

为什么需要滑动窗口?
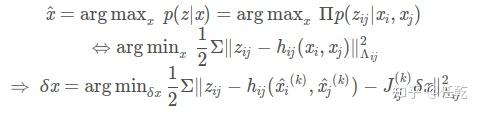
在SLAM问题中,状态估计问题被建模为最大后验概率问题,在假设为高斯分布的情况下即为最小化损失函数的一个最小二乘问题,并通过泰勒展开转化为增量迭代求解问题:
随着SLAM系统的运行,状态变量规模不断增大,如果使用滑动窗口,只对窗口内的相关变量进行优化便可以大大减小计算量。
为什么需要边缘化?
对于滑窗外的状态,我们不去进行优化,但也不能直接丢掉,这样会破坏原有的约束关系,损失约束信息。采用边缘化的技巧,将约束信息转化为待优化变量的先验分布,实际上是一个从联合分布中获得变量子集概率分布的问题。
怎样进行边缘化?
边缘化的方法是舒尔补。不做过多解释了,大家可以参考这篇文章
解释了这三个问题,我们其实就完成了理解VINS-Mono里这个问题的理论部分,下面看代码实践部分。
系统中和边缘化优化相关的代码存放在下列文件中:
1)vins_estimator/src/factor/marginalization_factor.cpp:边缘化的具体实现
2)vins_estimator/src/estimator.cpp(部分):
- 函数optimization负责利用边缘化残差构建优化模型
- 函数slideWindow负责维护滑动窗口
下面我们进入代码内部,看它的具体实现
1. addResidualBlockInfo:添加残差块信息
添加残差块相关信息(优化变量,待边缘化变量)
void MarginalizationInfo::addResidualBlockInfo(ResidualBlockInfo *residual_block_info)
{
factors.emplace_back(residual_block_info);
std::vector<double *> ¶meter_blocks = residual_block_info->parameter_blocks;
std::vector<int> parameter_block_sizes = residual_block_info->cost_function->parameter_block_sizes();
for (int i = 0; i < static_cast<int>(residual_block_info->parameter_blocks.size()); i++)
{
double *addr = parameter_blocks[i];
int size = parameter_block_sizes[i];
parameter_block_size[reinterpret_cast<long>(addr)] = size;
}
for (int i = 0; i < static_cast<int>(residual_block_info->drop_set.size()); i++)
{
double *addr = parameter_blocks[residual_block_info->drop_set[i]];
parameter_block_idx[reinterpret_cast<long>(addr)] = 0;
}
}
2. preMarginalize:更新参数块
计算每个残差,对应的Jacobian,并更新parameter_block_data
void MarginalizationInfo::preMarginalize()
{
for (auto it : factors)
{
it->Evaluate();
std::vector<int> block_sizes = it->cost_function->parameter_block_sizes();
for (int i = 0; i < static_cast<int>(block_sizes.size()); i++)
{
long addr = reinterpret_cast<long>(it->parameter_blocks[i]);
int size = block_sizes[i];
if (parameter_block_data.find(addr) == parameter_block_data.end())
{
double *data = new double[size];
memcpy(data, it->parameter_blocks[i], sizeof(double) * size);
parameter_block_data[addr] = data;
}
}
}
}
3. marginalize:执行边缘化
多线程构造先验项舒尔补AX=b的结构,计算Jacobian和残差
void MarginalizationInfo::marginalize()
{
int pos = 0;
for (auto &it : parameter_block_idx)
{
it.second = pos;
pos += localSize(parameter_block_size[it.first]);
}
m = pos;
for (const auto &it : parameter_block_size)
{
if (parameter_block_idx.find(it.first) == parameter_block_idx.end())
{
parameter_block_idx[it.first] = pos;
pos += localSize(it.second);
}
}
n = pos - m;
//ROS_DEBUG("marginalization, pos: %d, m: %d, n: %d, size: %d", pos, m, n, (int)parameter_block_idx.size());
TicToc t_summing;
Eigen::MatrixXd A(pos, pos);
Eigen::VectorXd b(pos);
A.setZero();
b.setZero();
TicToc t_thread_summing;
pthread_t tids[NUM_THREADS];
ThreadsStruct threadsstruct[NUM_THREADS];
int i = 0;
for (auto it : factors)
{
threadsstruct[i].sub_factors.push_back(it);
i++;
i = i % NUM_THREADS;
}
for (int i = 0; i < NUM_THREADS; i++)
{
TicToc zero_matrix;
