

- 仿真描述
- 2. Gazebo简介
2.1 Gazebo的典型用途
2.2 Gazebo的主要特点 - .ros_control
- 配置物理仿真模型
4.1 为link添加惯性参数和碰撞属性
4.2 为link添加Gazebo标签
4.2.1 颜色
4.2.2 重力
4.3 为joint添加传动装置
4.4 为部分link添加阻尼系数和摩擦系数(可选)
4.5 添加ros_control插件 - 配置ros_control控制器
- 在Gazebo中添加传感器插件
6.1 摄像头
6.2 激光雷达
6.3 IMU
6.4 检查传感器插件
6.5 传感器消息可视化
6.5.1 摄像头图像的显示
6.5.2 激光雷达点云的显示
6.5.3 IMU姿态的显示 - 搭建Gazebo仿真环境
1. 仿真描述
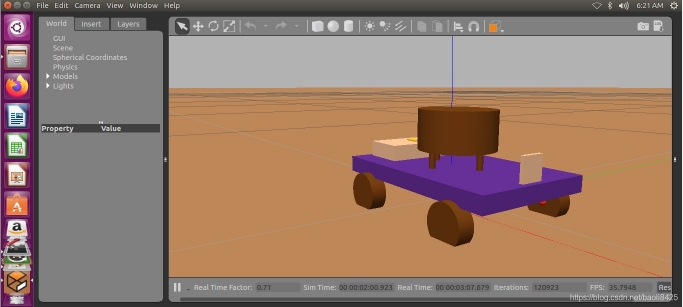
本项目的目的是在Gazebo仿真环境下显示一个基于阿克曼转向(Ackermann steering)的自动驾驶小车模型,在之前xacro模型的基础上添加Gazebo标签等,使小车模型具有重力、惯性和摩擦力等物理状态。
2. Gazebo简介
Gazebo是一款3D动态模拟器,能够在复杂的室内和室外环境中准确有效地模拟机器人群。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。
2.1 Gazebo的典型用途
- 测试机器人算法;
- 设计机器人;
- 用现实场景进行回归测试。
2.2 Gazebo的主要特点
- 包含多个物理引擎;
- 包含丰富的机器人模型和环境库;
- 包含各种各样的传感器;
- 程序设计方便和具有简单的图形界面。
3. ros_control
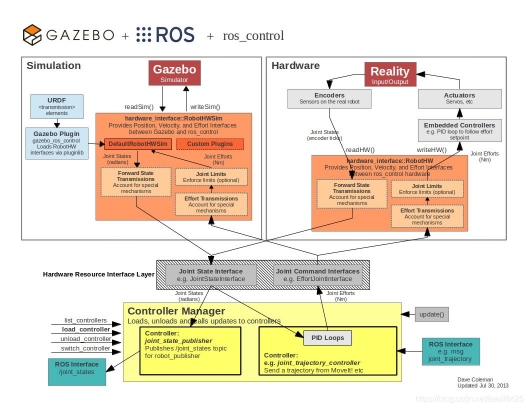
如上图所示,ros_control为Gazebo仿真提供了一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等。通过向URDF模型文件中添加Gazebo插件,从而将Gazebo仿真模型与ros_control建立起联系。controller可以实现对URDF模型中每个joint的控制,并且提供了PID控制器,Controller Manager则提供了一种通用接口,负责管理不同的controller。
4. 配置物理仿真模型
4.1 为link添加惯性参数和碰撞属性
<collision>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
</collision>
<inertial>
<origin xyz="0 0 0.055"/>
<mass value="1.0" />
<inertia ixx="${1*(0.16*0.16+0.02*0.02)/12}" ixy="0.0" ixz="0.0" iyy="${1*(0.25*0.25+0.02*0.02)/12}" iyz="0.0" izz="${1*(0.16*0.16+0.25*0.25)/12}"/>
</inertial>
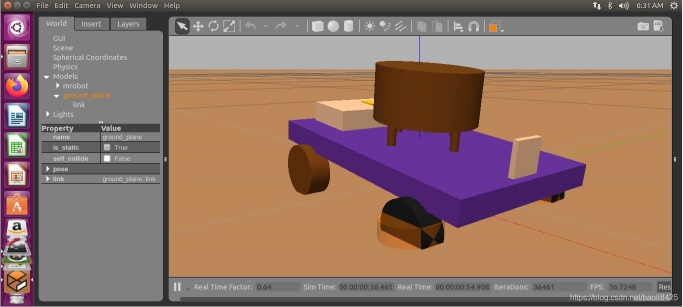
如果模型仅需要在Rviz中显示,则上述<collision>标签和<inertial>标签可以不添加。在为模型添加了collision碰撞属性后,该link的collision属性与link的visual属性在形状大小和位置角度上都应当保证重合,可在Gazebo菜单栏中添加collision属性的显示,即如下图所示。
