
问题描述:
- 上位机接收不到小车发布的数据;
- Rviz即可查看机器人的实时位姿,显示No tf data
环境情况:
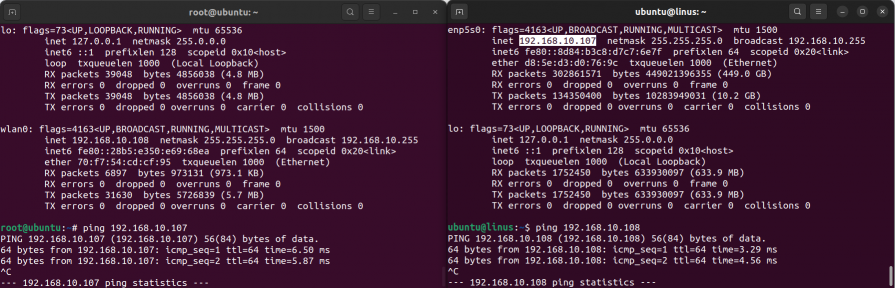
root@ubuntu 为小车终端,ubuntu@linux为上位机终端
上位机版本
```
Ubuntu 22.04.1
Linux version 5.19.0-40-generic (buildd@lcy02-amd64-047) (x86_64-linux-gnu-gcc (Ubuntu 11.3.0-1ubuntu1~22.04) 11.3.0, GNU ld (GNU Binutils for Ubuntu) 2.38) #41~22.04.1-Ubuntu SMP PREEMPT_DYNAMIC Fri Mar 31 16:00:14 UTC 2
ROS2 humble
```
1. 上位机和小车之间可以相互ping通,两个网络均开启了广播 BROADCAST
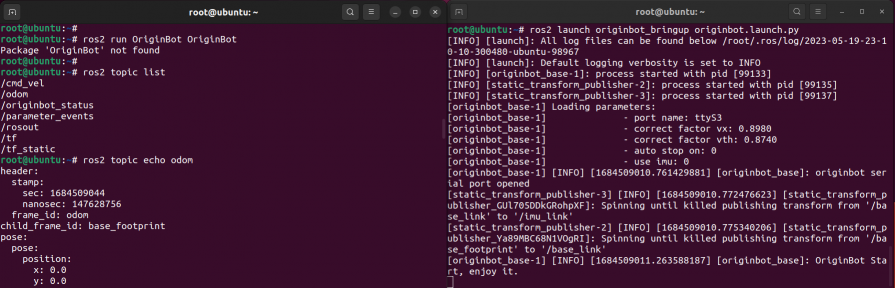
2. 小车程序确保启动,小车终端可以看到topic,并且echo odom有内容输出
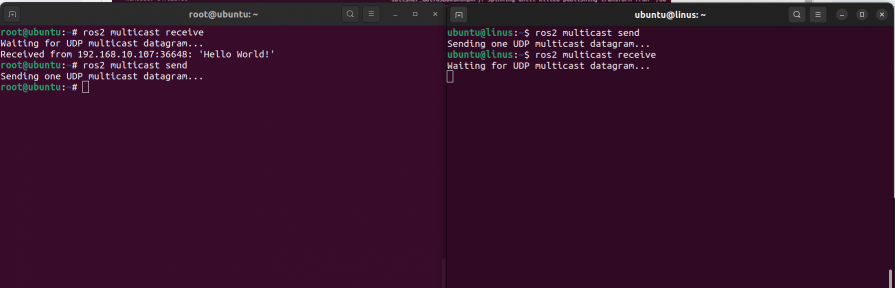
3. 上位机广播,小车可以成功接收;而小车广播,上位机接收不到
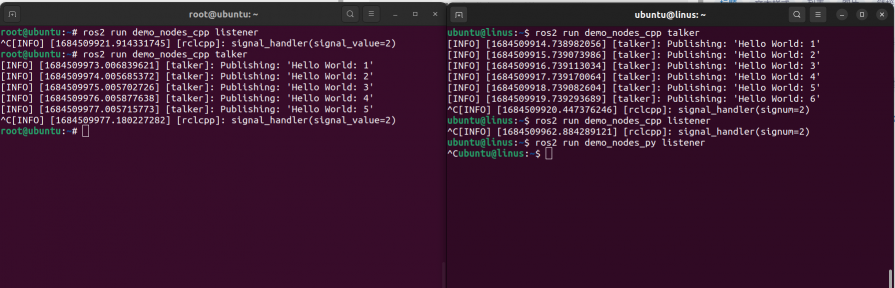
4. 两者作为listener和talker,相互都监听不到
5. 使用Rviz即可查看机器人的实时位姿,显示No tf data

群里也有其他同学碰到了同样的问题,能否重视一下帮忙解决?
相同问题
http://www.guyuehome.com/bubble/detail/id/67269
http://www.guyuehome.com/bubble/detail/id/67281




第三方账号登入
QQ 微博 微信