threadsstruct[i].A = Eigen::MatrixXd::Zero(pos,pos);
threadsstruct[i].b = Eigen::VectorXd::Zero(pos);
threadsstruct[i].parameter_block_size = parameter_block_size;
threadsstruct[i].parameter_block_idx = parameter_block_idx;
int ret = pthread_create( &tids[i], NULL, ThreadsConstructA ,(void*)&(threadsstruct[i]));
if (ret != 0)
{
ROS_WARN("pthread_create error");
ROS_BREAK();
}
}
for( int i = NUM_THREADS - 1; i >= 0; i--)
{
pthread_join( tids[i], NULL );
A += threadsstruct[i].A;
b += threadsstruct[i].b;
}
//ROS_DEBUG("thread summing up costs %f ms", t_thread_summing.toc());
//ROS_INFO("A diff %f , b diff %f ", (A - tmp_A).sum(), (b - tmp_b).sum());
//TODO
Eigen::MatrixXd Amm = 0.5 * (A.block(0, 0, m, m) + A.block(0, 0, m, m).transpose());
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> saes(Amm);
//ROS_ASSERT_MSG(saes.eigenvalues().minCoeff() >= -1e-4, "min eigenvalue %f", saes.eigenvalues().minCoeff());
Eigen::MatrixXd Amm_inv = saes.eigenvectors() * Eigen::VectorXd((saes.eigenvalues().array() > eps).select(saes.eigenvalues().array().inverse(), 0)).asDiagonal() * saes.eigenvectors().transpose();
//printf("error1: %f\n", (Amm * Amm_inv - Eigen::MatrixXd::Identity(m, m)).sum());
//舒尔补
Eigen::VectorXd bmm = b.segment(0, m);
Eigen::MatrixXd Amr = A.block(0, m, m, n);
Eigen::MatrixXd Arm = A.block(m, 0, n, m);
Eigen::MatrixXd Arr = A.block(m, m, n, n);
Eigen::VectorXd brr = b.segment(m, n);
A = Arr - Arm * Amm_inv * Amr;
b = brr - Arm * Amm_inv * bmm;
Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> saes2(A);
Eigen::VectorXd S = Eigen::VectorXd((saes2.eigenvalues().array() > eps).select(saes2.eigenvalues().array(), 0));
Eigen::VectorXd S_inv = Eigen::VectorXd((saes2.eigenvalues().array() > eps).select(saes2.eigenvalues().array().inverse(), 0));
Eigen::VectorXd S_sqrt = S.cwiseSqrt();
Eigen::VectorXd S_inv_sqrt = S_inv.cwiseSqrt();
linearized_jacobians = S_sqrt.asDiagonal() * saes2.eigenvectors().transpose();
linearized_residuals = S_inv_sqrt.asDiagonal() * saes2.eigenvectors().transpose() * b;
}
4. optimization:负责边缘化残差的使用
这个函数位于vins_estimator/src/estimator.cpp文件中,而且它负责整个系统所有的优化工作,边缘化残差的使用只是它功能的一部分。
4.1 添加边缘化残差
if (last_marginalization_info)
{
// construct new marginlization_factor
MarginalizationFactor *marginalization_factor = new MarginalizationFactor(last_marginalization_info);
problem.AddResidualBlock(marginalization_factor, NULL,
last_marginalization_parameter_blocks);
}
4.2 边缘化策略
边缘化分两种情况,每种情况有各自的流程
a. 如果次新帧是关键帧,则将边缘化最老帧,及其看到的路标点和IMU数据,转化为先验。具体流程为:
1)将上一次先验残差项传递给marginalization_info
2)将第0帧和第1帧间的IMU因子IMUFactor(pre_integrations[1]),添加到marginalization_info中
3)将第一次观测为第0帧的所有路标点对应的视觉观测,添加到marginalization_info中
4)计算每个残差,对应的Jacobian,并将各参数块拷贝到统一的内存(parameter_block_data)中
5)多线程构造先验项舒尔补AX=b的结构,在X0处线性化计算Jacobian和残差
6)调整参数块在下一次窗口中对应的位置(往前移一格),注意这里是指针,后面slideWindow中会赋新值,这里只是提前占座
b. 如果次新帧不是关键帧,此时具体流程为:
1)保留次新帧的IMU测量,丢弃该帧的视觉测量,将上一次先验残差项传递给marginalization_info