若如下图所示,某个link的collision属性与link的visual属性没有重合,则小车无法正常运动。
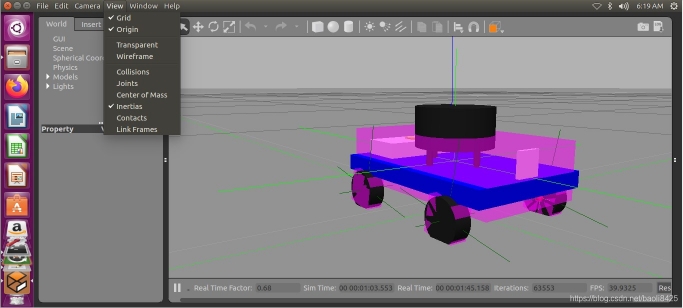
同样的在为模型添加了inertial惯性参数后,每个link都会显示一个带有绿色轴的紫色框,每个框的中心应当与其link的指定重心对齐,可在Gazebo菜单栏中添加inertial属性的显示,即如下图所示。
关于惯性矩阵的公式推导和计算可自行上网搜寻,以下为资料链接的分享:
https://wenku.baidu.com/view/8444fe93aa00b52acfc7cae5.html
4.2 为link添加Gazebo标签
4.2.1 颜色
<gazebo reference="base_link">
<material>Gazebo/Blue</material>
</gazebo>
说明:
- 该标签的作用是定义某个link在Gazebo中显示的颜色。虽然在<visual>标签中已经对link的颜色进行了定义,但只是定义了模型在Rviz中显示的颜色,而Gazebo所能够提供的颜色标签可参考:
http://wiki.ros.org/simulator_gazebo/Tutorials/ListOfMaterials
4.2.2 重力
<gazebo reference="base_footprint">
<turnGravityOff>false</turnGravityOff>
</gazebo>
说明:
- base_footprint这个link是作为小车本体在地面上的映射,本身并没有任何物理意义,因此通过<turnGravityOff>标签将该link的重力属性关闭。
4.3 为joint添加传动装置
Gazebo中的仿真都是基于物理引擎的,因此要想让一个模型运动,从本质上讲,必须要有力施加在模型上,就实际而言,我们必须在模型上加上执行器(通常情况下就是电机),让模型运动起来。
<transmission>标签主要的针对对象是joint(因为一般两个link连接处的地方如果是非固定的,那么一定会存在一个执行装置来改变两个link的相对位置),<transmission>标签的作用就是给某个joint与某类执行器相结合,有了执行器的作用,Gazebo就可以在物理层面上对模型进行驱动了。
这里以前轮转向机构为例进行说明,具体代码如下。
<!-- Transmission is important to link the joints and the controller -->
<transmission name="right_bridge_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="right_bridge_to_bridge" >
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
</joint>
<actuator name="right_bridge_joint_motor">
<hardwareInterface>hardware_interface/EffortJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
<motorTorqueConstant>100</motorTorqueConstant>
</actuator>
</transmission>
说明:
- <transmission>标签唯一指定了一个传动的标签,name可以自己定义,也可以与joint名相同。
- <type>标签指定了传动的类型,选择transmission_interface/SimpleTransmission即可。
