

最近在搞超声波,把自己走过的一些坑,和经验分享一下,互相学习,让初学者少走一些弯路,K60代码网上找了一些,结果没有能用的,没办法,自己看讲解,用PIT计时测试成功,在K60和K66上测试可以使用,测距也比较准确,希望能有些帮助
1.HC-SR04超声波测距原理
准备 :引出4个排针,连接到单片机的vcc(5V),io口,io口,gnd,用到2个io口,
1.给脉冲触发引脚(Trig)输入一个持续时间>10us的高电平
2.输入方波后,模块会自动发射8个40KHz的声波,与此同时回波引脚(ECOH)端的电平会由0变为1; (输出一个高电平)(此时应该启动定时器计时)
3.当超声波返回被模块接收到时,接收端的电平会由1变为0(变为低电平);该高电平的持续时间即为超声波往返的时间,(这时停止定时器计数),
4.在单片机里面通过定时器计算Echo高电平的持续时间即可算出超声波往返的距离。
5.测距公式:距离=(高电平时间*声速)/2;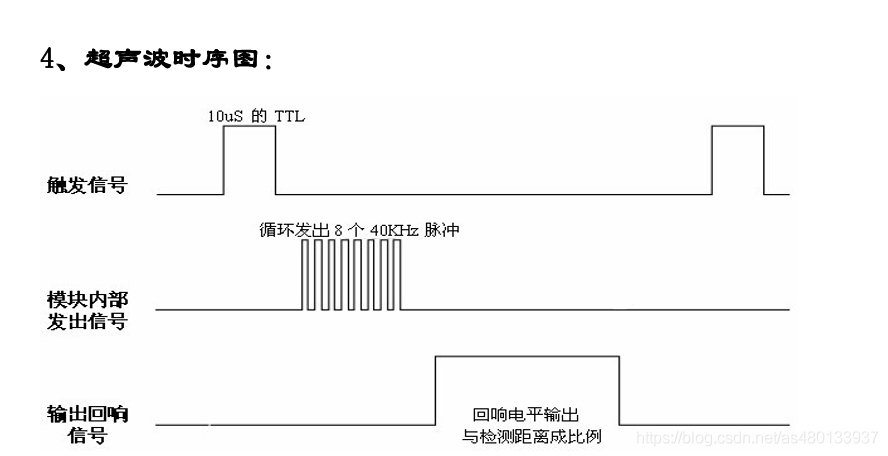
2.调试经验
1注意超声波要接的是5V,不是3.3V,使用下载器时一般都是3.3V供电,这就导致在线调试没有数据,应该给板子供上电,下载器不供电,超声波接到5V电源口,并且检测下是不是5V.
2.测距时不要距离太近,会导致数据不准确
3.超声波代码要尽量精简,不要繁琐,假设你代码过于繁琐,因为超声波测距时间非常短(us单位)可能这次电平已经发生变化,但是你的MCU在经行其他代码运行,可能就检测不到这次信号。
4.要考虑各种因素影响测距稳定,比如高电平检测是否准确,温度原因等,超声波测距的性能与被测物表面材料有很大关系,如毛料、布料对超声波 的反射率很小,会严重影响测量结果。
5.io口任意两个即可,注意不要占用到之前本来使用的,否则会出问题,还有PIT1如果使用,就初始化PIT2进行计时,一个PIT做一种工作
6 测量时间间隔在60MS左右最好
7 测距等待一定的时间,如果超时后依然没有数据返回,就放弃,而进行下一次测量。
超声波最大测距4米,反射路径8米,声速度331米/秒) 8/331=0.02416 //24MS
话不多说直接上代码⬇
#include "MK60_PIT.h"
#define TRIG D9 //超声波发送端
#define ECHG E12 //超声波接收端
int Distance = 0; //测量距离
gpio_init(TRIG,GPO,0); //初始化发送端
gpio_init(ECHG,GPI,0); //初始化接收端
/*
* @file distance
* @brief 超声波测距
* @author Z小旋
* @version v1.0
* @date 2019-1-17
*/
void distance(void)
{
uint32 Time = 0;
gpio_set(TRIG,1); //产生触发脉冲
pit_delay_us(pit1,20);
gpio_set(TRIG,0); //产生一个20us的高电平脉冲
while(gpio_get (ECHG) == 0); //等待电平变高,低电平一直等待
pit_time_start (pit1); //开始计时
while(gpio_get(ECHG) == 1) //等待电平变低,高电平一直等待
{
Time++;
systick_delay(1);
if(Time>240000) break; //24MS还没有检测到
};
timevar = pit_time_get(pit1); //停止计时,获取计时时间
//timevar = timevar * 340 /2/10;
Distance = timevar*(331.4+0.607*10)/2000; //加上温度补偿
// DELAY_MS(60); //延时60MS,测距更精确,可以不用,2.27号:有反映说加上之后测距不精确,注释之后就好了,自行测试
