
无人机开发基础入门(三维仿真方向),做无人机路径规划/视觉算法开发。
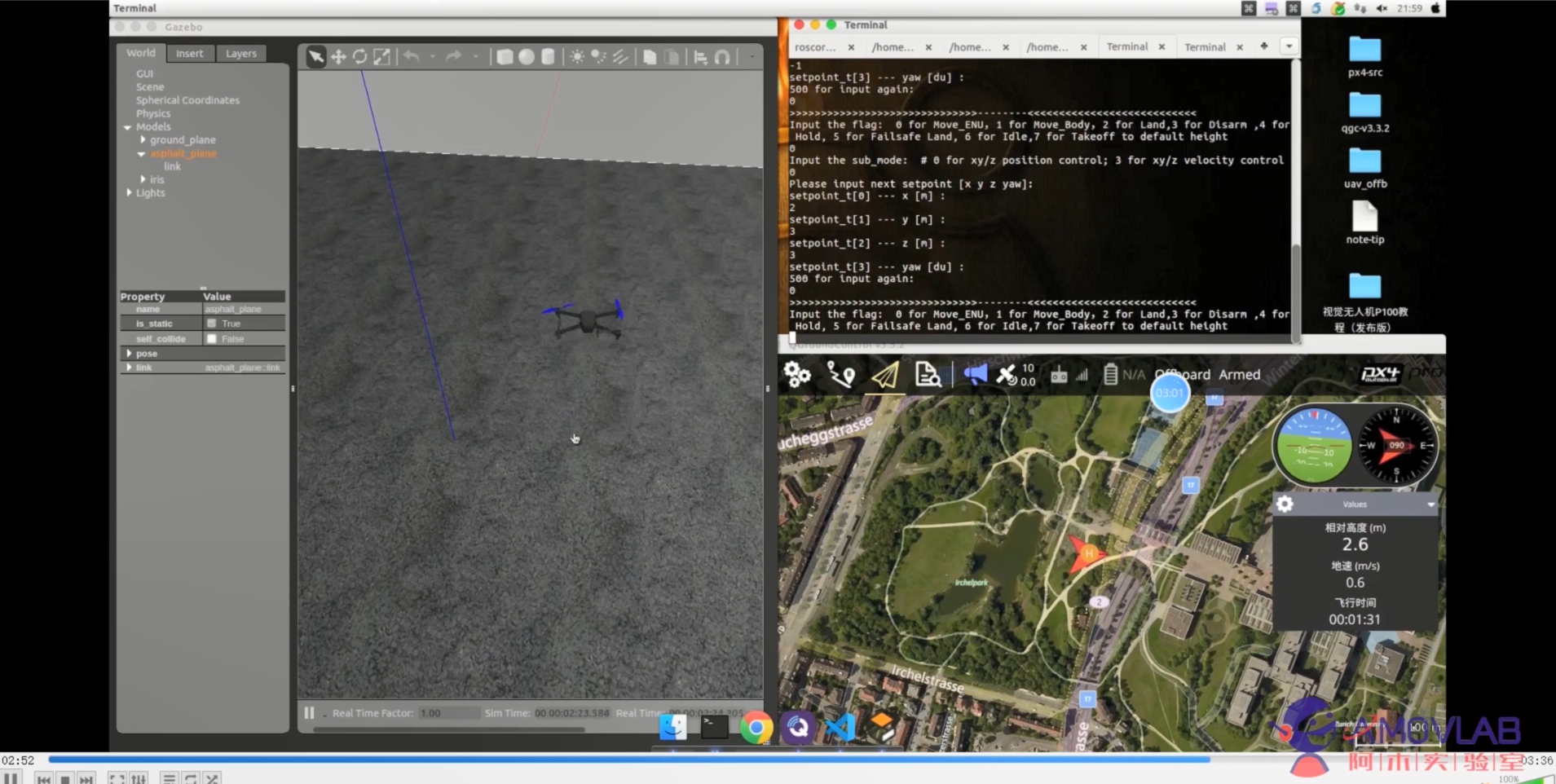
通过本课程提供的完整代码框架,在没有真实的无人机条件下,你将学到PX4无人机三维仿真开发,包含智能无人机开发仿真环境搭建,无人机自主飞行初步,无人机激光雷达避障自主飞行,方便大家做进一步的智能开发,涉及路径规划,自主决策等。在这个基础上实现强化学习,视觉追踪引导,激光/视觉SLAM等研发工作,本课程还提供一些例程DEMO提供完整的接口。
阿木实验室创始人,多年来在国内循环授课,教授无人机研发流程,在教学方面有着丰富的经验。
第一章:仿真系统软件硬件框架及其系统安装 1.1系统概述 1.2软件构架 1.3硬件要求 1.4启动盘制作 1.5系统安装 第二章:仿真系统软件介绍及其初步使用 2.1软件安装 2.2代码更新 2.3代码软件框架 2.4重新编译确认开发环境 2.5地面站模拟航点飞行 2.6键盘控制虚拟环境飞行 2.7OFFBOARD模式自动飞行一个圆形 2.8二维激光雷达避障飞行 第三章:仿真系统ROS/GAZEBO例程代码分析 3.1系统概述 3.2 OFFBOARD自动-飞行圆例程分析 3.3激光雷达避障流程分析(VFH算法) 3.4使用PYTHON控制无人机 第四章:仿真系统与真机切换实践飞行操作 4.1真实无人机硬件安装 4.2软件脚本修改和环境配置 4.3室外真机OFFBOARD模式飞行圆
有编程语言 C / C ++、 Python 基础,有ROS基础。
微信公众号古月居后台回复“无人机708”即可获取源码等课程资料
课程限时拼团优惠中,点此访问:《无人机仿真开发》





评论(0)
您还未登录,请登录后发表或查看评论