- <joint>标签(可定义一个或多个)指定这个传动所依赖的关节,拥有如下标签<hardwareInterface>。
- <hardwareInterface>(在joint下,可定义一个或多个)指定支持的硬件接口空间。用于结合控制器使用硬件接口来向硬件接口发送和接受指令,请注意:
①当在RobotHW中加载此transmission时,此标签的值应为hardware_interface / XXX。
②在Gazebo中加载此transmission时,此标记的值应为XXX。
- <hardwareInterface>(在joint下,可定义一个或多个)指定支持的硬件接口空间。用于结合控制器使用硬件接口来向硬件接口发送和接受指令,请注意:
- <actuator>标签(定义一个或多个)指定了与joint传动连接的执行器,名字可以随意定义,拥有如下标签<mechanicalReduction>、<hardwareInterface>及<motorTorqueConstant>。
- <mechanicalReduction>(可选)定义了电机/关节减速比。
- <hardwareInterface>(可选,只有Indigo及以前版本的在这里指定,目前版本已经移到joint标签下)定义了支持的硬件接口。
- <motorTorqueConstant>(可选)定义了电机的转矩参数。
4.4 为部分link添加阻尼系数和摩擦系数(可选)
这里以车轮为例,具体代码如下。
<gazebo reference="right_back_wheel">
<mu1>100000000</mu1>
<mu2>100000000</mu2>
<kp>100000000</kp>
<kd>1</kd>
<minDepth>0.01</minDepth>
<maxVel>100</maxVel>
</gazebo>
说明:
- <mu1>和<mu2>表示沿接触表面的两个不同接触方向的摩擦系数μ,其中<mu1>表示库仑摩擦系数,它的范围必须在0到无限大之间,0表示无摩擦接触,而无限大表示永不打滑的接触。请注意,无摩擦接触比具有摩擦的接触要花费更少的时间,并且无限摩擦的接触要比具有有限摩擦的接触损耗更大。这个值必须始终被设置。而<mu2>如果未设置,则在两个摩擦方向上都使用<mu1>。 如果设置,则将<mu1>用作摩擦方向1,将<mu2>用作摩擦方向2。
- <kp>和<kd>表示由Open Dynamics Engine (ODE)定义的刚体接触的接触刚度kp和阻尼kd(ODE使用erp和cfm,但是erp/cfm与刚度kp/阻尼kd之间存在映射关系)。
- <minDepth>表示施加接触校正脉冲之前的最小允许深度。
- <maxVel>表示最大接触修正速度截断项。
附Gazebo官网相关链接:
http://gazebosim.org/tutorials?tut=ros_urdf&cat=connect_ros
4.5 添加ros_control插件
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace></robotNamespace>
<robotParam>robot_description</robotParam>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<legacyModeNS>true</legacyModeNS>
</plugin>
</gazebo>
说明:
- gazebo_ros_control是Gazebo的一个插件用来根据设定装载合适的硬件接口和控制器。这个实现非常简单,由于Gazebo的插件系统具有很强的扩展性, 使得一些高级玩家可以在ros_control和Gazebo之间创建自己的机器人硬件接口。
