

上一章传送门:
上节讲了绕线转子异步电机,是一种转子上和定子上有对称绕组布置的异步电机。但是这还不是最简单的布置方式,这样转子还要绕线。事实上,异步电机是可以不需要绕线的,可以单纯通过耦合磁链对转子上的感应电流的作用来推动转子——也就是鼠笼电机的思想。
鼠笼电机的转子造型往往像一个宠物松鼠的旋转笼子,故名鼠笼电机。而因为鼠笼电机制造相对简单经济,对外界扰动不敏感,易于维护,可超载,也是世界上工业领域分布和应用最广泛的电机。相比之下,绕线转子电机就显得结构复杂,更昂贵,对扰动很敏感。
一个鼠笼转子由冲压铁片多层包装,为了降低涡流,也像一般叠片铁芯做了绝缘处理,在叠片铁芯(Blechpaket)的槽中,有不加绝缘的导体棒(Rotorstäbe),导体棒在转子两端盖子上通过短路环(Kurzschlußring)首尾连接构成了一个“笼子”。本质上,这个由导体棒构成的所谓的“笼子”,就等价形成了绕线转子电机中的绕组。

在小型电机里鼠笼也会经常用铸铝制造
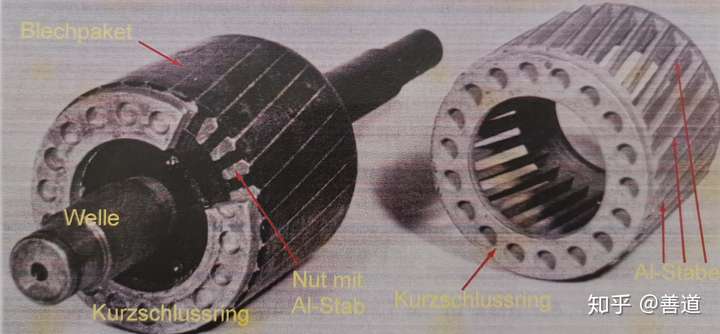
而在大型电机则会在转子槽中插入裸露的铜棒,并且相连的短路环也是铜制的。

1. 结构和主要工作原理
铜或者铝的导电性比铁好太多,所以一阶近似后,转子电流只在导体棒上流动,尽管导体棒并未绝缘。这些导体棒就是逻辑上的鼠笼电机的多相“绕组”,线圈束数 导体棒数。此外,转子表面槽的导体棒还要通过剩下的“返回导体”形成封闭导通回路,“返回导体”是可经由转子内部叠片到内部,最终绕回来的部分。这样就有了一个对称的多相绕组系统,其中共有
捆闭合线圈束。每捆线圈束都是单独的导体棒加剩下的回路组成,所以等效绕组数为
。
因为对称性,所有定子正弦式电流旋转场的总和感应出的转子电流为零。那么实际上可以省去“返回导体”,只要当所有的导体棒都经由一个节点相接。这也就是一种 个角的星形连接,可以用另一种等效的导体回路替代。

1.1 等效导体棒回路的稳态工作磁链
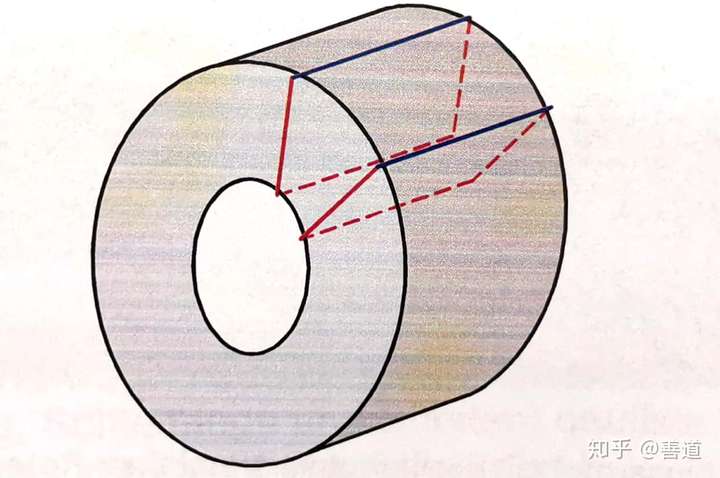
对于稳态工作状态的电压方程,可以类比绕线转子电机的推导过程。现在我们继续只讨论基波的情况。最简单的情况下,由于导体棒是在转子圆周对称布置的,槽数为导体棒数且为偶数。所以现在可以看到这个鼠笼的基本元素就是一个转子网格,这个转子网格由两根导体棒以及两段短路环的端扇形切片构成。所以这段扇形切片占的弧长为
(13.1)

