

对PPT复制,主要为了以后用到好找,没啥东西。
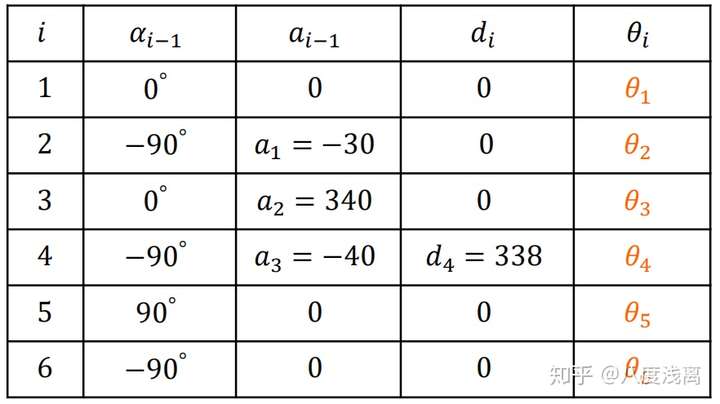
前提准备:DH表
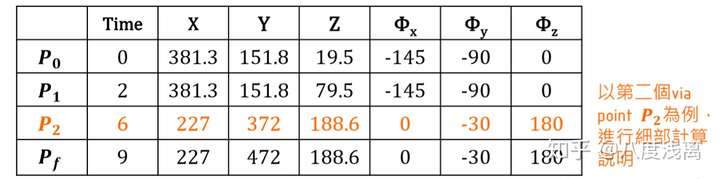
- 条件设定:

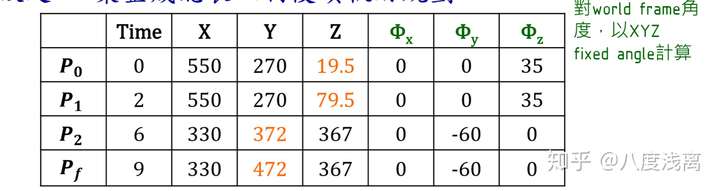
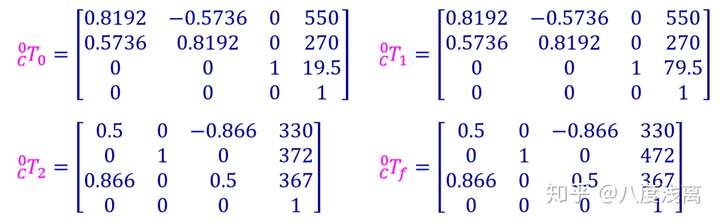


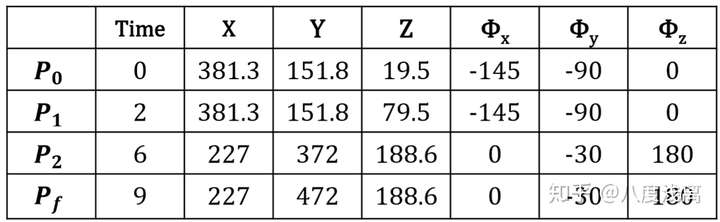
以linear function with parabolic blends在Cartesianspace下规划轨迹

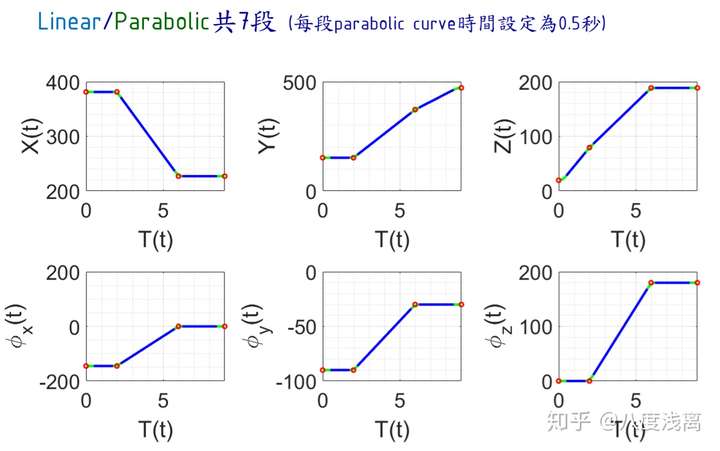
5. 建立并绘制出各DOF(X,Y,Z,Φx,Φy,Φz )在每个时间区段的轨迹。
注:从步骤1-5所有的计算均与具体的操作臂无关,即是在进行任务规划以及需求计算,并未落实到具体的操作臂。

