

飞控采用mavlink消息进行数据的传输。普遍说法是,现有的mavlink消息几乎已经涵盖了所有你的能想象到的内容,完全可以覆盖多处需求。 无奈科研总是要定义一些新鲜玩意 ,所以总是有无法完全满足需求,需要自定义消息的时候。
- mavlink 消息的创建,首先在
common.xml文件中找到对应的message部分,在common.xml文件的最后部分, 对应复制一个message消息,修改对应的消息ID,消息名称,消息内容,然后编译即可,生成对应的.h文件,对应的.h文件在build/XXX/libraries/GCS_Mavlink/…/common/下面,对应的默认生成名字为mavlink_msg_XXX.h - 对应默认生成的
mavlink_msg_XXX.h中主要包含有如下几个函数
mavlink_msg_XXX_pack( )
mavlink_msg_XXX_pack_chan( )
mavlink_msg_XXX_encode( )
mavlink_msg_XXX_encode_chan( )
mavlink_msg_XXX_send( )
mavlink_msg_XXX_send_struct( )
其中常用的是mavlink_msg_XXX_send()。 - 但是地面站中是无法显示自己定义的mavlink消息的,初步认为地面站要显示自己定义的mavlink消息,需要修改地面站源码。那么只能修改现有的mavlink消息了…
- 一个比较重要的函数是
在文件gcs_common.h下面 GCS_MAVLINK::try_send_message( )
switch(id){
添加 case XXX: 以及相应的语句. 但是在case中添加自定义的消息却不会被发送出去。暂时没有找到相应原因。因此,综合上述3,4,选择修改现有的Mavlink消息 - 考虑到要发送的消息中含有float数据类型,选择修改
attitude_quaternion消息, 如下图所示: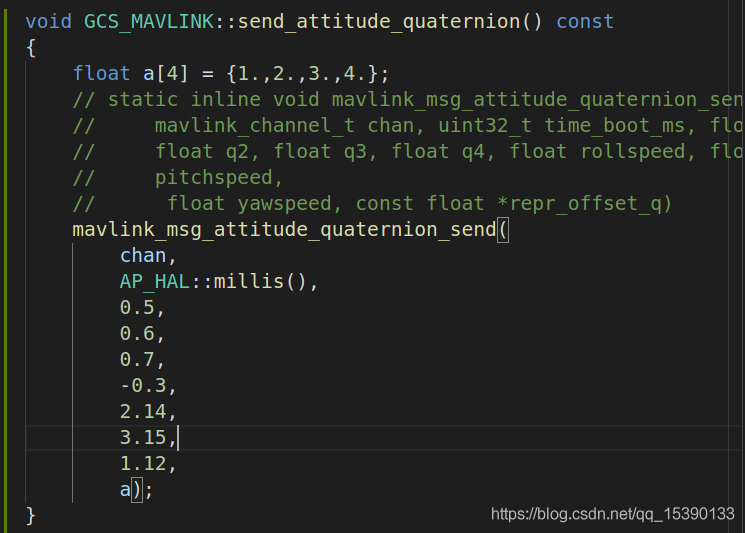
并且将上述函数同attitude 的mavlink消息放在同一个case 下面。从mission planner地面站中可以看到对应的消息已经出现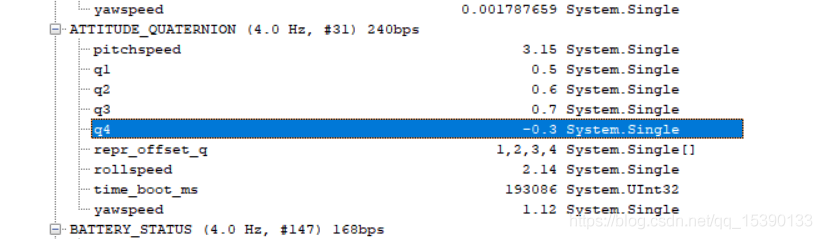
- 由于dronekit 自带的vehicle属性中没有对 ATTITUDE_QUATERNION 消息的订阅,所以需要参照 dronekit 官网完成对 该 mavlink消息的添加监听工作。其对应的代码如下:
import time
from dronekit import Vehicle, connect
import numpy as np
class RawQuaternion(object):
def __init__(self, time_boot_us=None, q1=None, q2=None, q3=None, q4=None, rollspeed=None, pitchspeed=None, yawspeed=None, off=None ):
self.time_boot_us = time_boot_us
self.q1 = q1
self.q2 = q2
self.q3 = q3
self.q4 = q4
self.rollspeed = rollspeed
self.pitchspeed = pitchspeed
self.yawspeed = yawspeed
self.off = off
class Myvehicle(Vehicle):
def __init__(self, *args):
super(Myvehicle, self).__init__(*args)
self._raw_quaternion = RawQuaternion()
@self.on_message(‘ATTITUDE_QUATERNION’)
def listener(self, name, message):
self._raw_quaternion.time_boot_us = message.time_boot_ms
self._raw_quaternion.q1 = message.q1
self._raw_quaternion.q2 = message.q2
self._raw_quaternion.q3 = message.q3
self._raw_quaternion.q4 = message.q4
self._raw_quaternion.rollspeed = message.rollspeed
self._raw_quaternion.pitchspeed = message.pitchspeed
self._raw_quaternion.yawspeed = message.yawspeed
self._raw_quaternion.off = message.repr_offset_q
self.notify_attribute_listeners(‘attitude_quaternion’,self._raw_quaternion)
@property
def raw_quaternion(self):
quaternion_np = np.array([self._raw_quaternion.q1,self._raw_quaternion.q2,self._raw_quaternion.q3,self._raw_quaternion.q4])
return quaternion_np
@property
def raw_anglespeed(self):
anglespeed_np = np.array([self._raw_quaternion.rollspeed, self._raw_quaternion.pitchspeed, self._raw_quaternion.yawspeed])
return anglespeed_np
vehicle1=connect(‘127.0.0.1:14551’,wait_ready=True, vehicle_class= Myvehicle)
while True:
time.sleep(0.5)
print(vehicle1.raw_quaternion, end=“”)
print(vehicle1.raw_anglespeed)

