

感谢前辈的分析
- Chenglin Li:自抗扰控制理论(七)自抗扰设计流程
- 自抗扰控制器中扩张状态观测器的设计_人工智能_song430的博客-CSDN博客
- 自抗扰控制中的扩张状态观测器收敛性分析3_人工智能_xiaofei473的博客-CSDN博客
- 故障诊断4-龙伯格状态观测器设计_matlab_jinpeng_cumt的博客-CSDN博客
- 利用状态观测器估计加性扰动_matlab_XSTX1996的博客-CSDN博客
- 自抗扰控制中的扩张状态观测器收敛性分析1_xiaofei473的博客-CSDN博客
- 自抗扰控制中的扩张状态观测器收敛性分析2_自抗扰控制,ADRC,扩张状态观测器_xiaofei473的博客-CSDN博客
- 自抗扰控制(ADRC)-- 扩展状态观测器
- 自抗扰控制器中扩张状态观测器的设计_人工智能_song430的博客-CSDN博客
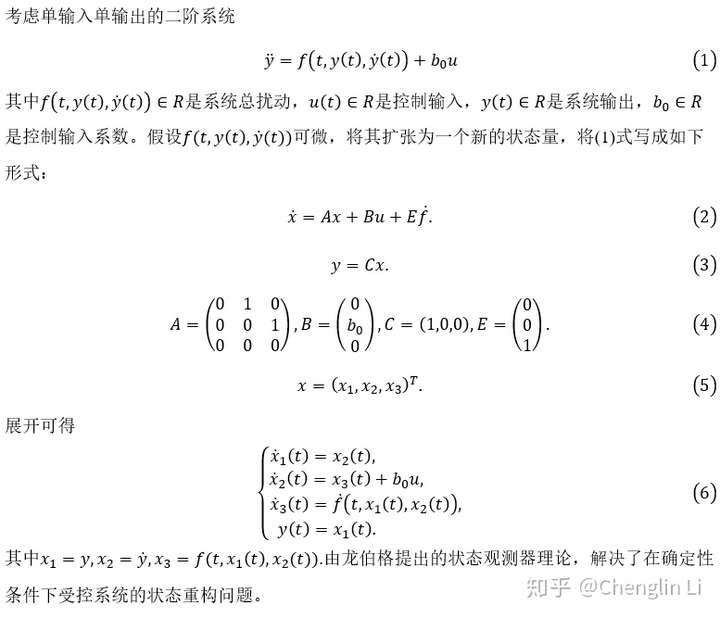
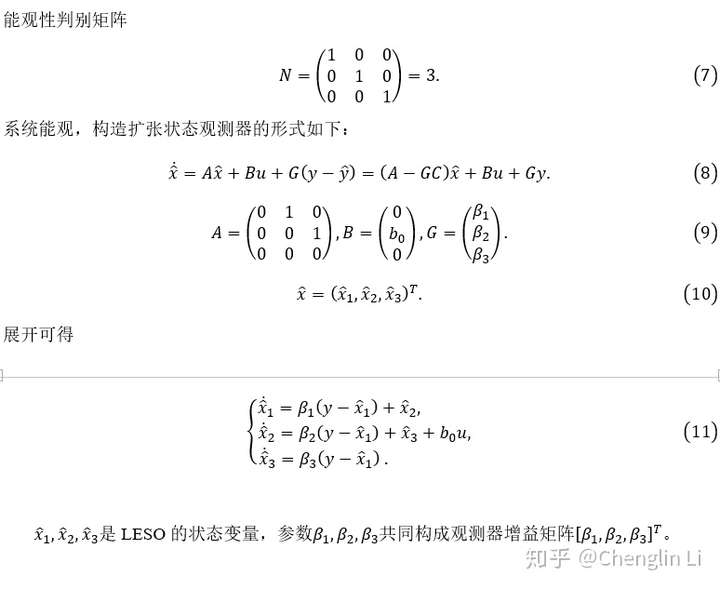
1 被控对象和观测器设计
2 扩张状态观测器跟踪误差方程

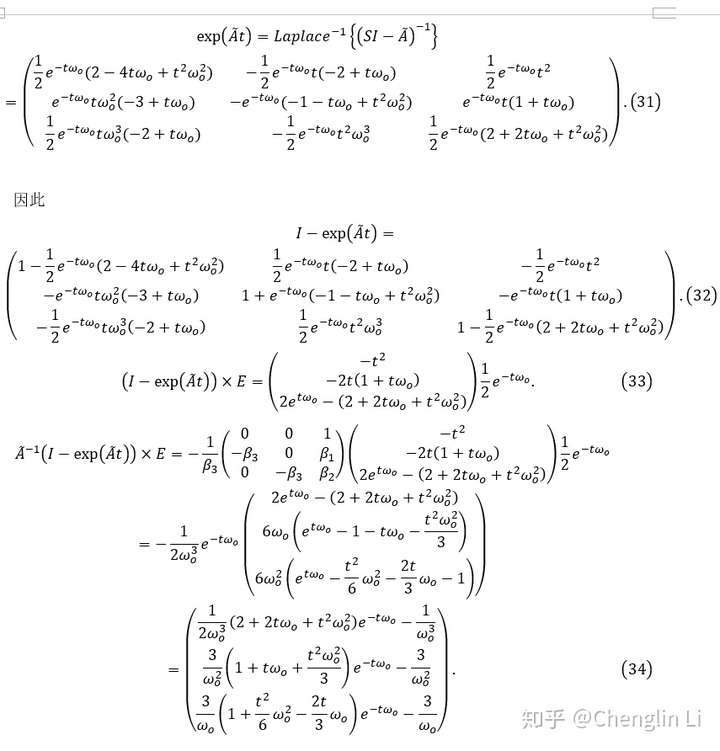
3 解算ESO误差方程

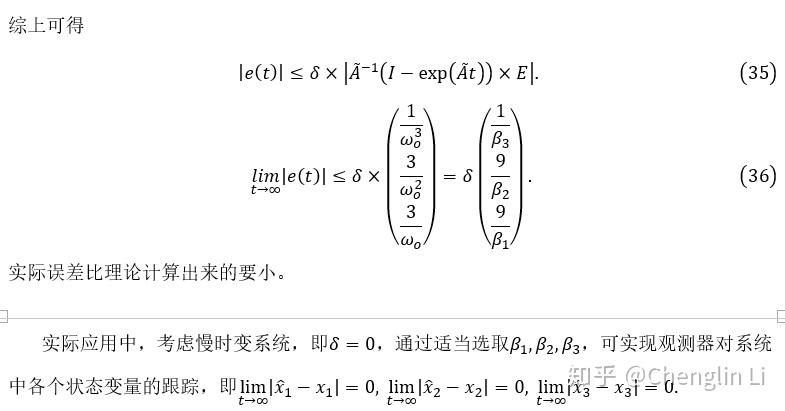
因此可得如下结论:
在线性时不变系统含有扰动时,且扰动导数有上界 ,那么扩张状态观测器ESO的跟踪误差有界,且远小于 ,即达到一种实用稳定。
进一步的,增大观测器增益系数,可以缩小误差的界。
——2020.06.01——




评论(0)
您还未登录,请登录后发表或查看评论