
代码链接代码
摘要
在许多道路交通状况不受限制的亚洲国家,不戴头盔和骑三车等违章驾驶是摩托车死亡的重要来源。识别和惩罚此类骑手对于遏制道路交通事故和提高公民安全至关重要。出于这种动机,我们提出了一种方法,用于检测,跟踪和计数从车载仪表板摄像机拍摄的视频中的摩托车骑行违规行为。我们采用基于课程学习的对象检测器来更好地应对诸如遮挡之类的具有挑战性的场景。我们引入了一种新颖的梯形对象边界表示形式,以提高鲁棒性并解决骑手-摩托车的关联。我们还介绍了一种amodal回归器,该回归器为被遮挡的骑手生成边界框。在大规模无约束驱动数据集上的实验结果表明,与现有方法和其他消融变体相比,我们的方法具有优越性。
数据集
我们训练各种识别摩托车违规的模型。我们使用印度驾驶数据集 (IDD) [26] 的子集,通过选择带有摩托车和骑手的图像,然后基于900平方像素的面积阈值过滤出小边界框,因为低分辨率框将噪声样本添加到训练数据。我们注释了头盔类、无头盔类和梯形驾驶实例类 (参见图2 b-d,i-k)。我们使用常规的矩形框来违反头盔,并提出了梯形边界框来检测三重骑行违规。现在我们讨论如何对数据集进行预处理。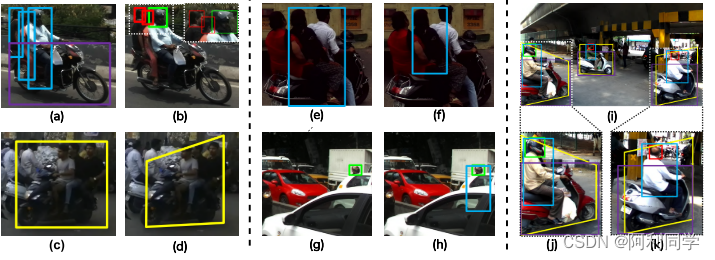
研究重点
由于摩托车与其骑手之间的重叠区域,通用的两类骑手-摩托车检测器的性能较差。由于一个或多个重叠预测的置信度较低和非最大抑制 (NMS),重叠区域导致类间混淆,进而导致假阴性。如图3 (a) 所示,我们提出了一种基于CL的检测器,以避免此类问题。该模型首先仅在摩托车实例上进行训练,然后在添加rider实例后进行重新训练。正如我们将在第二节看到的。如图5所示,与通用模型相比,召回率显着提高,这是假阳性减少的结果。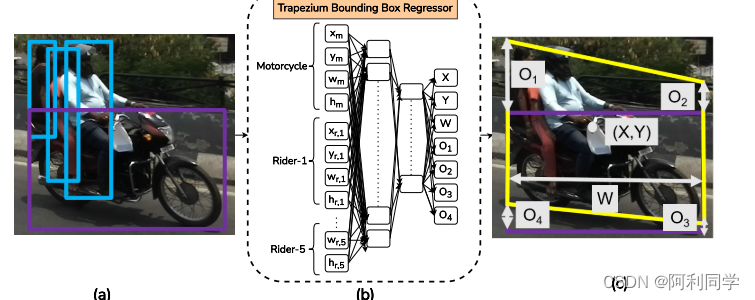
与之相交的每个预测的摩托车框和骑手边界框都形成了梯形回归器的输入。回归器检测驾驶实例,以计算具有最高欠条的骑手箱和获得的梯形; 识别三重骑行违规。由此导致的假阳性骑手对应关系的减少也导致Tab中的三重骑行违规的大量55.44% 精度增益。2. (a) (b) © 图4。不同的基于IOU的相关方法将骑手与他们的摩托车联系起来。
注意



评论(0)
您还未登录,请登录后发表或查看评论