

文章目录
前言
首先,上一篇使用urdf文件创建了一个四轮小车模型。这一篇想使用xacro文件创建一个正真的机器人模型。
xacro比urdf更具可读性和可维护性。它还允许我们创建模型并复用这些模型去创建相同的结构。在里面我们可以进行宏定义、变量定义、头文件包含、数学运算等操作。
我们确定下机器人的形态:一个带有摄像头、激光雷达的四轮移动机器人,其中两个轮子是带有电机的差动轮,另外两个为支撑轮。我们需要确定的参数如下:机器人主体的尺寸、颜色、角度,机器人轮子(包括joint与link)的尺寸,颜色、角度,机器人摄像头的尺寸、颜色、角度等。
一、创建编译功能包
切换到catkin_ws/src目录下,如下:
catkin_create_pkg mbot_sim urdf xacro切换到catkin_ws目录下,编译该功能包,如下:
catkin_make mbot_sim在该功能包下创建include、src、launch、urdf文件夹,在urdf文件下创建urdf文件夹和xacro文件夹。
二、xacro文件
1、创建robot_base.xacro文件
切换到xacro文件下,创建robot_base文件,文件内容如下
<?xml version="1.0"?>
<robot name="mbot" xmlns:xacro="http://www.ros.org/wiki/xacro">
<!-- PROPERTY LIST -->
<xacro:property name="M_PI" value="3.1415926"/>
<xacro:property name="base_radius" value="0.20"/>
<xacro:property name="base_length" value="0.16"/>
<xacro:property name="wheel_radius" value="0.06"/>
<xacro:property name="wheel_length" value="0.025"/>
<xacro:property name="wheel_joint_y" value="0.19"/>
<xacro:property name="wheel_joint_z" value="0.05"/>
<!-- -->
<xacro:property name="caster_radius" value="0.015"/>
<!-- wheel_radius - ( base_length/2 - wheel_joint_z) -->
<xacro:property name="caster_joint_x" value="0.18"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<!-- Macro for robot wheel -->
<xacro:macro name="wheel" params="prefix reflect">
<joint name="${prefix}_wheel_joint " type="continuous">
<origin xyz="0 ${reflect*wheel_joint_y} ${-wheel_joint_z}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
<material name="gray" />
</visual>
</link>
</xacro:macro>
<!-- Macro for robot caster -->
<xacro:macro name="caster" params="prefix reflect">
<joint name="${prefix}_caster_joint" type="continuous">
<origin xyz="${reflect*caster_joint_x} 0 ${-(base_length/2 + caster_radius)}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="${prefix}_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="${prefix}_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="${caster_radius}" />
</geometry>
<material name="black" />
</visual>
</link>
</xacro:macro>
<!-- Macro for robot base -->
<xacro:macro name="mbot_base">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow" />
</visual>
</link>
<wheel prefix="left" reflect="-1"/>
<wheel prefix="right" reflect="1"/>
<caster prefix="front" reflect="-1"/>
<caster prefix="back" reflect="1"/>
</xacro:macro>
</robot>2、解释robot_base.xacro文件
文件的前两行是每个xacro文件必须包含的。
接下来,我们定义机器人经常用到的值,使用变量进行定义,主要包括常用的参数和机器人属性,比如机器人主体圆柱体的半径大小、高度大小,差动轮圆柱体的半径大小、高度大小以及支撑轮圆柱体的半径大小、高度大小;
然后定义yellow、black、gray三种颜色;
通过宏定义机器人差动轮和支撑轮,方便代码复用。
最后定义机器人主体。
3、创建robot_camera.xacro文件
在xacro文件下,创建robot_camera.xacro文件,文件内容如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="camera">
