

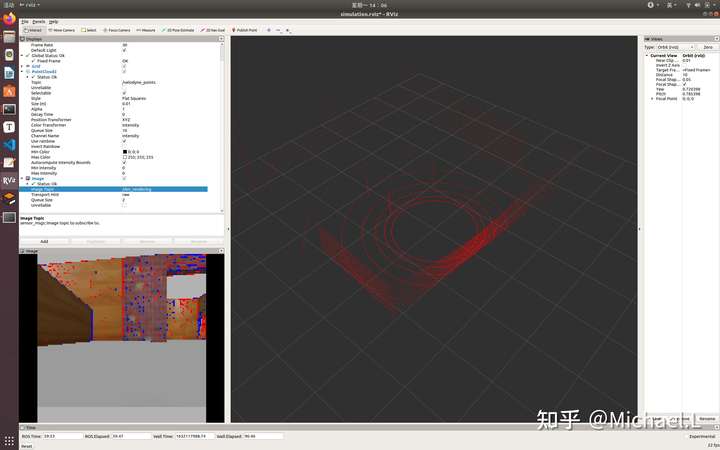
为了在实验前进行初步的算法开发,笔者简单搭建了一个携带多传感器机器人的gazebo仿真环境。该环境是在turtlebot3模型的基础上,增加了 event camera DVS 128 和 Velodyne VLP-16。这里给出了github的链接,使用方法已经在里面详细介绍了。
GitHub - MichaelLu-hku/simulation: gazebo simulation environmnent of multi-sensor robot.
效果如下:
以后如果需要还会添加更多传感器,比如realsense系列的深度相机,livox系列lidar等等,未来也会把传感器移植到无人机的仿真平台上,请持续关注 。




评论(0)
您还未登录,请登录后发表或查看评论