2)premargin:计算每个残差,对应的Jacobian,并更新parameter_block_data
3)marginalize:构造先验项舒尔补AX=b的结构,计算Jacobian和残差
4)调整参数块在下一次窗口中对应的位置(去掉次新帧)
if (marginalization_flag == MARGIN_OLD)
{
MarginalizationInfo *marginalization_info = new MarginalizationInfo();
vector2double();
//1、将上一次先验残差项传递给marginalization_info
if (last_marginalization_info)
{
vector<int> drop_set; for (int i = 0; i < static_cast<int>(last_marginalization_parameter_blocks.size()); i++)
{
if (last_marginalization_parameter_blocks[i] == para_Pose[0] ||
last_marginalization_parameter_blocks[i] == para_SpeedBias[0])
drop_set.push_back(i);
}
// construct new marginlization_factor
MarginalizationFactor *marginalization_factor = new MarginalizationFactor(last_marginalization_info);
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(marginalization_factor, NULL,
last_marginalization_parameter_blocks,
drop_set);
marginalization_info->addResidualBlockInfo(residual_block_info);
}
//2、将第0帧和第1帧间的IMU因子IMUFactor(pre_integrations[1]),添加到marginalization_info中
{
if (pre_integrations[1]->sum_dt < 10.0)
{
IMUFactor* imu_factor = new IMUFactor(pre_integrations[1]);
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(imu_factor, NULL,
vector<double *>{para_Pose[0], para_SpeedBias[0], para_Pose[1], para_SpeedBias[1]},
vector<int>{0, 1});
marginalization_info->addResidualBlockInfo(residual_block_info);
}
}
//3、将第一次观测为第0帧的所有路标点对应的视觉观测,添加到marginalization_info中
{
int feature_index = -1;
for (auto &it_per_id : f_manager.feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
++feature_index;
int imu_i = it_per_id.start_frame, imu_j = imu_i - 1;
if (imu_i != 0)
continue;
Vector3d pts_i = it_per_id.feature_per_frame[0].point;
for (auto &it_per_frame : it_per_id.feature_per_frame)
{
imu_j++;
if (imu_i == imu_j)
continue;
Vector3d pts_j = it_per_frame.point;
if (ESTIMATE_TD)
{
ProjectionTdFactor *f_td = new ProjectionTdFactor(pts_i, pts_j, it_per_id.feature_per_frame[0].velocity, it_per_frame.velocity,
it_per_id.feature_per_frame[0].cur_td, it_per_frame.cur_td,
it_per_id.feature_per_frame[0].uv.y(), it_per_frame.uv.y());
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(f_td, loss_function,
vector<double *>{para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index], para_Td[0]},
vector<int>{0, 3});
marginalization_info->addResidualBlockInfo(residual_block_info);
}
else
{
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(f, loss_function,
vector<double *>{para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index]},
vector<int>{0, 3});
marginalization_info->addResidualBlockInfo(residual_block_info);
}
}
}
}
TicToc t_pre_margin;
//4、计算每个残差,对应的Jacobian,并将各参数块拷贝到统一的内存(parameter_block_data)中
marginalization_info->preMarginalize();
ROS_DEBUG("pre marginalization %f ms", t_pre_margin.toc());
TicToc t_margin;
//5、多线程构造先验项舒尔补AX=b的结构,在X0处线性化计算Jacobian和残差
marginalization_info->marginalize();