<xacro:macro name="usb_camera" params="prefix:=camera">
<link name="${prefix}_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.01 0.04 0.04" />
</geometry>
<material name="black"/>
</visual>
</link>
</xacro:macro>
</robot>4、解释robot_camera.xacro文件
目前,只是定义了摄像头的外观,摄像头属性通过插件来进行定义的。
5、创建robot_lidar.xacro文件
在xacro文件下,创建robot_lidar.xacro文件,文件内容如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="lidar">
<xacro:macro name="hokuyo_lidar" params="prefix:=lidar">
<link name="hokuyo_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<mesh filename="package://mbot_sim/meshes/hokuyo.dae"/>
</geometry>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
</xacro:macro>
</robot>6、解释robot_lidar.xacro文件
定义了日本北洋hokuyo激光雷达,可以看到其中使用了hokuyo.dae文件。需要将usr/share/gazebo-9/models/hokuyo/目录中的meshes文件夹整体复制到我们的功能包mbot_sim下面。
7、创建robot.xacro文件
在xacro文件下,创建robot.xacro文件,文件内容如下:
<?xml version="1.0"?>
<robot name="arm" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:include filename="$(find mbot_sim)/urdf/xacro/robot_base.xacro" />
<xacro:include filename="$(find mbot_sim)/urdf/xacro/robot_camera.xacro" />
<xacro:include filename="$(find mbot_sim)/urdf/xacro/robot_lidar.xacro" />
<xacro:property name="camera_offset_x" value="-0.17" />
<xacro:property name="camera_offset_y" value="0" />
<xacro:property name="camera_offset_z" value="0.10" />
<xacro:property name="lidar_offset_x" value="0.17" />
<xacro:property name="lidar_offset_y" value="0" />
<xacro:property name="lidar_offset_z" value="0.10" />
<mbot_base/>
<joint name="camera_joint" type="fixed">
<origin xyz="${camera_offset_x} ${camera_offset_y} ${camera_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
<xacro:usb_camera prefix="camera"/>
<joint name="lidar_joint" type="fixed">
<origin xyz="${lidar_offset_x} ${lidar_offset_y} ${lidar_offset_z}" rpy="0 0 0" />
<parent link="base_link"/>
<child link="lidar_link"/>
</joint>
<xacro:hokuyo_lidar prefix="lidar"/>
</robot>8、解释robot.xacro文件
该文件直接调用了前面两个文件中定义的宏,对机器人进行显示设置,包含主体、轮子、摄像头和激光雷达。
三、launch启动文件
1、创建robot.launch文件
在launch文件下,创建robot.launch文件,文件内容如下:
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_sim)/urdf/xacro/robot.xacro'" />
<arg name="gui" default="true" />
<param name="robot_description" command="$(arg model)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_sim)/cfg/robot.rviz" required="true" />
</launch>2、运行robot.launch
命令如下:
roslaunch mbot_sim robot.launch效果如下:
四、rviz显示
同上一篇介绍,添加RobotModel后,效果如下: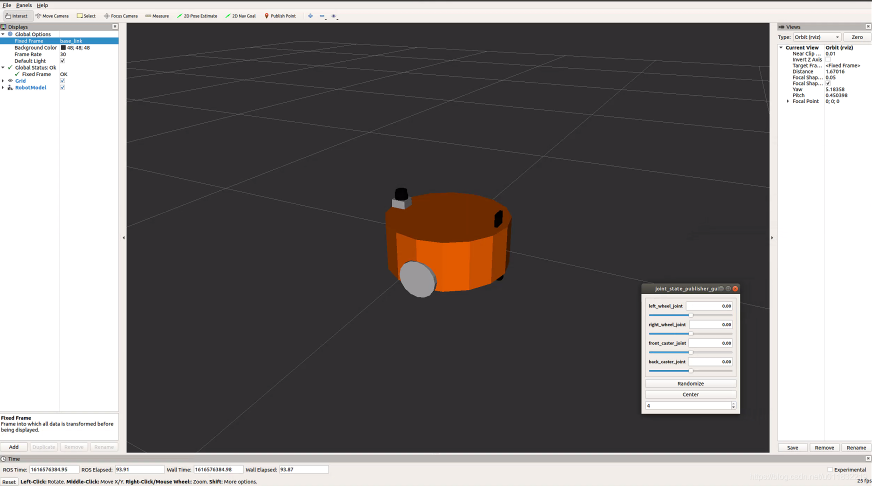
拖动右侧插件的滚动条,可以看到轮子的转动。
总结
该篇建立了一个移动机器人模型,添加了激光雷达,添加了摄像头,但摄像头只有外观没有设置属性,没有添加物理属性和碰撞属性。下一篇我们添加这些属性并尝试利用gazebo实现移动机器人在ROS系统中的仿真。



评论(0)
您还未登录,请登录后发表或查看评论