

项目描述
在模拟垄间、模拟树苗作业,遍历垄道,判断树苗状态是否需要施药,若需要施药,则机器要有施药作业。用STM32做运动控制和逻辑控制。旭日x3做识别和扫码,用串口与MCU通信。用光电开关判断垄间和垄,距离传感器使用超声波,姿态传感器JY61,作业机构使用步进电机驱动,底盘使用直流编码电机,tb6612作驱动。TPS54160做降压稳压电源。
硬件和材料列表
旭日x3派
stm32f407vet6
tb6612
TPS54160
JY61
开发环境
cubemx keil 旭日x3 AD
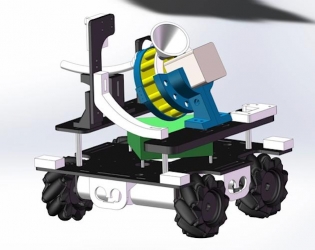
安装部署过程展示
结构设计
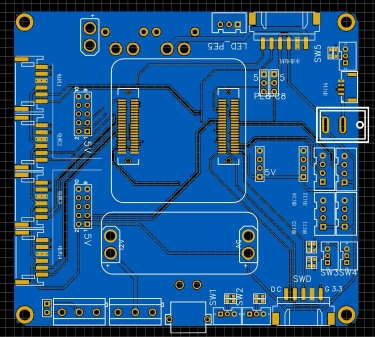
总成板硬件PCB设计
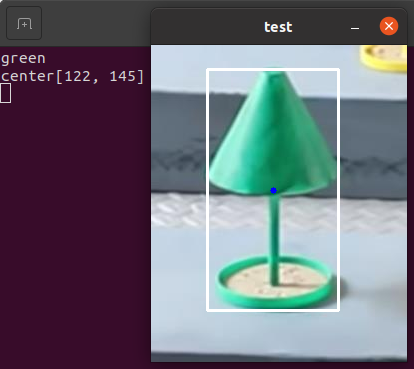
识别定位模型
作业效果
最终整体效果
项目笔记
#旭日x3派x东方红B类#从点亮板卡开始#旭日x3派x东方红B类#(二)图像处理中的卷积
#旭日x3派x东方红B类#(三)图像处理学习笔记
#旭日x3派x东方红B类#(四)在x3派上配置qtcreator+opencv开发环境、实现串口通信、解决无线远程控制方法
#旭日x3派x东方红B类#(五)使用opencv基于颜色的模型识别和定位
#旭日x3派x东方红B类#(六)实时调节选取颜色阈值的小程序
#旭日x3派x东方红B类#(七)使用卡尔曼滤波最优化估计目标位置





评论(0)
您还未登录,请登录后发表或查看评论