为了使计算简化,可以假设,定子坐标系统原点选在U相的定子线圈束中间,而转子坐标原点选在任选的一个转子网格1(Masche 1)中间。在 时,两个原点正好重合。

编号为 (U,V,W)的定子线圈束上,会分别流过电流
(13.2)
定子旋转磁场在定子坐标系产生的磁场基波为
(13.3)
(13.4)
转子机械角速度 和角度
为
(13.5)
(13.6)
一个点在定子和转子坐标系就有关系如下
(13.7)
代入基波表达式(13.1)可以得到定子旋转场在转子坐标系中的变换
(13.8)
在之前的绕线转子电机,是在转子的对称绕组上激发的感应电压。而在鼠笼电机的转子上,感应电压只会在笼子形状的导体棒和短路环上激发。为了算出转子电流,我们最好是通过每个转子网格的电流变化,来确定总磁链。把环形转子网格展开,可以看到每个槽宽 内都是一个回路。

那么第 个转子网格上的定子激发的磁链应为
(13.9)
类比定子绕组因数,可以引入转子的绕组因数 ,并代入
化简,
(13.10) 所以能够化简磁链表达
(13.11)
其中定子旋转磁场在转子上的耦合互感
(13.12)
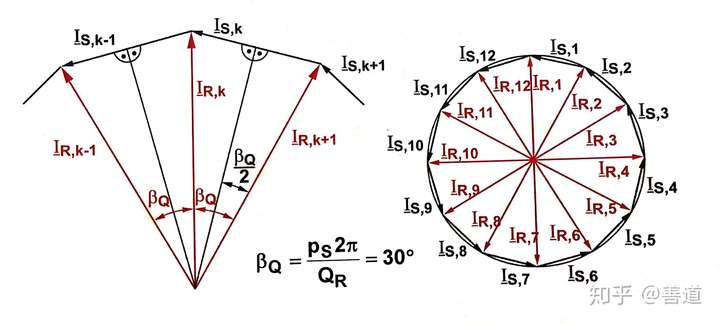
由于结构对称,显然,单对极的鼠笼电机,每个转子网格之间会有一次电角度 偏移,而如果是
对极,那么每个转子网格之间的磁链会正好隔一个相角
(13.13)
1.2 导体棒和短路环的电流
考虑到电流强度与时间有关,所以每一个转子网格内的导体棒电流 以及短路环电流
分别是
(13.14)
(13.15)

因为整个转子上所有感应出来的稳态电流都是一样频率的,所以可以引入复数表示法,即相量表示法。只考虑多根棒以及环切片之间恒定的相位差,那么有
(13.16)
(13.17)
再考虑导体棒和短路环相接处的节点,使用节点定理,有
(13.18)
(13.19)
由于棒电流标称值 和环电流标称值
的相角差了
,而幅值上则为
(13.20)
所以短路环上跑的电流要比导体棒上跑的电流多很多。短路环必须相对应地设计成更大尺寸。
1.3 鼠笼电机电压方程

