文章目录
-
- ① 背景
- ② 前提
- ③ 任务
-
- Ⅰ准备
- Ⅱ 使用actions
- actions 命令
-
- ros2 action list
- ros2 action info
- ros action show(ros2 interface show--eloquent 这个版本有)
-
- ros2 action send_goal
- ④ 总结
① 背景
动作是ROS 2中用于长时间运行任务的通信类型之一。它们由三部分组成:目标,结果和反馈。
动作基于主题和服务。它们的功能与服务相似,但动作是可抢占的(您可以在执行时将其取消)。与返回单个响应的服务相反,它们还提供稳定的反馈。
操作使用类似于发布者-订阅者模型(在主题教程中进行描述)的客户端-服务器模型。“动作客户端”节点将目标发送到“动作服务器”节点,该节点确认目标并返回反馈和结果流。
意思就是topic是没有反馈的,action是有反馈的长连接
② 前提
③ 任务
Ⅰ准备
启动小乌龟
命令:
ros2 run turtlesim turtlesim_node
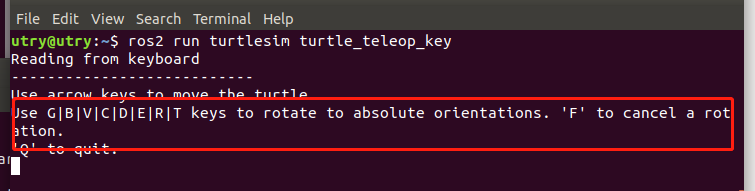
ros2 run turtlesim turtle_teleop_key
Ⅱ 使用actions
键盘控制节点这个地方就是action,使用f键周围的来控制小乌龟到指定方向,F键取消作用
演示:
是通过这个action 发送的
actions 命令
ros2 action list
列出 action

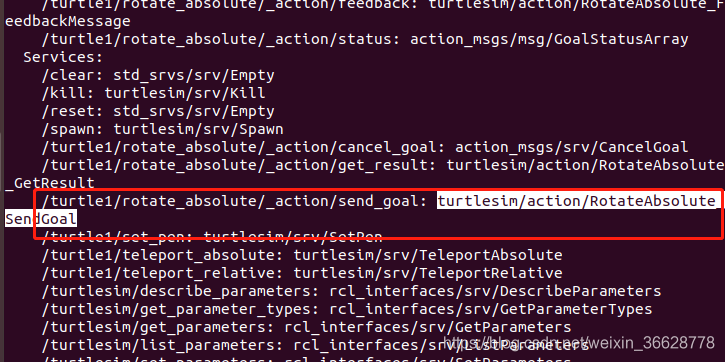
ros2 action info
看详细信息

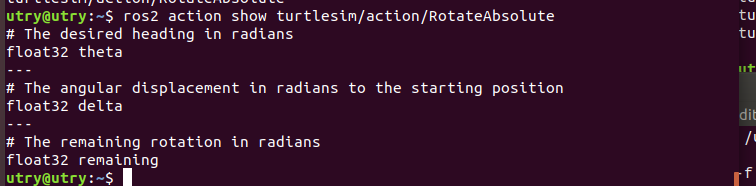
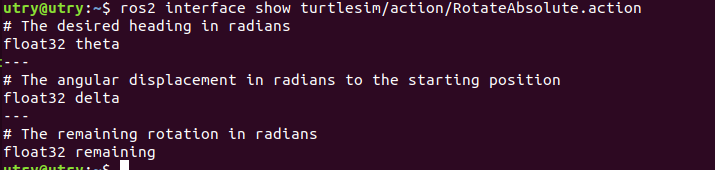
ros action show(ros2 interface show–eloquent 这个版本有)
详细信息
dashing 版本
ros2 action show turtlesim/action/RotateAbsolute
eloquent 版本
ros2 interface show turtlesim/action/RotateAbsolute.action
ros2 action send_goal
命令行发送action
ros2 action send_goal <action_name> <action_type> <values>
例子:
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute {'theta: 1.57'}
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute {'theta: -1.57'} --feedback
④ 总结
动作就像服务,可让您执行长时间运行的任务,提供定期反馈并可以取消。
机器人系统可能会使用动作进行导航。一个行动目标可以告诉机器人去某个位置。当机器人导航到该位置时,它可以沿途发送更新(即反馈),一旦到达目的地,便发送最终结果消息。
Turtlesim有一个动作服务器,动作客户端可以将目标发送给旋转的乌龟。在本教程中,您对动作进行了自省/turtle1/rotate_absolute,以更好地了解什么是动作以及它们如何工作。



评论(0)
您还未登录,请登录后发表或查看评论