

前言
ICP全称 Iterative Closest Point ,翻译过来就是迭代最近点.ICP在点云配准领域应用的非常广泛,因此基于深度相机\激光雷达的算法使用ICP的频率比较高.
ICP的目的是用来求解两个点云集合转换关系,也是目前的最通用的方法。
最基本的ICP是通过对应点去求解点云的对应关系,后期演变出点线ICP\点面ICP等等众多的方法.
本篇博客主要来探究下ICP家族的师祖,点点ICP的数学模型,及推导.最后用代码证明.
ICP数学模型
给定两个点云集合: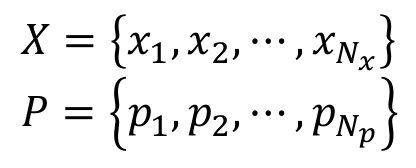
xi和pi表示点云的坐标;
Nx和Np表示点云的数量.
ICP的核心思想是:
求解旋转矩阵R和平移向量t,使得下式最小: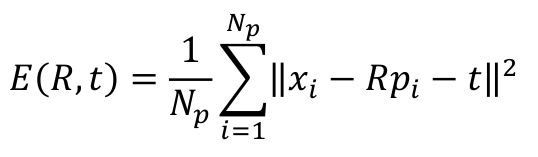
ICP求解方法
在已知对应点的情况下.就是说上面的x1和p1对应,x2和p2对应…..
进行两个点云的去中心化
求x点云的几何中心坐标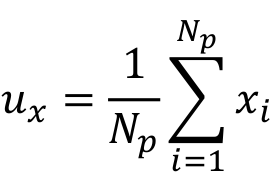
求p点云的几何中心坐标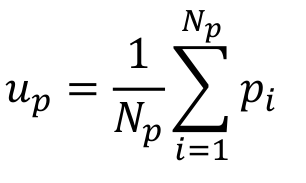
两个点云分别每个点减去各自的点云几何中心坐标,形成新的点云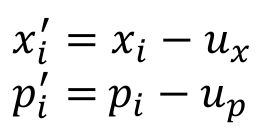
求W矩阵并进行SVD分解
将上面的新形成的两个点云相乘(其中一个先转置)得到的矩阵为W矩阵
然后对W矩阵进行SVD分解,得到U和V矩阵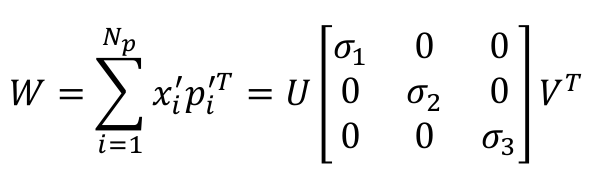
计算R和t
通过U和V即可计算出R
然后通过两个点云的中心坐标及R可算出t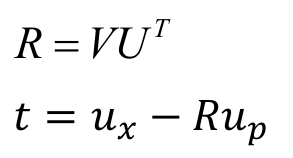
求解方法公式推导
从上面说的核心公式开始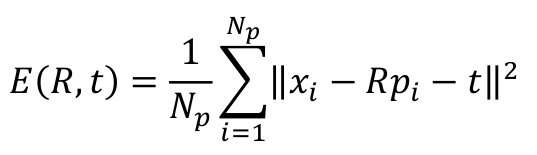
引入点云的几何中心ux和up,由于核心公式里pi前乘了R,所以up前也乘R才好合并.下式红色部分为0
把中心点移到前面,剩下的和t组成最后括号里的
将平方开出来,形成,下面的式子
这个式子中红色框是为0的.蓝色框是需要继续向下求的
第一个蓝框仅与R有关
第二个蓝框中,对于任意R,总能得到t = ux − Rup ,使它等于0
那么原核心公式可以转换为:
将去中心化的点云表达式引入: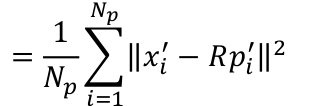
开平方得到下式
中间项的RTR就是E了,也就没R了,将有R的提出了,无R的向后放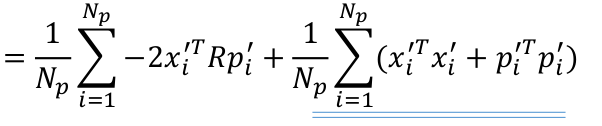
上式中画横线的是一个固定值,与R无关,所以就成了求第一项的最小值
也就是
的最大值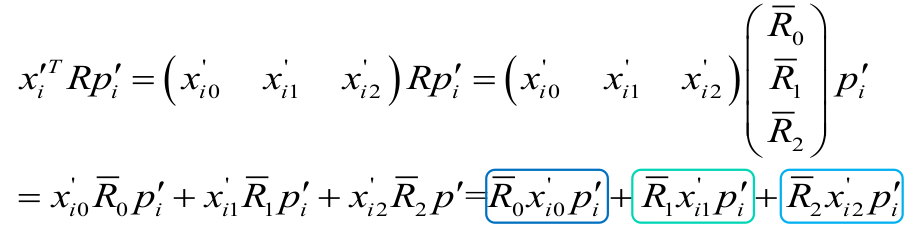
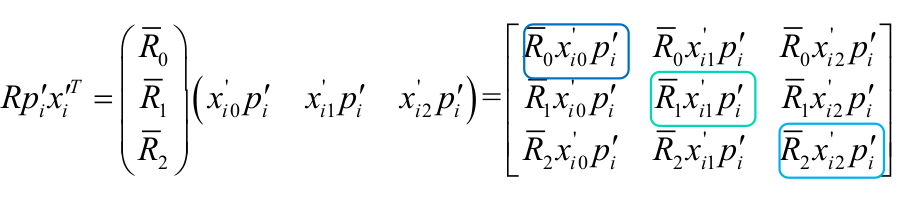
注意第一个式子和第二个的对角线元素对应一致,所以
到现在核心公式转为了求下面的式子
对H进行SVD分解,即
令

XH为正定对称矩阵.所以
当R=X时,RH的值最大.所以R的解为
代码证明
Code
int main (int argc, char** argv)
{
/*自己构建点云*/
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_in (new pcl::PointCloud<pcl::PointXYZ>);//声明源点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_out (new pcl::PointCloud<pcl::PointXYZ>);//声明目标点云
/*自己构建的点云 */
/*填充源点云*/
cloud_in->width = 100;
