

台大机器人学之动力学——林沛群_哔哩哔哩 (゜-゜)つロ 干杯~-bilibili https://www.bilibili.com/video/BV1Vt41157jp?p=4
与讲课顺序略有不同,同于机器人学导论一书,感觉更顺畅。即从例题慢慢引出。
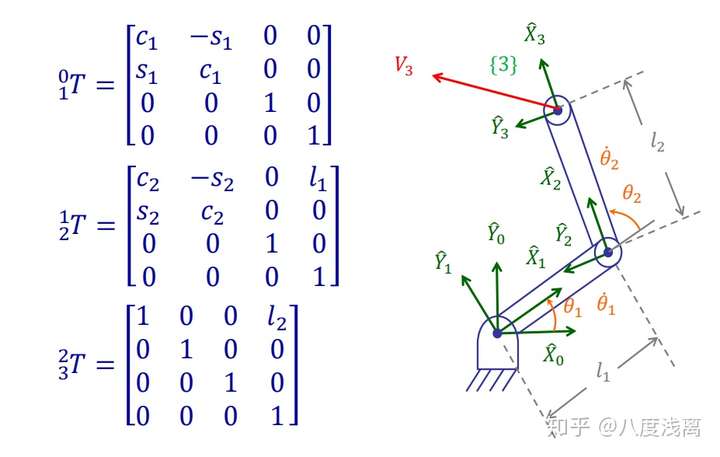
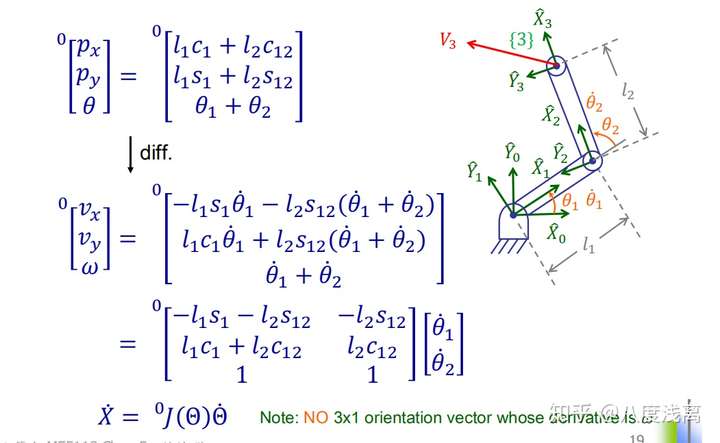
例子:两个转动关节的操作臂。计算出操作臂末端的速度,将它表达成关节速度的函数。两种解答形式,一是相对于坐标系{3},一是相对于坐标系{0}。
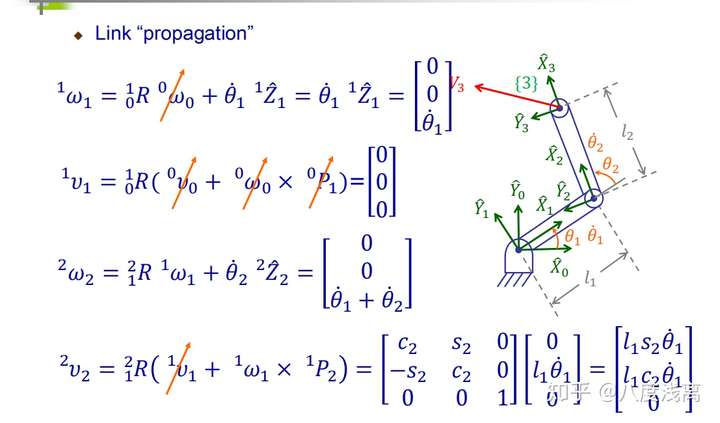
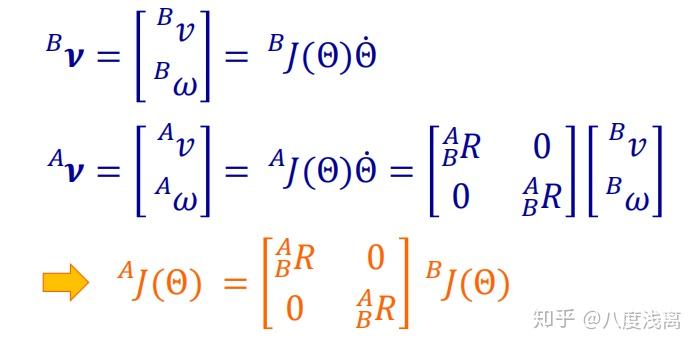
带入连杆传动的公式


