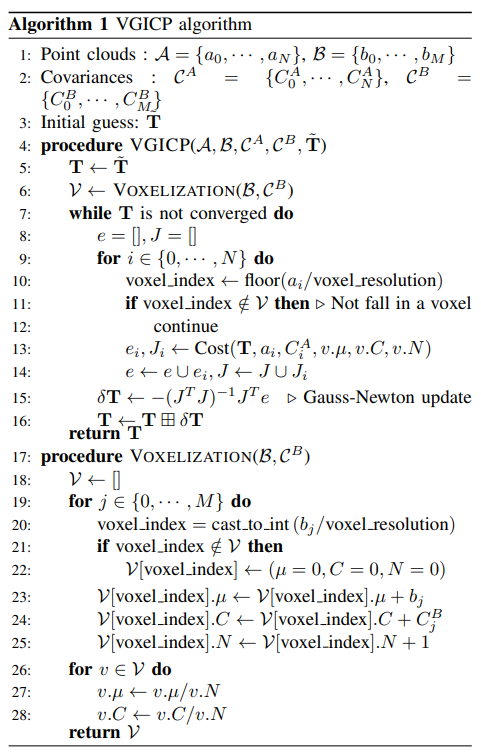
3. 伪代码
算法1详细描述了VGICP的配准过程。如上所述,VGICP算法在优化过程中不需要代价高昂的最近邻搜索,因此可以利用CPU和GPU并行处理。对于姿态优化,我们选择高斯-牛顿优化器,因为它收敛速度快,不需要超参数,不像准牛顿方法。
文中实现了三个版本的VGICP算法:单线程、多线程和GPU处理。所有版本首先使用基于kd树的最近邻搜索[13]估计每个点的协方差矩阵。这个协方差估计在多线程和GPU处理版本中是并行的。我们还实现了基于gpu的暴力近邻搜索。作为基线,我们在VGICP的基础上实现了GICP算法。GICP的实现也是通过CPU多线程并行的,但不能在GPU上实现,因为它依赖于kd树最近邻搜索,不适合GPU。
4. 参考链接
https://blog.csdn.net/qq_46480130/article/details/117512879



评论(0)
您还未登录,请登录后发表或查看评论