cloud_in->height = 1;
cloud_in->is_dense = false;
cloud_in->points.resize (cloud_in->width * cloud_in->height);
for (size_t i = 0; i < cloud_in->points.size (); ++i)
{
cloud_in->points[i].x = 1024 * rand () / (RAND_MAX + 1.0f);
cloud_in->points[i].y = 1024 * rand () / (RAND_MAX + 1.0f);
//cloud_in->points[i].z = 1024 * rand () / (RAND_MAX + 1.0f);
//先测试二维数据
cloud_in->points[i].z = 1;
}
首先构建一个原点云.里面设置100个点,然后随机取值
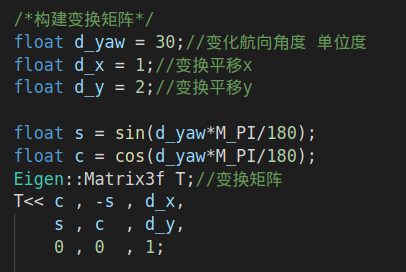
/*构建变换矩阵*/
float d_yaw = 30;//变化航向角度 单位度
float d_x = 1;//变换平移x
float d_y = 2;//变换平移y
float s = sin(d_yaw*M_PI/180);
float c = cos(d_yaw*M_PI/180);
Eigen::Matrix3f T;//变换矩阵
T<< c , -s , d_x,
s , c , d_y,
0 , 0 , 1;
构建变换矩阵
//将源点云赋值给目标点云
*cloud_out = *cloud_in;
/*将源点云经过变换矩阵,获得目标点云*/
for (size_t i = 0; i < cloud_in->points.size (); ++i)
{
Eigen::Vector3f point_in,point_out;
point_in << cloud_in->points[i].x,cloud_in->points[i].y,cloud_in->points[i].z;
point_out= T * point_in;
cloud_out->points[i].x = point_out[0];
cloud_out->points[i].y = point_out[1];
cloud_out->points[i].z = point_out[2];
}
将原点云经过变换矩阵得到目标点云
/*求两个点云的几何中心*/
int num_points = cloud_in->points.size ();
Eigen::Vector3f sum_point_in = Eigen::Vector3f::Zero();
Eigen::Vector3f sum_point_out = Eigen::Vector3f::Zero();
for(size_t i=0;i<num_points;++i)
{
sum_point_in[0] = sum_point_in[0] + cloud_in->points[i].x ;
sum_point_in[1] = sum_point_in[1] + cloud_in->points[i].y ;
sum_point_in[2] = sum_point_in[2] + cloud_in->points[i].z ;
sum_point_out[0] = sum_point_out[0] + cloud_out->points[i].x ;
sum_point_out[1] = sum_point_out[1] + cloud_out->points[i].y ;
sum_point_out[2] = sum_point_out[2] + cloud_out->points[i].z ;
}
Eigen::Vector3f u_point_in,u_point_out;
