

系列文章目录
一、lanelet2简介
二、lanelet2地图制作
前言
本篇讲述如何基于激光雷达制作自己的osm高精地图
需要提前准备:
1.pcd点云文件,激光雷达通过slam得到的点云图,slam算法可以用ALoam、ndt_mapping等,激光slam不能滤除地面,可以适当降采样。数据采集装置最好配备GPS,否则slam误差较大。
2.查MGRS分区网站MGRS Mapper (Free Version) | Operational Graphics Tool for Junior Military Leaders![]() https://mgrs-mapper.com/app3.在线osm地图制作网站
https://mgrs-mapper.com/app3.在线osm地图制作网站
 https://tools.tier4.jp/feature/vector_map_builder_ll2/
https://tools.tier4.jp/feature/vector_map_builder_ll2/一、查MGRS分区
鼠标定位到自己采集数据的地方,下方MGRS即为需要的结果。
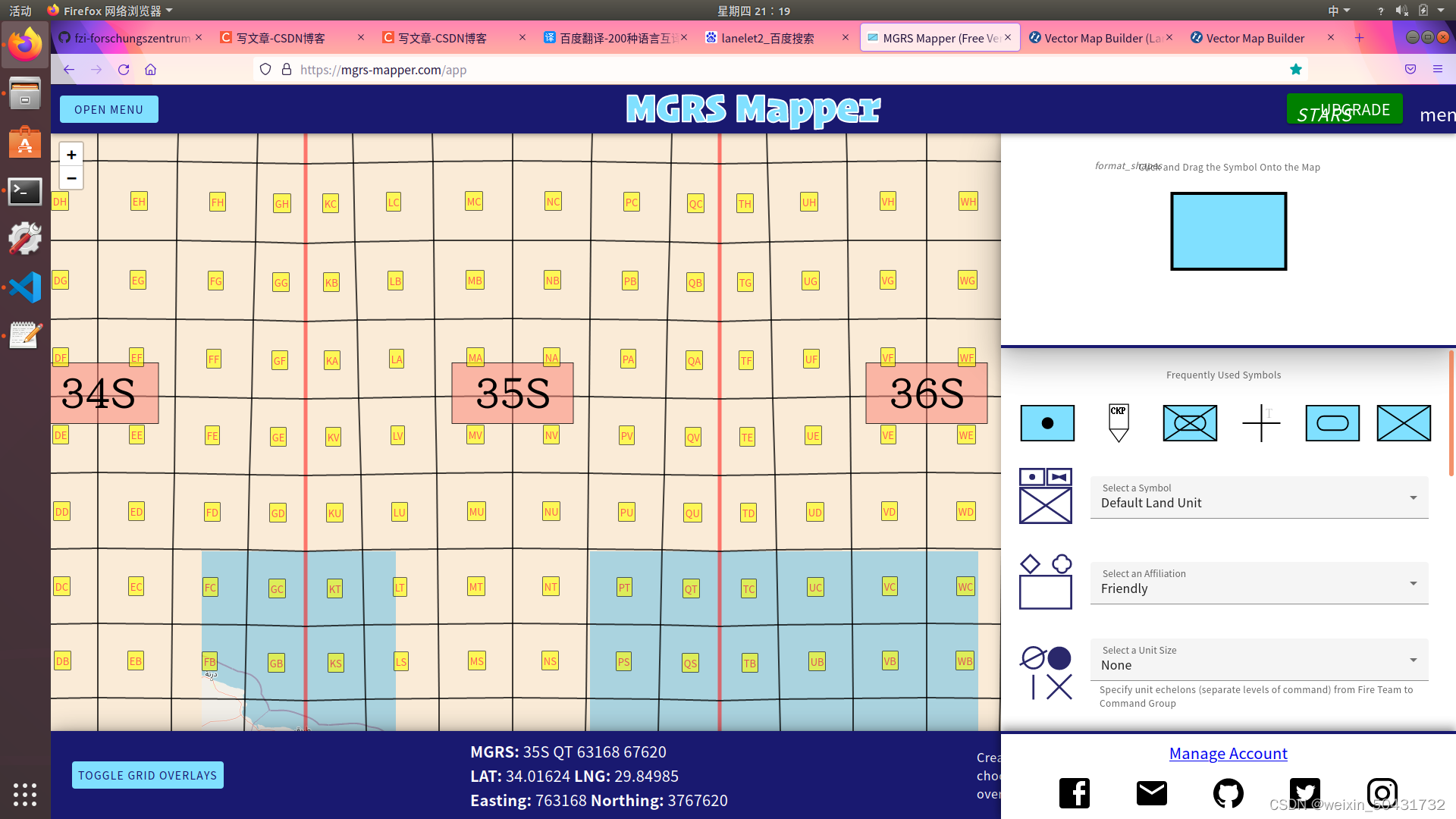
这里比如:50S MK
二、制作地图
1.初始化
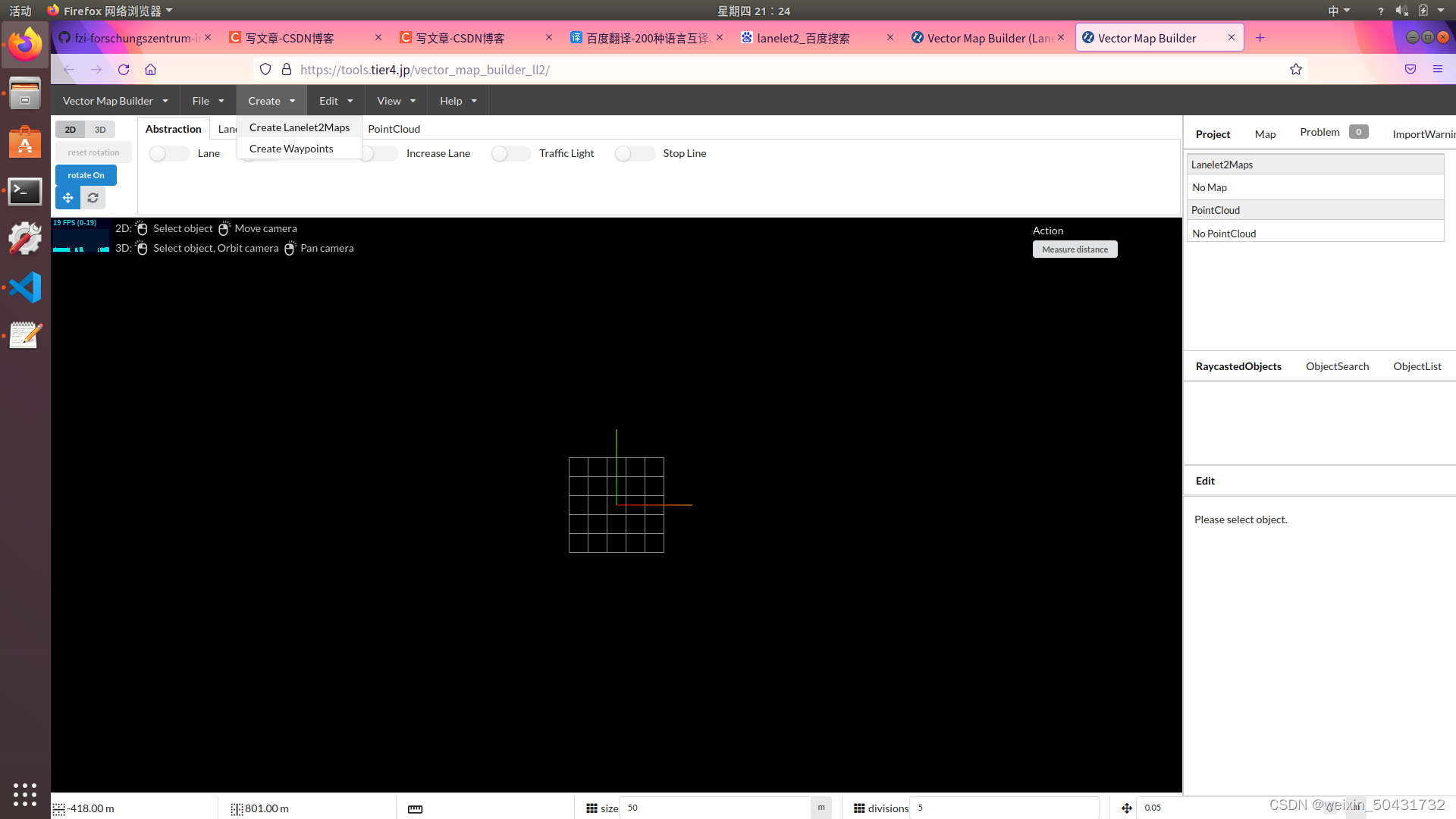
点击Create,选择Create Lanelet2Maps。

在MGRS grid zone区域输入第一步获得的MGRS分区,后一个空(xx)位置填上MK,再点击Create。
2.导入数据
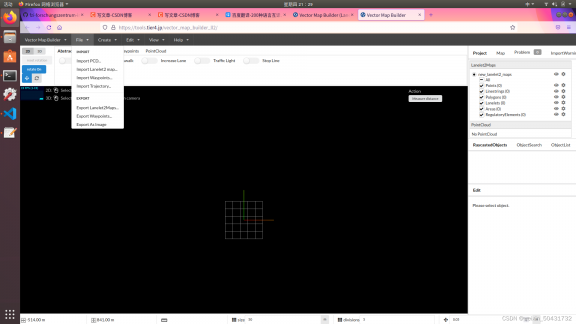
点击file,选择import PCD,选择本地pcd文件。
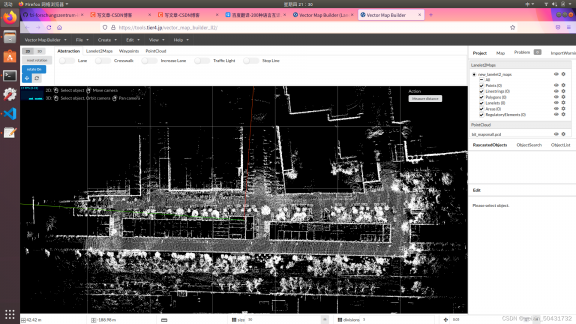
数据导入后如图,左键按住拖动旋转,右键按住拖动移动,滚轮放大缩小。
3、绘制道路
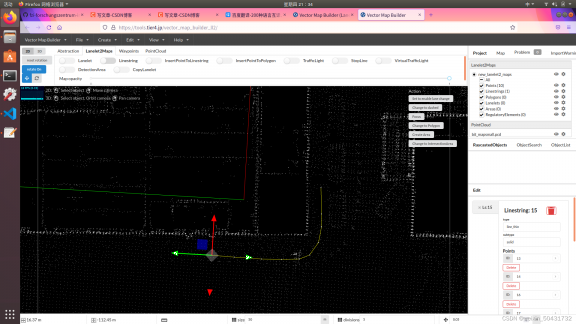
点击Linestring,鼠标在适当的位置连续点击,生成一组点并连接成线,完成后再点击Linestring选项卡关闭功能。点击的点固定于PCD点云的某一点上,因此不能地面分割,否则道路分界线无法固定。