ROS_DEBUG("marginalization %f ms", t_margin.toc());
//6.调整参数块在下一次窗口中对应的位置(往前移一格),注意这里是指针,后面slideWindow中会赋新值,这里只是提前占座
std::unordered_map<long, double *> addr_shift;
for (int i = 1; i <= WINDOW_SIZE; i++)
{
addr_shift[reinterpret_cast<long>(para_Pose[i])] = para_Pose[i - 1];
addr_shift[reinterpret_cast<long>(para_SpeedBias[i])] = para_SpeedBias[i - 1];
}
for (int i = 0; i < NUM_OF_CAM; i++)
addr_shift[reinterpret_cast<long>(para_Ex_Pose[i])] = para_Ex_Pose[i];
if (ESTIMATE_TD)
{
addr_shift[reinterpret_cast<long>(para_Td[0])] = para_Td[0];
}
vector<double *> parameter_blocks = marginalization_info->getParameterBlocks(addr_shift);
if (last_marginalization_info)
delete last_marginalization_info;
last_marginalization_info = marginalization_info;
last_marginalization_parameter_blocks = parameter_blocks;
}
//如果次新帧不是关键帧:
else
{
if (last_marginalization_info &&
std::count(std::begin(last_marginalization_parameter_blocks), std::end(last_marginalization_parameter_blocks), para_Pose[WINDOW_SIZE - 1]))
{
//1.保留次新帧的IMU测量,丢弃该帧的视觉测量,将上一次先验残差项传递给marginalization_info
MarginalizationInfo *marginalization_info = new MarginalizationInfo();
vector2double();
if (last_marginalization_info)
{
vector<int> drop_set;
for (int i = 0; i < static_cast<int>(last_marginalization_parameter_blocks.size()); i++)
{
ROS_ASSERT(last_marginalization_parameter_blocks[i] != para_SpeedBias[WINDOW_SIZE - 1]);
if (last_marginalization_parameter_blocks[i] == para_Pose[WINDOW_SIZE - 1])
drop_set.push_back(i);
}
// construct new marginlization_factor
MarginalizationFactor *marginalization_factor = new MarginalizationFactor(last_marginalization_info);
ResidualBlockInfo *residual_block_info = new ResidualBlockInfo(marginalization_factor, NULL,
last_marginalization_parameter_blocks,
drop_set);
marginalization_info->addResidualBlockInfo(residual_block_info);
}
//2、premargin
TicToc t_pre_margin;
ROS_DEBUG("begin marginalization");
marginalization_info->preMarginalize();
ROS_DEBUG("end pre marginalization, %f ms", t_pre_margin.toc());
//3、marginalize
TicToc t_margin;
ROS_DEBUG("begin marginalization");
marginalization_info->marginalize();
ROS_DEBUG("end marginalization, %f ms", t_margin.toc());
//4.调整参数块在下一次窗口中对应的位置(去掉次新帧)
std::unordered_map<long, double *> addr_shift;
for (int i = 0; i <= WINDOW_SIZE; i++)
{
if (i == WINDOW_SIZE - 1)
continue;
else if (i == WINDOW_SIZE)
{
addr_shift[reinterpret_cast<long>(para_Pose[i])] = para_Pose[i - 1];
addr_shift[reinterpret_cast<long>(para_SpeedBias[i])] = para_SpeedBias[i - 1];
}
else
{
addr_shift[reinterpret_cast<long>(para_Pose[i])] = para_Pose[i];
addr_shift[reinterpret_cast<long>(para_SpeedBias[i])] = para_SpeedBias[i];
}
}
for (int i = 0; i < NUM_OF_CAM; i++)
addr_shift[reinterpret_cast<long>(para_Ex_Pose[i])] = para_Ex_Pose[i];
if (ESTIMATE_TD)
{
addr_shift[reinterpret_cast<long>(para_Td[0])] = para_Td[0];
}