//源点云几何中心
u_point_in[0] = sum_point_in[0]/num_points;
u_point_in[1] = sum_point_in[1]/num_points;
u_point_in[2] = sum_point_in[2]/num_points;
//目标点云几何中心
u_point_out[0] = sum_point_out[0]/num_points;
u_point_out[1] = sum_point_out[1]/num_points;
u_point_out[2] = sum_point_out[2]/num_points;
/*点云去中心化*/
for(size_t i=0;i<num_points;++i)
{
//源点云去中心化
cloud_in->points[i].x = cloud_in->points[i].x - u_point_in[0] ;
cloud_in->points[i].y = cloud_in->points[i].y - u_point_in[1] ;
cloud_in->points[i].z = cloud_in->points[i].z - u_point_in[2] ;
//cloud_in->points[i].z = 1 ;
//目标点云去中心化
cloud_out->points[i].x = cloud_out->points[i].x - u_point_out[0] ;
cloud_out->points[i].y = cloud_out->points[i].y - u_point_out[1] ;
cloud_out->points[i].z = cloud_out->points[i].z - u_point_out[2] ;
//cloud_out->points[i].z = 1 ;
}
求两个点云的几何中心,然后去中心化
/*求W矩阵*/
Eigen::Matrix3f W =Eigen::Matrix3f::Zero();//声明W矩阵
for(size_t i=0;i<num_points;++i)
{
Eigen::Vector3f point_in,point_out;
point_in << cloud_in->points[i].x,cloud_in->points[i].y,cloud_in->points[i].z;
point_out << cloud_out->points[i].x,cloud_out->points[i].y,cloud_out->points[i].z;
W = W + point_out*point_in.transpose();//累加求和
}
求W矩阵
//对W矩阵进行SVD分解
Eigen::JacobiSVD<Eigen::MatrixXf> svd(W, Eigen::ComputeThinU | Eigen::ComputeThinV );
//求V和U
Eigen::Matrix3f V = svd.matrixV(), U = svd.matrixU();
将W矩阵进行SVD分解,然后得到U和V
/*求R和t*/
Eigen::Matrix3f R = U*V.transpose();//这里公式和课件里不一致
Eigen::Vector3f t = u_point_out - R*u_point_in;
std::cout << "R" << std::endl<< R << std::endl;
std::cout << "t" << std::endl << t << std::endl;
求R和t
Result
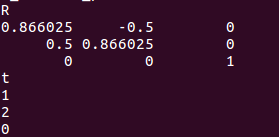
求解的结果和代码里构建的变换矩阵是一致的



评论(0)
您还未登录,请登录后发表或查看评论