这里我们没有为标签<gazebo>添加属性reference,这样它就是对整个机器人<robot>的描述。gazebo_ros_control的<plugin>标签还可以通过如下的子标签指定一些参数:
- <robotNamespace>用来定义插件其对象的ROS命名空间,默认是URDF或者SDF对应的机器人名称。
- <contolPeriod>用来定义控制器的更新周期,单位为秒,默认使用Gazebo的周期。
- <robotParam>用来定义ROS参数服务器上的机器人描述(URDF)路径,默认是”/robot_description”。
- <robotSimType>用来定义机器人仿真接口所使用的插件库名称,默认是”DefaultRobotHWSim”。
- <legacyModeNS>用来兼容之前ROS版本的配置。
5. 配置ros_control控制器
在config文件夹目录下创建smartcar_joint.yaml,并输入如下代码:
joint_state_controller:
type: "joint_state_controller/JointStateController"
publish_rate: 50
rear_right_velocity_controller:
type: "velocity_controllers/JointVelocityController"
joint: right_back_wheel_joint
pid: {p: 100.0, i: 0.01, d: 10.0}
rear_left_velocity_controller:
type: "velocity_controllers/JointVelocityController"
joint: left_back_wheel_joint
pid: {p: 100.0, i: 0.01, d: 10.0}
right_bridge_position_controller:
type: "effort_controllers/JointPositionController"
joint: right_bridge_to_bridge
pid: {p: 40.0, i: 0.0, d: 1.0}
left_bridge_position_controller:
type: "effort_controllers/JointPositionController"
joint: left_bridge_to_bridge
pid: {p: 40.0, i: 0.0, d: 1.0}
用.yaml文件创建一个配置文件用来配置控制器类型和保存各个关节的PID参数,这些参数将通过launch文件加载到参数服务器上。
6. 在Gazebo中添加传感器插件
6.1 摄像头
<!-- camera -->
<gazebo reference="camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
说明:
<gazebo reference="camera_link">- 这个插件是用来描述link、joint的,其本身是一种虚无的属性描述,因此需要关联相应的实体。我们通过<reference>来定义关联的link或者joint,这里关联的是camera_link。
<sensor type="camera" name="camera1">- 声明插件的类型,并为该插件取一个唯一的名称。
<update_rate>30.0</update_rate>- 设置摄像头数据更新的最大频率。