得出
关于矩阵叉乘与向量相乘向量叉乘与叉乘矩阵 - neu博 - 博客园 https://www.cnblogs.com/monoSLAM/p/5349497.html
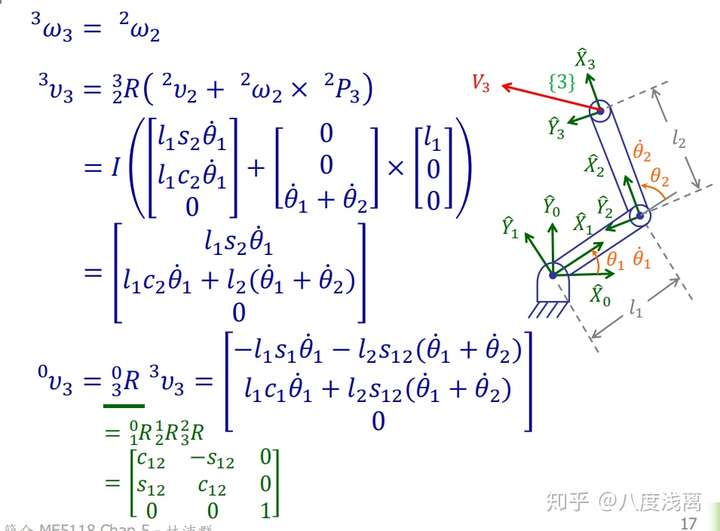
将矩阵中的变量拆出来分别有
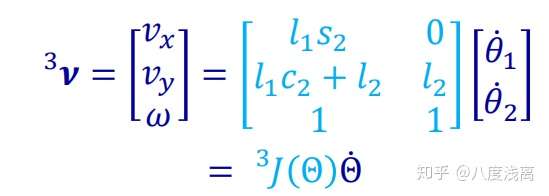
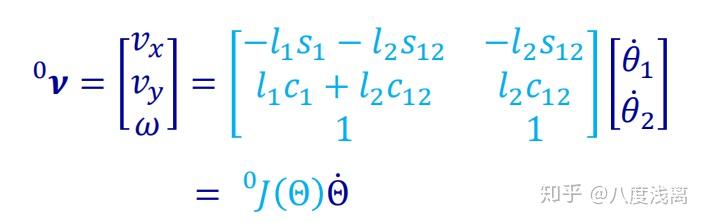
表达式中左上标表示笛卡尔速度所参考的坐标系。


即为我们所要求的雅可比矩阵。
雅可比矩阵时多维形式的导数(任何维数)。其行数等于操作臂在笛卡尔空间中的自由度数量,其列数等于操作臂的关节数量。
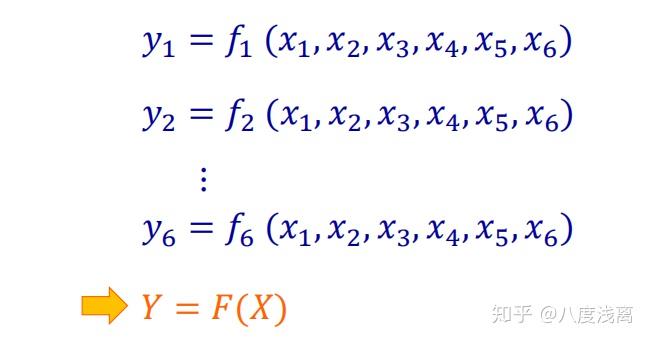
假设有6个函数,每个函数有6个独立的变量:
若要计算出 yi 的微分关于 xj 的微分的函数,根据多元函数求导法则,有
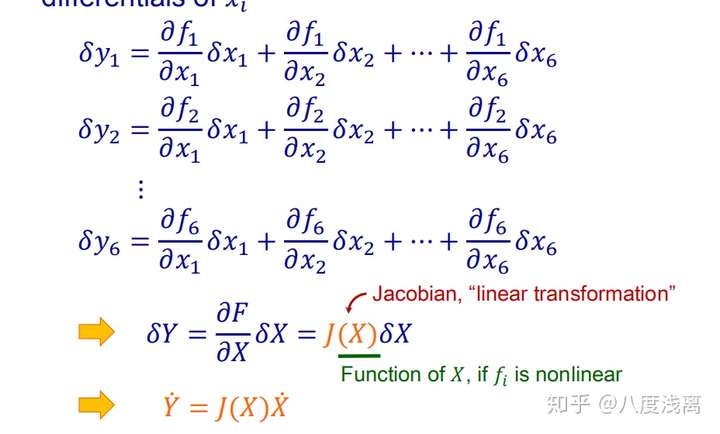
这个6*6的偏微分矩阵J(x)即为雅可比矩阵。

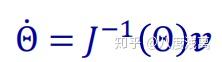
在机器人学中,通常使用雅可比矩阵将关节速度与操作臂末端的笛卡尔速度联系起来。故,有


现在我们将操作臂末端速度与关节角速度联系起来了,那么我们可以已知末端速度求需要多大的关节角速度吗?这就讨论到了雅可比矩阵的奇异性(可逆)问题。
大多数操作臂都有使得雅可比矩阵奇异的关节角矢量值,这些位置就称为机构的奇异位形简称奇异形。大致分为两类:
1)工作空间边界的奇异位形。出现于操作臂完全展开或收回使得末端执行器处于或非常接近工作空间边界的情况
2)工作空间内部的奇异变形。通常由两个或两个以上的关节轴线共线引起的。
当操作臂处于奇异形时,会失去一个或多个自由度。
检验上述例子的奇异性:
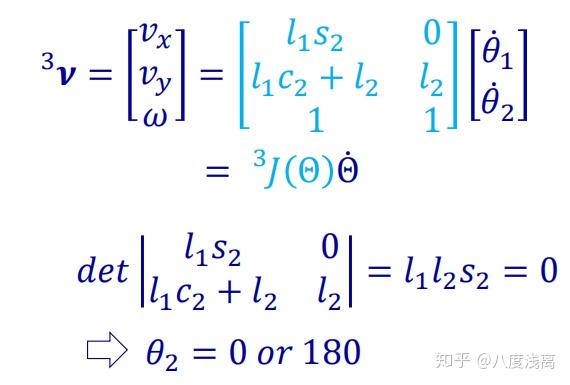
知道当关节角2为0或180度时,处于奇异形。
方法二:直接微分(用位置微分的速度,角度微分得角速度方式。)


评论(0)
您还未登录,请登录后发表或查看评论