

基于ROS的两轮应急巡检车进行中
本项目为基于ROS的两轮应急智能巡检机器人,该移动机器人搭载红外、雷达、IMU、相机、传感器等智能装置或设备,基于识别,分析算法、环境内各相关因素,实现机器人的自主导航以及监测、预警和处理的系统。
项目描述
本项目为基于ROS的两轮应急智能巡检机器人,该移动机器人搭载红外、雷达、IMU、相机、传感器等智能装置或设备,基于识别,分析算法、环境内各相关因素,实现机器人的自主导航以及监测、预警和处理的系统。
底层移动机器人使用基于stm32f103c8t6芯片的嵌入式控制系统及重新设计的驱动电路,搭载深度相机、IMU等多种传感器模块及远程通信模块。
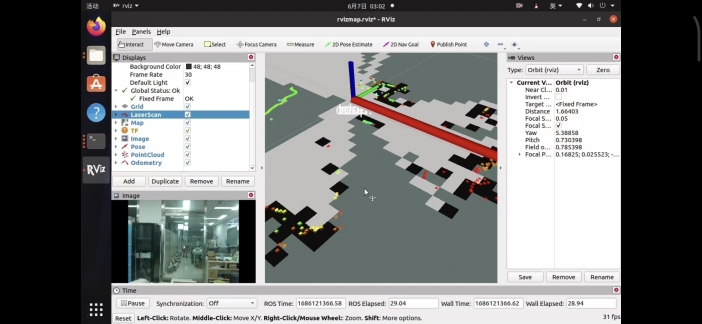
上位机使用旭日X3派,搭载ROS操作系统,并应用gmapping、hector、cartographer等激光slam算法实现ROS机器人的建图,优化路径规划算法,优化启发函数,使其有高效,稳定的寻径功能。使用并优化teb、mpc、以及pure pursuit等算法实现机器人的自主导航与避障。
综合控制平台中使用QT开发可视化人机交互界面,平台接收移动机器人远程监测画面及各传感器数据信息,同时能够远程发送指令实现人工控制,支持TCP/IP网络通信协议、可实现WiFi、远程ssh等。
硬件和材料列表
激光雷达*1
MPU6050*1
深度相机*1
超声波传感器*3
i5主控*1
stm32f103c8t6单片机*1
SAC6010v3电机*2
36v锂电池*1
12v锂电池*2
开发环境
ubuntu20.04
安装部署过程展示


项目笔记
基于ROS的两轮应急巡检车系列(一)旭日X3初体验及基于ubuntu20.04的ROS安装基于ROS的两轮应急巡检车系列(二)ROS与STM32的串口通信
基于ROS的两轮应急巡检车系列(三)两轮差速机器人轮式里程计编写
基于ROS的两轮应急巡检车系列(四)上位机底层代码的简单实现
基于ROS的两轮应急巡检车系列(五)基于旭日x3的智能车建图与导航流程实现
安全事项
注意用电参考文献





评论(0)
您还未登录,请登录后发表或查看评论