<horizontal_fov>1.3962634</horizontal_fov>- horizontal_fov是指horizontal field of view(水平方向上的视场),此处设置视场大小。
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
- 设置图像的分辨率和色彩格式。
<clip>
<near>0.02</near>
<far>300</far>
</clip>
- 设置摄像头可视的最短距离和最远距离。
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
- 此处为图像添加噪声,噪声类型为高斯噪声,设置高斯噪声的均值和标准差。噪声是在每个帧的每个像素上独立采样的,该像素的噪声值会添加到其每个颜色通道中,范围在[0,1]内。
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">- 关联摄像头插件,该插件已经在Gazebo中实现,所以直接关联即可。
<cameraName>camera</cameraName> - 设置摄像头消息的命名空间。
<imageTopicName>image_raw</imageTopicName>- 设置发布的摄像头图像话题名。
<cameraInfoTopicName>camera_info</cameraInfoTopicName>- 设置发布的摄像头信息话题名。
<frameName>camera_link</frameName>- 设置摄像头数据所在的参考系。
<hackBaseline>0.07</hackBaseline>- 此处在ros.wiki上的解释是Hack for right stereo camera,默认为0。
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
- 设置摄像头图像的畸变参数,默认为0。
6.2 激光雷达
<gazebo reference="laser_link">
<sensor type="ray" name="head_hokuyo_sensor">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<!-- Noise parameters based on published spec for Hokuyo laser
achieving "+-30mm" accuracy at range < 10m. A mean of 0.0m and
stddev of 0.01m will put 99.7% of samples within 0.03m of the true
reading. -->
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so">
<topicName>laser/scan</topicName>
<frameName>laser_link</frameName>
</plugin>
</sensor>
</gazebo>
激光雷达的插件与摄像头相似,不再做详细说明。
6.3 IMU
<!-- IMU sensor -->
<gazebo reference="imu_link">
<gravity>true</gravity>
<sensor name="imu_sensor" type="imu">
<always_on>true</always_on>
<update_rate>100</update_rate>
<visualize>true</visualize>
