

【 课 程 介 绍 】
本课程通过介绍PID的工作原理和调参原理,并搭建硬件平台,用实例为大家讲解系统的参数辨识、PID参数自整定、在线参数微调以及模糊自适应PID,目的是为了让大家全面详细了解PID,并能够快速调节出合适的PID参数。
本课程首先定性分析和定量推导计算PID原理及调参原理。
然后搭建硬件平台,采集数据、训练获得系统参数、离线自整定PID参数、在线微调参数,感受整个流程。方便应用到其他被控对象的实际应用上。
最后介绍一种模糊自适应PID控制器,在被控对象在各种工况表现出不同响应特性时,模糊控制器可以调节合适的PID参数。
硬件平台、在线调参和硬件实现效果如下图所示:
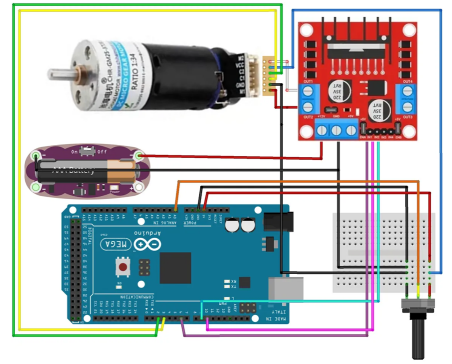
硬件验证平台
在线调参
硬件验证效果
【 课 程 内 容 】

本课程首先从一个控制水桶水位的例子出发,定性讲解PID控制原理及各控制参数的作用,然后通过分析推导一个“弹簧-阻尼-质量”系统的动力学方程,定量计算说明PID原理及各参数作用;
然后搭建硬件平台,下位机为基于Arduino和L298N的电机闭环调速系统,上位机为基于ROS的电脑,上位机可以通过手柄进行PID调参和期望转速或者PWM占空比控制指令的输出。
然后,本课程利用MATLAB强大的控制系统工具箱,利用硬件平台采集的数据进行离线的参数辨识获得传递函数模型或者状态空间模型,并通过参数自整定工具箱完成PID参数的自动设计。将离线得到的PID参数进行实际应用,在应用过程中根据控制效果进行参数的微调。
最后,由于被控对象在各种工况下响应特性不同,如低速启动阶段由于电枢有很大惯量以及摩擦阻力矩的存在,电机加速慢,而高速降到低速时由于电枢惯性,电机减速较慢。
所以需要根据系统的不同表现实时调整PID各参数,本课程介绍其中一种自适应PID——模糊自适应PID控制器,并进行离线仿真和在线实验验证。
【 其 他 课 程 】
【 课 程 目 录 】
- 课程主要内容介绍
- PID原理介绍
- 验证硬件平台介绍
- 基于数据和MATLAB工具箱的PID参数自整定
- 基于ROS和MATLAB的离线参数自整定与在线参数整定结合的调参方法(数据采集离线、参数自整定、在线参数微调)
- 模糊自适应PID控制器
- 课程总结
*课程资料请在微信公众号“古月居”后台回复“仿真控制资料”获取
【 温 馨 提 示 】
- 本课程理论及技术通用性强,从理论到技术均有设计,适合所有对PID控制器调参有需求的群体;
- 本课程基于MATLAB、ROS,其中ROS C++代码均由Simulink自动生成,易于上手,适合初学者;
- 由于本产品的视频课程属性,观看后不予退款。
【 购 课 优 惠 】
古月居官网所获积分可以兑换优惠券哦!打开古月居官网-【我的主页】-【积分兑换】,点击兑换。


兑换成功后在【兑换记录】查看兑换码,就可以在手机端使用了,不要错过省钱机会哟~


两人拼团即可享受优惠价~
三人拼团更实惠哦!
购买本课程或作者的另外两个课程:
《MATLAB+ROS快速开发控制算法》
《MATLAB+ROS开发MPC轨迹跟踪算法》
每人限领1张无门槛优惠券5元
【优惠券仅50张!】
领取后15天内有效
优惠券领取方式如下:


(扫码可领取课程优惠券)




评论(0)
您还未登录,请登录后发表或查看评论