下一次若想承接上一条Line,则先选定该Line再点击Linestring,此时新的点会自动与上一条Line的最后一点连接。若重新开始绘制一条Line,则须保持当前没有元素被选中,再点击Linestring。
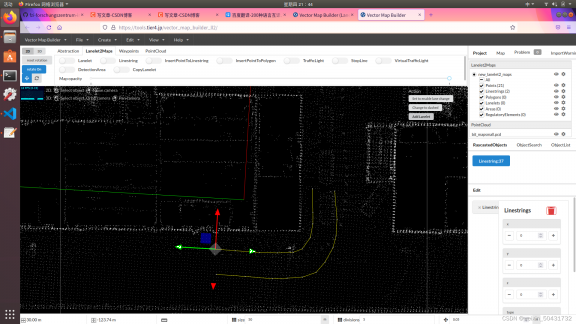
绘制出两条Line后,同时选中两者,点击ADD Lanelet即可生成一段道路 。
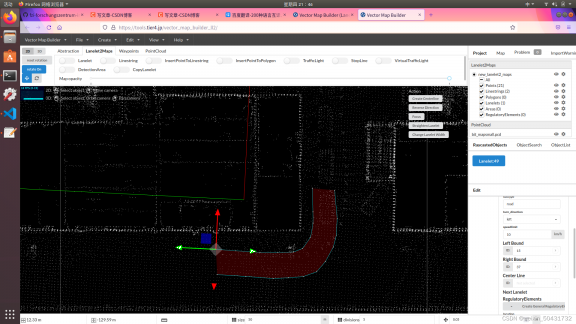
选中Lanelet,在右下角可以设置属性,包括限速,道路方向等,next Line当两段Lanelet制作完成后由系统生成,自己无法设置。

选中Line的一个端点,再选择Linestring,则以该点为新的Line的起点,继续绘制。绘制完两条Line再使用同样的操作产生新的Lanelet,上一条Lanelet自然有了next line,变为绿色背景,红色背景表示警告,可能缺失部分信息。

选中某Lanelet后,可以使用右上角的辅助工具微调减少手工绘制误差,直道可以使用Striaghten Lanelet修正,还可以使用Change Lanelet Width设置道路宽度,reverse direction反转道路走向。