为了求出转子电压方程,可以使用法拉第感应定律来考察整个转子网格 的电路。其中
为构成转子网格的短路环的电阻和槽间漏磁自感,
为构成网格的导体棒的电阻和槽间漏磁自感。对于第
个转子网格一周路径的电场积分
(13.21)
(13.22)
可以先用短路环电流表示所有转子上的电流,当然也可以用导体棒电流来表示,不过这样后面计算的所有数值都会有所不一样。由图13.10可知,相量 之间满足以下几何关系
(13.23)
代回原式 ,可以得到
(13.1)
其中 为一个网格短路环的几何结构上的总等效电阻。
而第 个转子网格处出现的磁链
,理论上它会由定子基波以及转子基波激发的气隙磁链;几何构造上从槽和端侧壁(Stirnraum)出来的转子漏磁(不会穿过电机气隙);高次谐波或者双链漏磁,这部分虽然会通过气隙,但是实际上并不对定子产生影响。从已知的导体棒漏磁自感
短路环漏磁自感
可以算出转子电流产生的几何漏磁
(13.1)
类比几何等效电阻,在一个转子网格的短路环上等效的几何漏磁自感为
(13.1)
这样计算一个转子网格上的磁链,就可以只从转子两端的短路环出发来算,使用安培环路定理
(13.1)
整个环路由短路环端外部 ,通过所有电机金属铁部分
以及气隙
构成。由于金属铁芯部分磁导率很大(
),贡献的磁场强度
较小,可以忽略抑或几何等效为气隙宽度
表示,而在短路环外端磁压压降会最终衰减为零,所以气隙磁场直接受短路环电流决定
(13.1)

因为在两根导体棒之间的短路环电流不能变化,所以由转子激发的磁场在一个转子网格区域内实质上是均匀的,且可以基本视为全在气隙。第 个转子网格磁链为
(13.1)
转子网格等效气隙自感为 。注意:这样算出来的气隙网格磁链包含了转子旋转磁动势所有基波高次谐波,而这些旋转场全部是由在转子网格上的转差频率激发的。
当只考察转子基波的作用,会有转子主磁链
(13.1)
剩下的高次谐波产生的转子磁链在前面被命名为“双链转子漏磁”(doppeltverkettete Rotorstreuung) ,它虽然穿越气隙,但却不在定子上产生有效电压。因为它如同纯转子漏磁,可被算入几何漏磁自感
(13.1)
所以最后产生在第 个转子网格的总磁链
为
(13.1)
所有几何漏磁和双链转子漏磁都视为转子漏磁
(13.1)
现在确定了所有磁链,所以最后可用电磁感应定律
(13.1)
所以全部移到一边得到
(13.1)
在稳态工作时,可改用相量表示计算
(13.1)
这样就能得到鼠笼转子的电压方程
(13.1)
类比旋转场定子在转子上的互感,可以得到转子在定子上的互感,而鼠笼电机的定子电压方程和在之前转子绕组不供电的绕线转子电机里的定子方程是一样的
(13.1)
(13.1)
所以,其实鼠笼电机和绕线转子电机的电压方程是同样的模型,之前绕线转子电机中对转矩,功率,电流极限圆的论述对鼠笼电机在理论上也是一并成立的!
13.2 鼠笼转子的集肤效应
一个简单的鼠笼转子会使用截面是圆形的导体棒,而对于一个大型电机,在电流极限圆上,它的短路点 会非常接近理想短路点
,这就导致,即便有一个很大的启动电流,仍然只会有一个很小的启动转矩,也就是说鼠笼电机直接启动是非常不经济的。
对于绕线转子电动机而言,可以通过切换转子附加串联电阻来限制启动电流以及保持满转矩启动。但是这样也会带来更多损耗。而在鼠笼电机上,可以采取一种专门的方法来实现相同的效果,也就是利用集肤效应(Stromverdrängung),它会随转速提高而增强。
2.1 集肤效应
考查一个导体棒(深槽式导体棒)的截面,通入直流电后,电流会在转子导体棒上均匀分布,即电流密度 恒定。导体棒电流会激发一个槽上的漏磁场,如果假设铁芯磁导率
,利用环路定理,可知槽上磁通密度
是从槽底到槽顶线性增加。

然而在转子里会流过交流电时,就会在导体棒长端感应出变化的漏磁场,变化的漏磁场又带来感应电压,导致导体棒顶端的电压会比底端的高,这样形成的涡流和原有转子感应电流加在一起导致电流分布不再均匀,在导体棒顶端的电流密度会比在底端高。

