

♦ 课 程 目 的 ♦
动力学建模及分析是工程研究中的重要组成部分。无论是规划控制算法开发,还是仿真测试,甚至后续的结构优化、参数优化都需要动力学模型来支撑。诸如机械臂、智能车、四足机器人等当前热点,其相关的研究文献大多数都包含动力学方面的相关内容。
然而与简单物体运动所不同的是,机械臂、智能车、四足机器人等机械由多个部件组成,且相关运动属于空间运动而不是平面运动。建模过程中不仅需要考虑各个部件之间的约束,还需要考虑空间中的三维旋转,极大增加了建模难度。
本课程目的是为了让大家能够详细了解多刚体系统动力学建模方法及其背后所蕴含的物理原理。通过课程案例让大家学习搭建一个多刚体系统动力学模型的过程步骤。
通过讲解仿真代码让大家学会如何运用MATLAB将所建模型动态化展示出来。课程学习完成后,希望大家能够运用所学方法搭建属于自己的动力学仿真模型。
♦ 课 程 内 容 ♦
本课程共8节内容,课程总时长3.3小时
本课程内容讲解思路如下图所示:
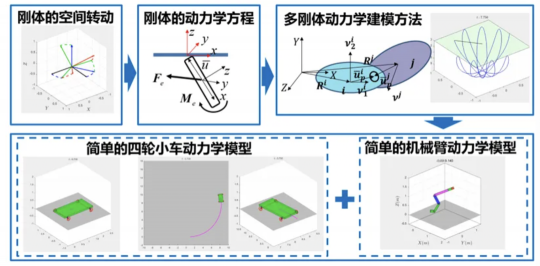
课程将从基础的刚体空间转动讲起,介绍如何描述刚体的空间旋转。然后介绍单刚体动力学方程,并通过简单的例题讲解,帮助大家加深理解。
在此基础上介绍两种多刚体系统动力学建模方法,主要适用于多刚体多约束的复杂机械,并针对简单案例采用两种方法分别进行建模帮助大家更好的掌握所学知识。
最后将基于上述建模方法,针对四轮小车与6自由度机械臂进行一步步的动力学公式推导并介绍相关的MATLAB动力学仿真代码,帮助大家更好的将所学方法应用到实际过程中。相关仿真动画如下所示:
欧拉角仿真动画

简单动力学案例仿真动画


四轮小车与机械臂动力学仿真动画
♦ 课 程 目 录 ♦
1. 课程主要内容介绍
2. 刚体的空间转动
3. 刚体动力学方程及例题讲解
4. 多刚体系统动力学建模方法介绍
5. 四轮小车动力学模型推导及仿真代码讲解
6. 机械臂动力学模型推导及仿真代码讲解
7. 课程总结
*课程资料请在微信公众号“古月居”后台回复“仿真控制资料”获取
♦ 课 程 试 看 ♦
♦ 温 馨 提 示 ♦
1. 本课程所介绍的方法通用性强,并不针对某一特定系统,适合所有对多刚体系统空间运动动力学建模有需求的群体
2. 本课程将从基础的刚体空间转动讲起,只需要简单的数理基础即可,门槛要求低,对基础薄弱的群体也很友好
3. 本课程包含理论推导、案例分析以及代码讲解,将理论所学知识用MATLAB代码的形式展现出来,更方便大家理解
4. 本课程购买后2年内可以免费观看。由于本产品的视频课程属性,观看后不予退款。
♦ 上 新 优 惠 ♦
课程原价¥79.8
两人拼团¥59.8,三人拼团¥56.8
现上新价更优惠~
本周上新期间活动期间可领取一张10元优惠券
【每人限领一张,仅限本课程使用】
领取优惠券后7天内有效
------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
两种领取方式如下所示:
1.扫码领取优惠券


2.商品详情页领取





评论(0)
您还未登录,请登录后发表或查看评论