vector<double *> parameter_blocks = marginalization_info->getParameterBlocks(addr_shift);
if (last_marginalization_info)
delete last_marginalization_info;
last_marginalization_info = marginalization_info;
last_marginalization_parameter_blocks = parameter_blocks;
}
}
5. slideWindow:实现滑窗的更新
如果次新帧是关键帧,则边缘化最老帧,将其看到的特征点和IMU数据转化为先验信息,如果次新帧不是关键帧,则舍弃视觉测量而保留IMU测量值,从而保证IMU预积分的连贯性。
void Estimator::slideWindow()
{
TicToc t_margin;
if (marginalization_flag == MARGIN_OLD)
{
back_R0 = Rs[0];
back_P0 = Ps[0];
if (frame_count == WINDOW_SIZE)
{
for (int i = 0; i < WINDOW_SIZE; i++)
{
Rs[i].swap(Rs[i + 1]);
std::swap(pre_integrations[i], pre_integrations[i + 1]);
dt_buf[i].swap(dt_buf[i + 1]);
linear_acceleration_buf[i].swap(linear_acceleration_buf[i + 1]);
angular_velocity_buf[i].swap(angular_velocity_buf[i + 1]);
Headers[i] = Headers[i + 1];
Ps[i].swap(Ps[i + 1]);
Vs[i].swap(Vs[i + 1]);
Bas[i].swap(Bas[i + 1]);
Bgs[i].swap(Bgs[i + 1]);
}
Headers[WINDOW_SIZE] = Headers[WINDOW_SIZE - 1];
Ps[WINDOW_SIZE] = Ps[WINDOW_SIZE - 1];
Vs[WINDOW_SIZE] = Vs[WINDOW_SIZE - 1];
Rs[WINDOW_SIZE] = Rs[WINDOW_SIZE - 1];
Bas[WINDOW_SIZE] = Bas[WINDOW_SIZE - 1];
Bgs[WINDOW_SIZE] = Bgs[WINDOW_SIZE - 1];
delete pre_integrations[WINDOW_SIZE];
pre_integrations[WINDOW_SIZE] = new IntegrationBase{acc_0, gyr_0, Bas[WINDOW_SIZE], Bgs[WINDOW_SIZE]};
dt_buf[WINDOW_SIZE].clear();
linear_acceleration_buf[WINDOW_SIZE].clear();
angular_velocity_buf[WINDOW_SIZE].clear();
if (true || solver_flag == INITIAL)
{
double t_0 = Headers[0].stamp.toSec();
map<double, ImageFrame>::iterator it_0;
it_0 = all_image_frame.find(t_0);
delete it_0->second.pre_integration;
all_image_frame.erase(all_image_frame.begin(), it_0);
}
//滑动窗口边缘化最老帧时处理特征点被观测的帧号
slideWindowOld();
}
}
else
{
if (frame_count == WINDOW_SIZE)
{
for (unsigned int i = 0; i < dt_buf[frame_count].size(); i++)
{
double tmp_dt = dt_buf[frame_count][i];
Vector3d tmp_linear_acceleration = linear_acceleration_buf[frame_count][i];
Vector3d tmp_angular_velocity = angular_velocity_buf[frame_count][i];
pre_integrations[frame_count - 1]->push_back(tmp_dt, tmp_linear_acceleration, tmp_angular_velocity);
dt_buf[frame_count - 1].push_back(tmp_dt);
linear_acceleration_buf[frame_count - 1].push_back(tmp_linear_acceleration);
angular_velocity_buf[frame_count - 1].push_back(tmp_angular_velocity);
}
Headers[frame_count - 1] = Headers[frame_count];
Ps[frame_count - 1] = Ps[frame_count];
Vs[frame_count - 1] = Vs[frame_count];
Rs[frame_count - 1] = Rs[frame_count];
Bas[frame_count - 1] = Bas[frame_count];
Bgs[frame_count - 1] = Bgs[frame_count];
delete pre_integrations[WINDOW_SIZE];
pre_integrations[WINDOW_SIZE] = new IntegrationBase{acc_0, gyr_0, Bas[WINDOW_SIZE], Bgs[WINDOW_SIZE]};
dt_buf[WINDOW_SIZE].clear();
linear_acceleration_buf[WINDOW_SIZE].clear();
angular_velocity_buf[WINDOW_SIZE].clear();
//滑动窗口边缘化次新帧时处理特征点被观测的帧号
slideWindowNew();
}
}
}



评论(0)
您还未登录,请登录后发表或查看评论