而涡流大小又和感应电流频率成正比,所以当通过深槽导体棒上的转差频率 不断提高时,顶端和底端电流相差越来越悬殊,就如同电流就会不断被挤到导体棒顶端,这就导致有效的导体棒高度不断减少,因此转子电阻增大。
交流电阻 和原来导体棒电阻
之间可以用以下关系表示
(13.1)
电阻因数 取决于导体棒的电导性,导体棒和槽的几何形状以及转差频率。也就是说导体棒及槽截面可以使用一些特殊几何形状来增强集肤效应,但是在设计计算转子电阻时需要注意,短路环以及不在铁芯里的导体棒几乎没有集肤效应。
无论如何,由于涡流产生的集肤效应会不可避免地带来很大的热损耗,大大降低电机的工作效率。所以在大型电机不会利用集肤效应而是努力避免集肤效应。这里集肤效应只是用来改善鼠笼电机的启动历程:在启动之初,转差频率很大,也就是整个转子的等效电阻很大,当最后进入额定工作转速时,转差频率就比启动时小了很多,那么转子上的总电阻也跟着小了很多,如同进行了附加串联电阻的切换。
集肤效应也会导致漏磁自感和转差频率有关,导致漏磁场不再均质,也会使得感抗相应减小。由于集肤效应,转子的有效电阻变大,而感抗却减小了,所以电流极限圆上的短路点 也会越来愈向转折点移动,同时静止状态的电流极限圆的半径也随之增大。所以启动点A的极限圆会随着转子进入工作状态B,不断向左缩小移动。

13.2.2 其他类型的导体棒
如果更多考虑导体棒,本身的形状,那么在底端做大的导体棒会比等宽的深槽导体棒有更强的集肤效应,比如楔形和L型。但这样加工制造费用也会随之上升。
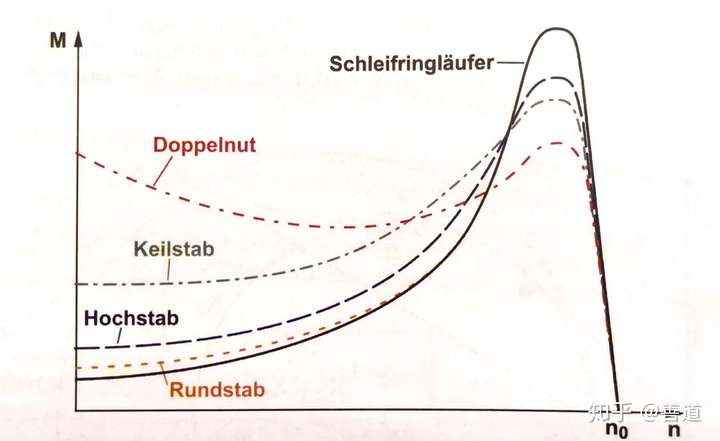
除了使用一槽一棒的配置,还可以有双槽乃至多槽的鼠笼转子。比如一个槽内直接布置两根导体棒,槽底的用来正常工作而槽顶的用来启动,为此两根导体棒的材质和尺寸也各不相同。槽顶的启动导体棒往往采用黄铜等铜合金;而槽底的工作导体棒就会用纯铜或铝,这样在启动时转子有更大电阻更小感抗,工作时更小电阻更大感抗。

不同类型导体棒的鼠笼转子的启动性能各不相同,相比与绕线转子(Schleifringläufer),在最大转矩区都要不及。下面有几种类型导体棒的机械特性曲线比较,双槽型(Doppelnut),楔形槽型(Keilstab),深槽型(Hochstab),圆槽型(Rundstab)。
13.3 小结
本章探讨了鼠笼异步电机,经过等效转化以后,鼠笼电机的定子构造以及电压方程都如同绕线转子电动机,而转子经过等效转化后,其描述的电压方程如同转子电路不供电的绕线转子电动机,相应的转矩,功率以及机械特性都可以类似描述。所以它的经济性让它在工业应用上有更多广泛的应用。说了常见的异步电机,下一章要探讨同步电机的工作原理。




评论(0)
您还未登录,请登录后发表或查看评论