添加红绿灯,选择某Lanelet,再选中TrafficLight,将其放置在合适的位置,关键调整附带生成的Stop Line位置,这里只为了更好的可视化效果,对于地图本身来说,红绿灯已经与该lanelet绑定,不影响计算机从osm文件读取道路信息。 Stop Line需与Lanelet相交,否则会出像警告。
还有很多其他功能......
4.保存数据
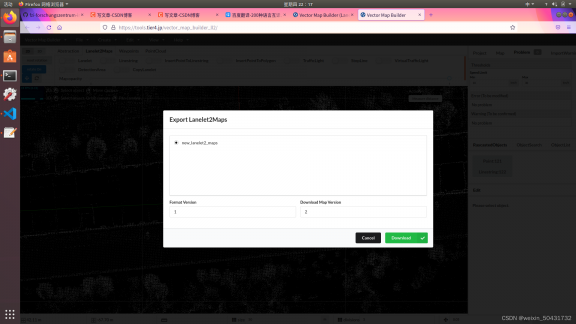
全部完成后选择File,Export Lanelet2Maps保存osm文件。
三、ROS中查看
使用AdamShan改进的ros包可以直接查看
GitHub - AbangLZU/ad_with_lanelet2: sample of ad system to use lanelet2 framework
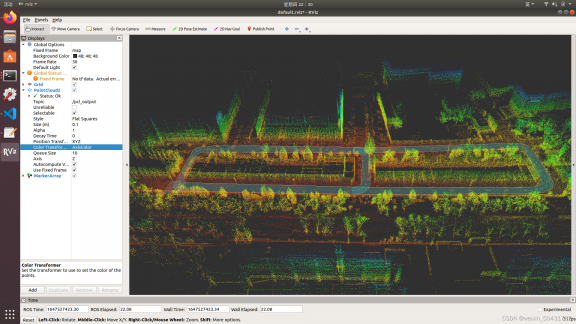
嘿嘿嘿,懒...只画了一条车道...
总结
本文介绍了手工制作小型osm高精地图过程。
欢迎交流,联系Q1456055290

评论(0)
您还未登录,请登录后发表或查看评论