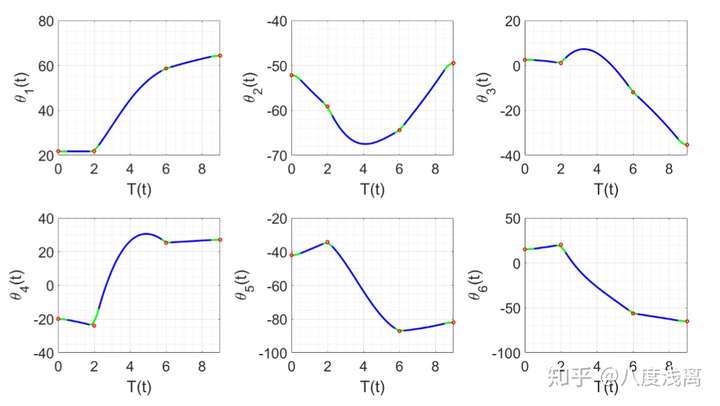
7.将解出的轨迹上所有设定点&以及轨迹内插点的6轴转角各自对时间画出轨迹圆。

9. 轨迹模拟。
以linear function with parabolic blends在joint-space下规划轨迹
4. 以IK计算各点的6轴转角。
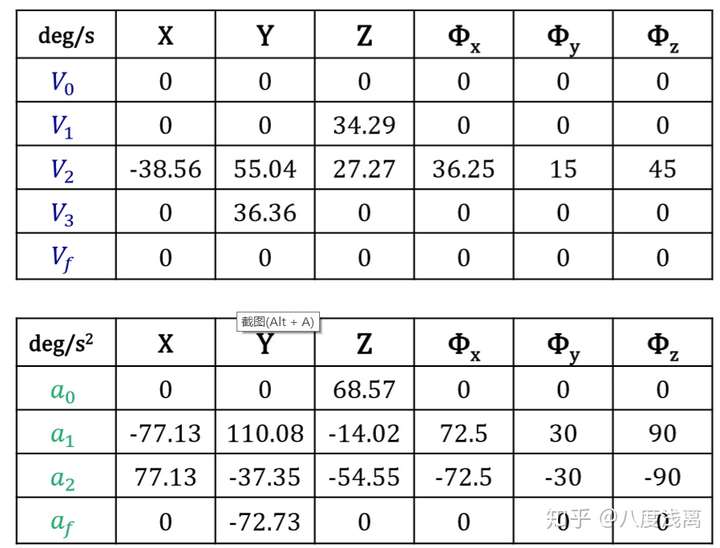
5.计算各轴(θ1- θ6)在每个时间段的速度和加速度。
6.建立各轴在每个时间段方程,画出轨迹。
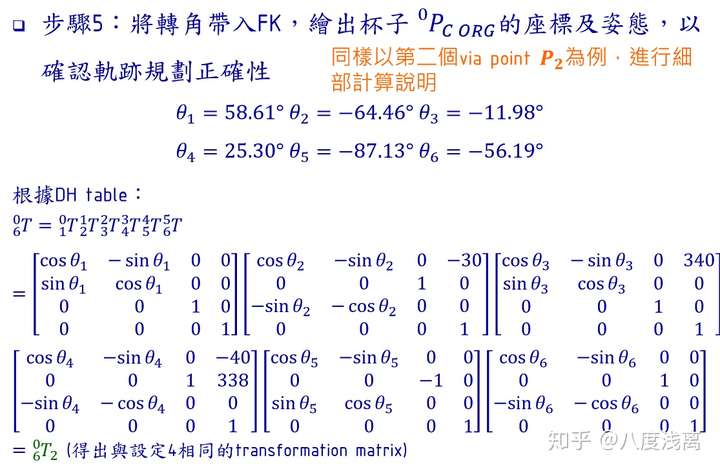
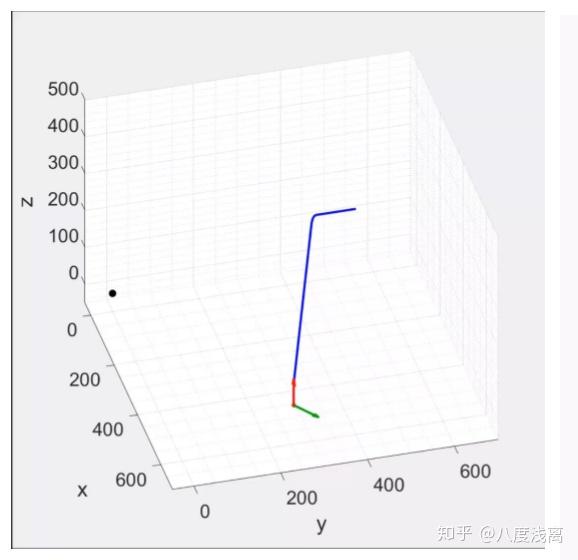
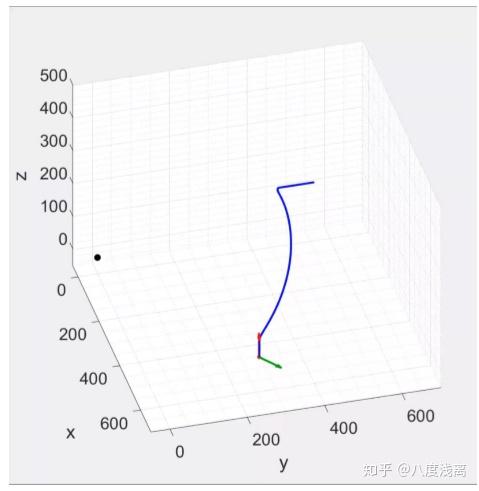
7.以FK绘出 对时间轨迹,确认轨迹通过设定点。
8.轨迹模拟。
两种方法的比较:
- 若非常在意在笛卡尔坐标系下的hg轨迹。比如,希望真实轨迹为直线,则最好在Cartesianspace下规划轨迹。
- 若对于在笛卡尔坐标系下的轨迹没那么强的要求,且我们希望在关节上面对电机的扭矩、速度有要求,那么我们在joint-space下规划轨迹。
- 若对实时性要求较高,则在joint-space下规划轨迹。因为在Cartesianspace下规划轨迹需要对轨迹上所有的点进行IK运算,而在joint-space下规划轨迹则只需对初始点、经过点和终点进行IK运算。


评论(0)
您还未登录,请登录后发表或查看评论