

机械臂的力控制在机器人打磨、装配等领域愈来愈成为刚需。对于力控制的分类方法有多种多样。这里从整体实现方案上来讨论两种力控方案:整臂力控与末端力控。
1. 整臂力控
在机械臂末端安装力传感器,控制器通过力传感器检测机械臂与外界环境的接触力,并改变各个关节的出力与位置,来达到调整机械臂与末端环境接触力的目的。
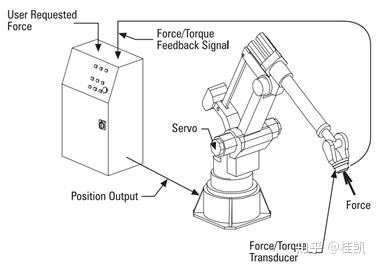
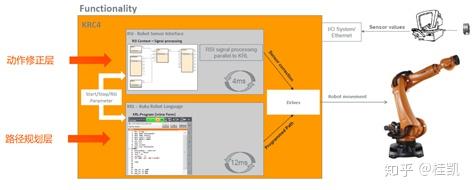
整体控制思路很自然,与人的行为模式也很一致,且可以很好地进行六自由度的力控制。而在接触刚度过大的时候,由于机械臂的惯性与电机的有限力矩,导致力控的动态响应和稳定性较差。目前四大家族的机器人均自带力控工艺包,也是通过全臂的方式实现的。下图是ABB机器人力控打磨时的压力控制精度,以及Kuka的力控制方案框图。
2. 末端力控
在机械臂末端安转一个独立的力控制单元,在机器人工作过程中,机器人自身的六轴按传统的位置控制进行运动,力控制通过末端的力控单元来实现。这样将位置控制与力控制分离开了。而且,单独的力控单位惯量小,加速度大,力控的动态特性与稳定性更易于保证。然而,这种方式下的力控单元一般只能控制一个方向的力。这种力控单位价格昂贵,高达几十万,比单纯的力传感器要贵很多。
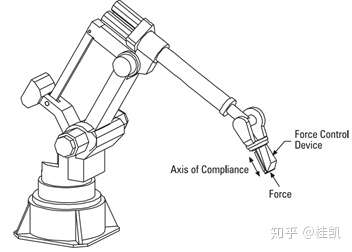
这种方式的典型产品有PushCorp和FerRobotics,它们可适配各家的机械臂,并独立于机器人控制器来工作。

3. 对比实验
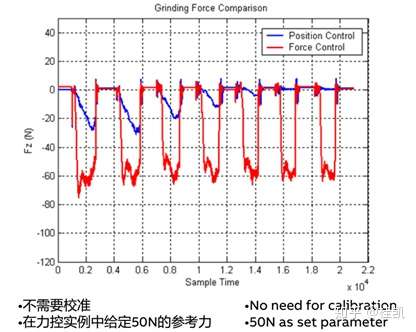
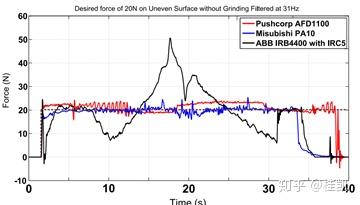
实验中只给出如下曲面的起点位置和终点位置,设定Y方向的力控压力为20N,X方向走位置控制。

几种力控制方案的效果如下图所示。可以看出ABB这种整机力控的性能比较差,这是由于整机力控的响应较慢导致的,但如果示教出这条曲线的更多中间点信息,ABB的力控制精度是可以提高很多的。



评论(0)
您还未登录,请登录后发表或查看评论