
1,使用usb_cam ,我的相机没有深度信息。
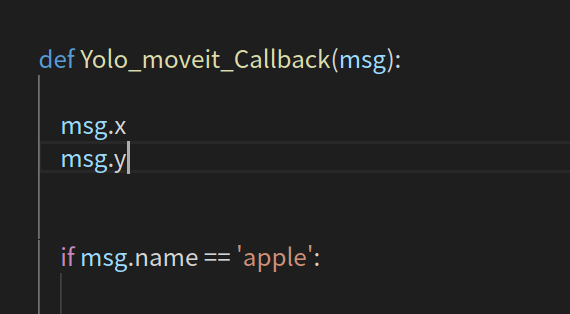
2,已经得到物体在像素中的坐标了。
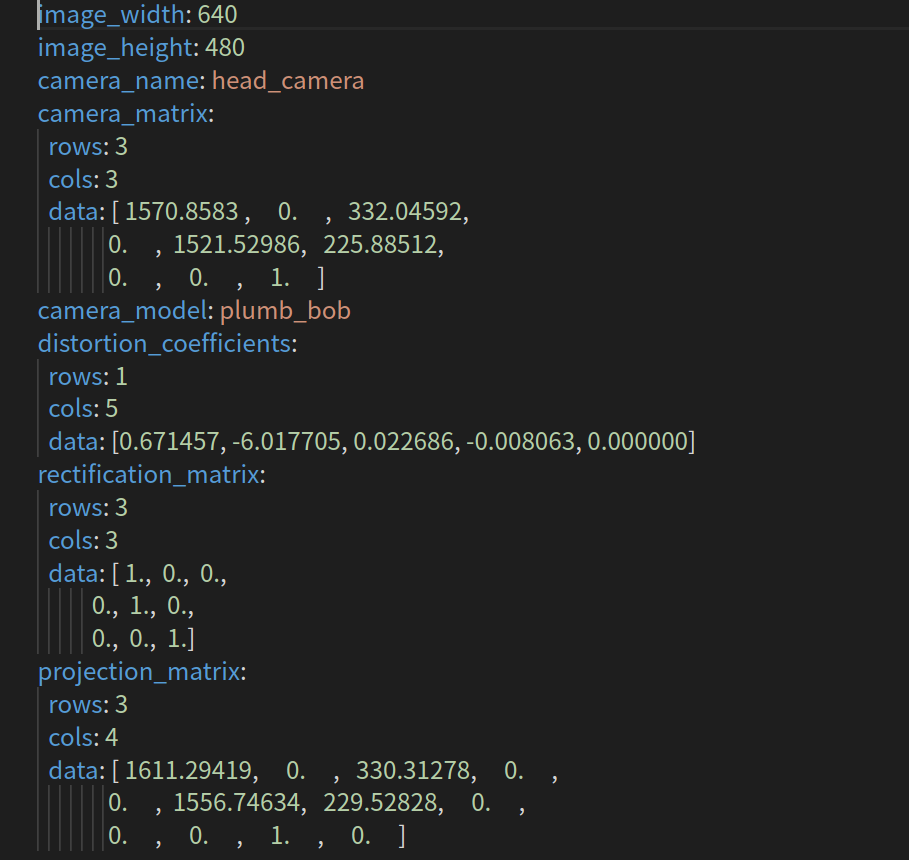
3,内外参都标定完了。
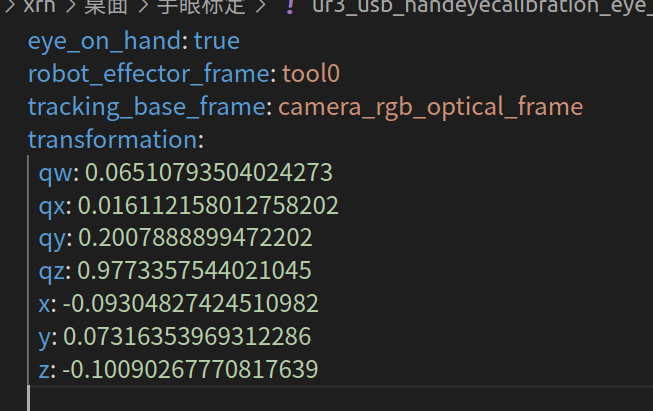
手眼标定 (使用的easy_hand 不知道这个结果对不对)
还有个小问题,这个手眼标定的矩阵是在任何位姿下都可以,还是只适用于当时标定的位姿?
现在xy都有了,是像素坐标 x:【0,640】 y:【0,480】
请问怎么样才能将像素坐标转化成世界坐标?
ros里面有没有这类工具?如果没有的话,通过什么公式可以计算得到呢?
我要做平面抓取,只要知道世界坐标的xy就好了,z是固定值。
总问:
问题1:手眼标定的数值是在任何位姿下都可以,还是只适用于当时标定的位姿?
问题2:怎么像素坐标转成世界坐标?




第三方账号登入
QQ 微博 微信