

如何建立多输入多输出的运动模型,这是建立运动控制的前提。
笔记内容:
1. 轮式机器人运动学模型、坐标系与变换
2. 轮式机器人动力学模型
3. 状态方程与误差动力学模型
本文参考论文:
1.IMU-based localization and slip estimation for skid-steered mobile robots
2.Trajectory tracking with collision avoidance for nonholonomic vehicles with acceleration constraints and limited sensing
3.Performance-Oriented Coordinated Adaptive Robust Control for Four-Wheel Independently Driven Skid Steer Mobile Robot (IEEE access,内容质量不佳,不建议深入学习)
关键词:Mobile robot, skid steer, coordinated control, control allocation.
关键词解释:
Coordinated control:协调控制,即四个驱动的转速,部分文献会设计扭矩
Control allocation,控制分配的是什么?:torque allocation (文章P)
==================== 分割线 ============================
本文根据私信问题进行:
多输入多输出(MIMO)系统的控制,与单输入单输出控制系统分析过程大致相似。
参考书中多输入多输出系统会采用矩阵形式表示,矩阵形式可以直接的表示出输入与输出之间的函数映射关系。
其实,每一个输出量都可以像单输入单输出系统一样用一个解析表达式表示。在分析一个不太熟悉的控制系统时,可以先用解析方程描述一些物理模型。
所以建立多输入多输出系统描述系统,没必要直接推导出状态空间方程(控制系统也有很多种表示方式,可以认为状态空间方程是一种形式)。推导矩阵表示方程时,首先明确系统输入、输出变量,并且明确变量是否是独立的?根据物理模型以及S域或Z域形式变换才能得到系统的系统的传递函数。
系统传递函数,可以看做是融合物理模型(本构模型)与控制系统模型的数学表示方式(在S域、Z域),其中控制系统框架是根据系统传感反馈变量建立的。
例如,PID控制、前馈控制等等,都是脱离物理模型的控制方法。
控制系统都是有传递函数的,或者说系统都可以用传递函数表示,可以是“1”的直驱式的简单系统,也可以是存在微分、积分、反馈等复杂系统。所以,轮式机器人的传递函数,也是需要根据控制目标(运动轨迹、运动速度)等确定,需要根据控制对象来确定,一般是从轮子转速或者扭矩到机器人运动轨迹/速度/加速度的映射函数,同时加入噪声等因素。
====================== 分割线 ============================
轮式移动机器人,是由车轮转动驱使机器人在一定空间(平面空间)完成运动,根据作业任务目标,轮式机器人的姿态、运动轨迹或者速度需要满足设计要求。
同时,移动机器人的运动速度、加速度受驱动元件性能限制;在避障作业中,机器人感知距离与系统响应速度会影响机器人的避障性能,进而会限制机器人运动速度,避免因速度太快无法躲避障碍。
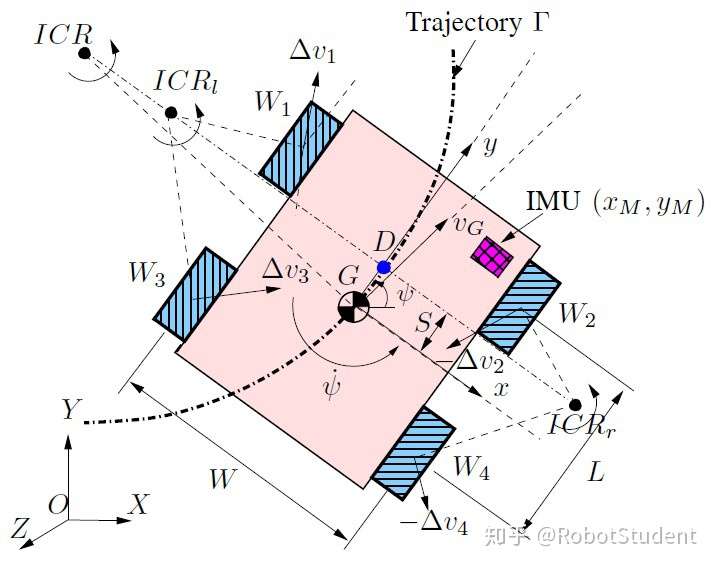
坐标变换是机器人建模分析所必须的,移动机器人运动感知信息也需要根据状态感知元件(IMU、避障感知)的安装位置进行变换。
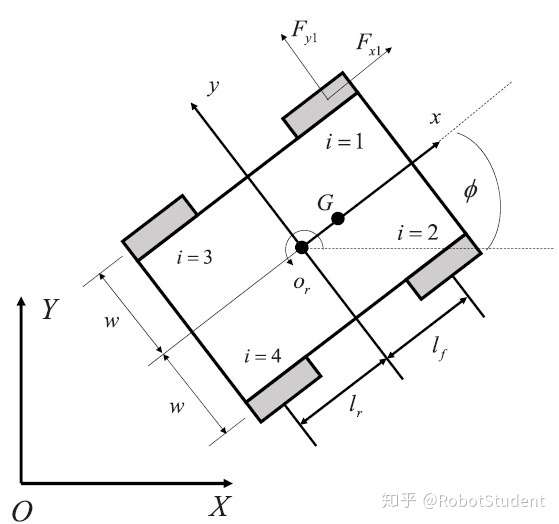
在四驱轮式移动机器人运动模型中,机器人的几何中心与重心不一定重合,即使是平面投影也不一定重合。几何中心是根据车轮拓扑结构确定的,参考图片2,机器人的重心也不一定在机器人轴线方向上,同时移动机器人上安装惯性测量单元传感器的位置也比较任意。
机器人重心会影响车轮胎摩擦力(即车轮上的驱动力)以及动力性能。

根据IMU感知系统推算机器人的动力学参数,可以参考《理论力学》通过坐标系变换得到机器人在机身坐标系、参考坐标系下的动力学参数。这部分内容会在以后的笔记中更新。

(2)
当然,根据向量分解,可以得到各类坐标系中速度元素之间的关系:
(3)
所以,可以得到机器人自身的速度在参考坐标系下的表示方式,同时对应系数可以得到相关的系数矩阵:
(4)
(5)
(6)
(7)
同时,这个多输入多输出的系统动力学模型可以表示为:
(8)
对应公式(8),联立公式(5)(7)可以得到下式:
(9)

同时,对于移动机器人的车轮存在以下关系:
(10)

(11)
对上式求导可以得到,
(12)
转换成矩阵形式有:
(13)
(14)
对公式(11)进行二次积分可以得到:
(15)
(16)
联立公式(9)(13)和(15)可以得到控制系统描述方程
(17)
控制系统中常采用差分控制形式,根据实际值与理论值的差修正控制系统输出,提高运动精度和响应速度。例如,以机器人运动轨迹作为控制系统输出,则系统的误差表示为:
(18)
联立公式(13)和(18)可以得到
(19)
联立公式(15)和(18)可以得到:
(20)
(21)
后续会更新基于IMU的运动状态估计,状态估计控制,反演控制等。



评论(0)
您还未登录,请登录后发表或查看评论