

ROS机器人操作系统——创建工作空间与功能包(四)
ROS机器人操作系统
文章目录
ROS机器人操作系统
前言
一、工作空间
1.创建工作空间
2.编译工作空间
3.设置环境变量
4.检查环境变量
二、功能包
1.创建功能包
2.编译功能包
总结
前言
工作空间与功能包是ROS工程中两个非常重要的概念
一、工作空间

src放置功能包的文件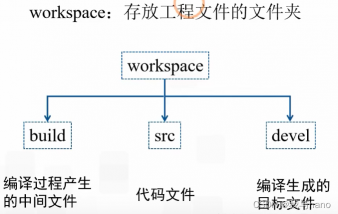
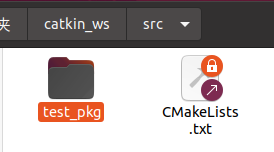
1.创建工作空间
mkdir -p ~/catkin_ws/src #-p检测路径,没有就创建
cd ~/catkin_ws/src
catkin_init_workspace
后面的src是不能更改的
2.编译工作空间
cd ~/catkin_ws/
catkin_make
catkin_make编译整个工作空间
3.设置环境变量
source devel/setup.bash
4.检查环境变量
echo $ROS_PACKAGE_PATH

二、功能包
1.创建功能包
[depend1] [depend2] [depend3]依赖,编译时需要依赖哪些功能包
cd ~/catkin_ws/src
catkin_create_pkg test_pkg std_msgs rospy roscpp
所有源码必须放在功能包下面进行编译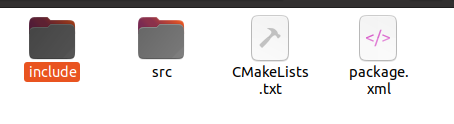
include存放头文件
src源码
另外两个是每一个功能包必须存在的文件,说明是功能包文件,而不是普通的文件。
package.xml存储一些基本信息
cmake里面声明了一些编译规则
2.编译功能包
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash

同一个工作空间下,不允许存在同名功能包
不同工作空间下,允许存在同名功能包
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。

评论(0)
您还未登录,请登录后发表或查看评论