其代码显示结果如下: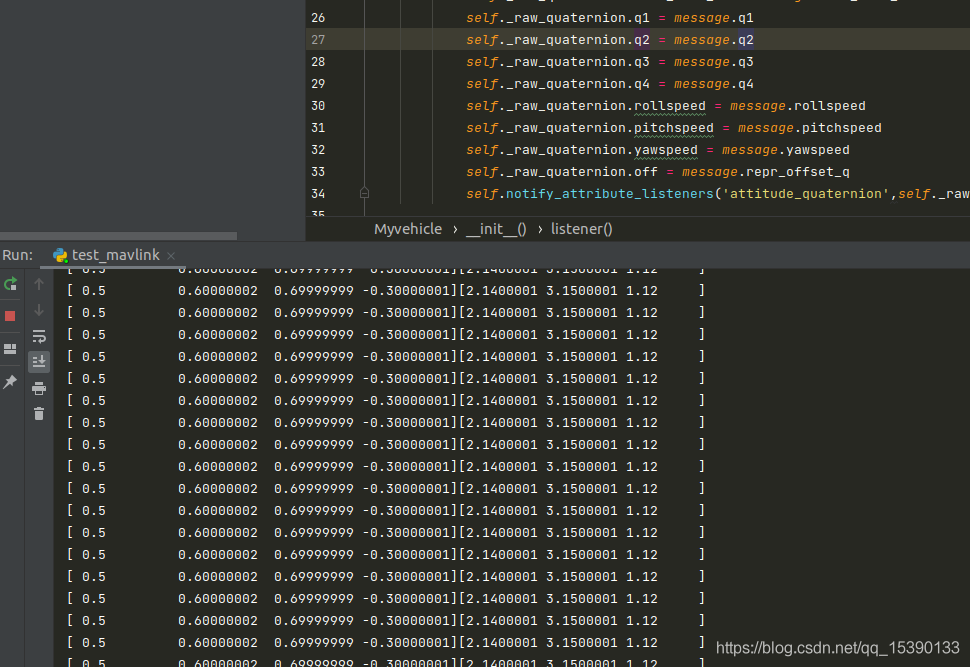
至此可以在python中显示自己需要发送的数据了。



评论(0)
您还未登录,请登录后发表或查看评论