

牵引示教,其本质是一种柔顺控制,也即让机器人在用户面前,表现得跟温顺地绵羊,用户可以轻松随意指挥他运动。
那首先需要做的是,要让我们的绵羊(机器人)感知到我们向其施加的力;这里的感知就是通过传感器获得的。这里我们比较电流环与力矩传感器在感知外力上的区别。
1. 理论解释
下图是一个简化的机器人关节模型,其中的弹簧相当于力矩传感器。初始时关节处于静止状态。
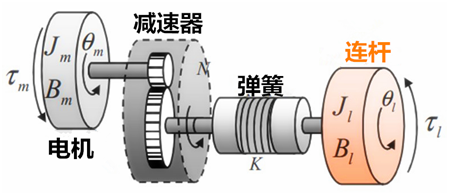
现在在连杆中施加外力矩
- 力矩传感器感知
该力矩引起连杆运动,此运动可以很快地传递到弹簧(力矩传感器)处。
- 电流环感知
该力矩通过弹簧后继续往后传递,它来到了减速器端,并尝试推动减速器反向转动;但它发现,由于减速器静摩擦力的作用,这个减速器推了半天也不动;于是继续增大外力矩,当大到超过了减速器的最大静摩擦力时,减速器终于转动起来,这个转动在往后传,电机转子也跟着运动起来;这时候,电流环才感知到了外力矩。
2. 实验验证
接下来,我们通过一个小实验来验证上面的分析。我们让电机三个环(位置,速度,电流环)全开,并上伺服,此时电机会被控制器强制静止。
这个时候,我们在连杆端慢慢增加推力,来看力矩传感器和电流环信号的变化,如下图
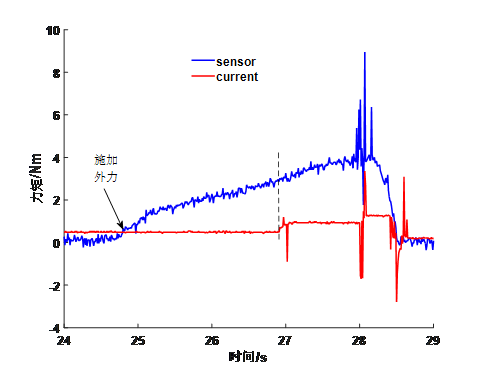
外力在t=25s左右开始施加,并慢慢增大,此时力矩传感器信号立即发生变化(蓝线);但电流环(红线)并没有变化,如上面分析,这个时候外力太小,运动没有传递到电机转子,电机没感知到外力;
随着外力逐渐增大,t=27s左右,运动传递到电机转子,电机感受到外力,电机转子试图运动,控制器为了抑制转子运动,开始调整电流(即输出力矩),我们可以看到,电流环发生了变化。
3. 总结
- 由于减速器静摩擦力,需要较大的外力,才能使电流环检测到。
- 静摩擦力状态未知(静摩擦力是由外力决定的),我们无法知道这个“较大的外力”到底是多大。
- 力矩传感器在检测外力上优势明显。




评论(0)
您还未登录,请登录后发表或查看评论