<topic>__default_topic__</topic>
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<topicName>imu</topicName>
<bodyName>imu_link</bodyName>
<updateRateHZ>100.0</updateRateHZ>
<gaussianNoise>0.0</gaussianNoise>
<xyzOffset>0 0 0</xyzOffset>
<rpyOffset>0 0 0</rpyOffset>
<frameName>imu_link</frameName>
</plugin>
<pose>0 0 0 0 0 0</pose>
</sensor>
</gazebo>
IMU的插件与摄像头相似,不再做详细说明。
6.4 检查传感器插件
打开一个新的终端,输入如下指令。
$ rostopic list终端界面将会打印出目前所有的topic话题。
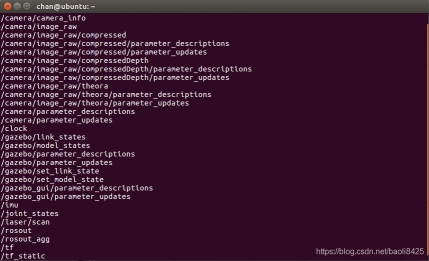
其中/camera、/imu和/laser分别对应摄像头、IMU和激光雷达的消息话题。
6.5 传感器消息可视化
6.5.1 摄像头图像的显示
输入如下指令,打开Rviz。
$ rosrun rviz rviz在Rviz的左菜单栏中添加Camera的可视化插件,并在Topic中选择摄像头图像的消息话题/camera/image_raw。
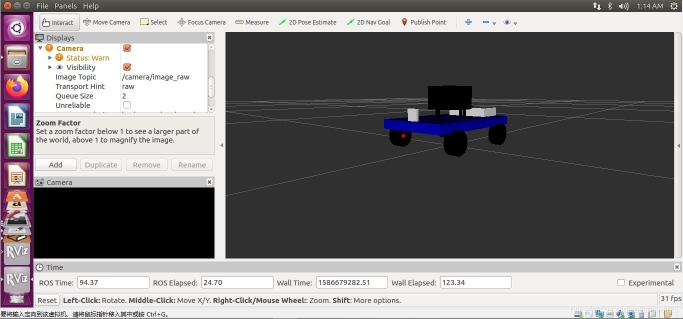
注意:在虚拟机中运行摄像头仿真图像,会出现如上图所示的图像显示问题,建议使用双系统。
6.5.2 激光雷达点云的显示
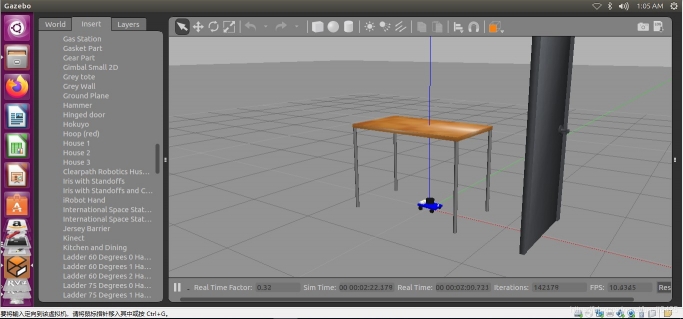
在Gazebo仿真环境中添加一些已有的模型,将模型放在小车周围合适的范围内。
打开一个新的终端,输入如下指令,打开Rviz。
$ rosrun rviz rviz在Rviz工具的左菜单栏中添加如下所示LaserScan的可视化插件。
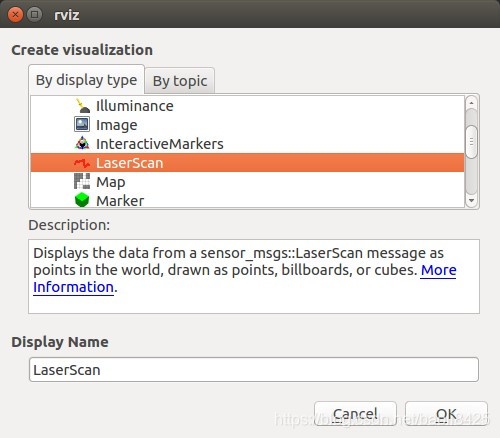
同时在LaserScan中的Topic选择激光雷达的消息话题/laser/scan,即如下图所示,Rviz能够显示出小车周围障碍物的点云信息。

6.5.3 IMU姿态的显示
在Gazebo菜单栏的Window中选择Topic Visualization,跳出如下界面。
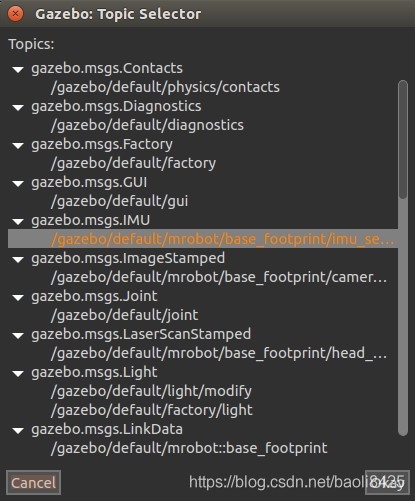
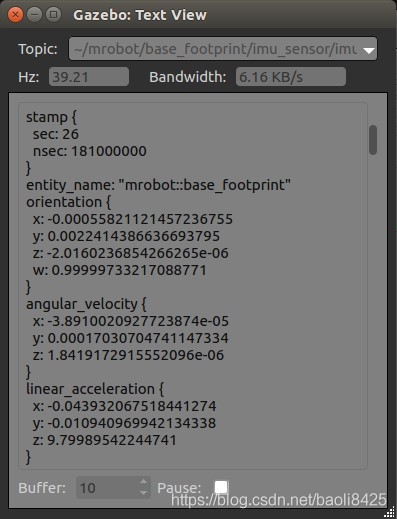
选择gazebo.msgs.IMU,跳出如下界面。如下图所示,IMU消息可分成三个部分,分别为以四元数表示的姿态信息、角速度和线性加速度在xyz三轴上的分量。
7. 搭建Gazebo仿真环境
在Gazebo上方的菜单栏中选择Edit -> Building Editor,出现如下界面。
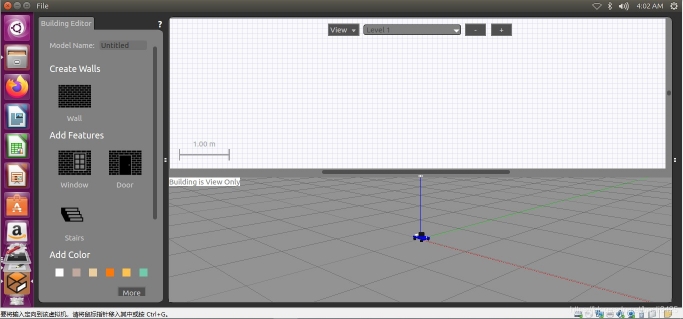
在左边的工具栏中选择Walls,将小车仿真环境的轮廓画出来,然后再选择Features添加门、窗和楼梯等。双击门窗会打开一个Inspector窗口,可以修改位置和尺寸。另外在工具栏中还可以选择修饰墙的颜色和纹理等细节。
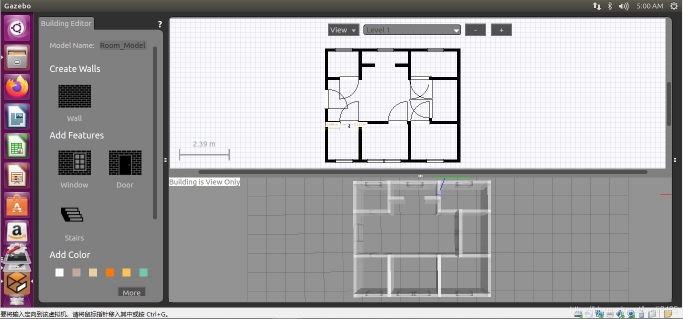
完成仿真环境的绘制后,在Gazebo上方的菜单栏中选择File-Save as保存文件。



评论(0)
您还未登录,请登录后发表或查看评论