}
上面代码测距误差在10mm以内,满足正常使用,直接调用函数即可
下面这个是使用外部触发中断进行的,附上完整代码,直接复制使用即可,如果没有对应的库,完整例程在下方下载,弄到百度云了,CSDN下载还要钱。。。
#include "headfile.h"
#define TRIG A14 //定义超声波触发引脚端口
#define ECHO A13 //定义超声波回响引脚端口
/*
* @brief 超声波测距
* @author Z小旋
* @version v1.0
*/
uint8 flag_mode = 0;//当前运行状态 0:采集结束 1:正在采集
uint32 dis_time;//定义时间变量 单位微秒
uint32 distance;//定义距离变量 单位毫米
int main(void)
{
gpio_init (TRIG,GPO,0); //触发引脚初始化 新生板A28
port_init (ECHO, IRQ_FALLING | PF | ALT1 | PULLUP ); //接收引脚初始化 新生板E9
//port_init (ECHO_PIN, IRQ_RISING | PF | ALT1 | PULLUP );
set_irq_priority(PORTA_IRQn,3);//设置优先级 越低优先级越高
enable_irq(PORTA_IRQn);//开中断 PIN_INT0_IRQn - PIN_INT7_IRQn
EnableInterrupts;
//这里是while循环,使用时请封装成函数并在中断中调用,不宜调用过快,否则会很占系统时序
while(1)
{
if(!flag_mode)
{
flag_mode = 1;
gpio_set(TRIG, 1);
pit_delay_us(pit1,15);
gpio_set(TRIG, 0);
while(!gpio_get(ECHO)); //检测到接收引脚为高电平则开始计时
pit_time_start (pit1); //开始计时
dis_time = 0; //时间清零
}
//超时检测
if(20000 <= pit_time_get(pit1)) //如果等待20ms之后还未接收到回响信号则 认为前方无障碍物
{
dis_time = 0; //时间清零
distance = 1000;
flag_mode = 0; //采集结束
}
}
}
//-------------------------------------------------------------------------------------------------------------------
// @brief PROTA中断执行函数
// @return void
// @since v1.0
// Sample usage: 当A口启用中断功能且发生中断的时候会自动执行该函数
//-------------------------------------------------------------------------------------------------------------------
void PORTA_IRQHandler(void)
{
//清除中断标志第一种方法直接操作寄存器,每一位对应一个引脚
PORTA_FLAG_CLR(A13);
if(flag_mode)
{
dis_time = pit_time_get(pit1); //获取时间
distance = (int16)(dis_time*(331.4+0.607*10)/20000); //加上温度补偿
flag_mode = 0;
}
}
链接: https://pan.baidu.com/s/1YP8SuujxxRzOxO2cm_KWIQ 提取码: btyv
整理不易,都看到这儿了,点个赞再走呗



评论(0)
您还未登录,请登录后发表或查看评论