

一.NEC协议
网上资料很多,此处大致讲解。
1.NEC协议对于逻辑“0”和“1”的表示方式:
由560us高电平接上不同长度的低电平,即逻辑“1”的脉冲周期2.25ms,逻辑“0”的脉冲周期1.12ms。
2.NEC协议的发送格式:
首先发送9ms高电平和4.5ms低电平的同步码头代表开始信号。接着以上述逻辑表示发送8位地址码,8位地址反码,8位命令码和8位命令反码(发送顺序均为低位在前,高位在后)。(地址码可理解为遥控器自身固定的ID,以此可通过程序来识别是否为指定的遥控器发送;命令码可以理解为遥控器每个按键固定的键值,以此可确定是由哪个按键发出)
3.特殊情况(按住不放)
如果按住某个键不放,在发送完第一次完整的信号后,会每隔110ms发送一段重复的码。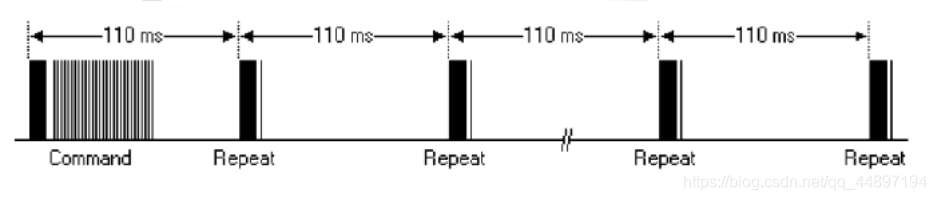
特别注意:以上是针对发送端的数据格式,接收端会接收到其反码(即将上述的所有高低电平交换),详细可见代码。
二.代码
红外解码需要用到外部中断,对每次边沿进行检测,并在外部中断服务函数中对其进行处理。本实验使用的是外部中断1,所以要先用杜邦线将红外接收引脚与INT1/P3.3口相连。(本实验不检测连续按)
#include "STC15F2K60S2.h" #include "intrins.h" //使用数码管对键值进行显示 unsigned char code smg_duan[ ]={ 0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x00}; unsigned char code smg_wei[ ]={ 0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; sbit led1=P0^0; sbit IR_INPUT=P3^3; //外部中断引脚 bit irflag=0; //接收信号标志位 unsigned char ircode[4]; //接收码值缓存区,按序存放,地址码,地址反码,键值码和键值反码 unsigned char display[4]; //键码显示缓存区 //定时器0初始化,用于数码管显示 void Timer0Init(void) //1ms@11.0592MHz { TMOD &= 0xF0; //定时器0为16位自动重装载定时器 TL0 = 0xCD; TH0 = 0xD4; TF0 = 0; //清楚定时器0溢出标志位 TR0 = 1; //打开定时器0 ET0=1; //打开定时器0中断 EA=1; //打开总中断 } //红外接收初始化函数,定时器1用于高低电平计时,外部中断1用于检测边沿 void initinfrared() { IR_INPUT=1; //初始化中断引脚,等待接收下降沿 TMOD&=0x0F; TMOD|=0x10; //定时器1为16位不可重装载模式 AUXR&=0x3f; AUXR|=0x80; //定时器1,12分频 //注意定时器的精确频率计算:11.0592/12MHz,即每12/11.0592计数器加1 TR1=0; //定时器1关闭 ET1=0; //定时器1中断允许 IT1=1; //外部中断1设为下边沿触发 EX1=1; //外部中断1允许 } //获取高电平时间 unsigned int GetHighTime() { TH1=0; //复位计数器 TL1=0; TR1=1; //打开定时器1 while(IR_INPUT) { if(TH1>0x40) //超出规定时间即信号有误,则不返回高电平时间 { break; } } TR1=0; return(TH1*256+TL1); } //获取低电平时间 unsigned int GetLowTime() { TH1=0; TL1=0; TR1=1; while(!IR_INPUT) { if(TH1>0x40) { break; } } TR1=0; return(TH1*256+TL1); } //外部中断1函数 void EXINT_ISR() interrupt 2 { unsigned char i, j; unsigned int time; unsigned char byte; //引导码确认 time=GetLowTime(); //先获取低电平,因为接收与发送电平相反 if((time<7833)||(time>8755)) //12/11.0592*7833≈8500us,12/11.0592*8755≈9500us,协议规定9ms { IE1=0; //外部中断1标志位清零 return; //不在规定范围,引导码有误 } time = GetHighTime(); if((time<3686)||(time>4608)) //12/11.0592*3686≈4000us,12/11.0592*4608≈5000us,协议规定4.5ms { IE1=0; return; } //,引导码正确,开始获取地址码,地址反码,键值码,键值反码并存入缓存区 for(i=0;i<4;i++) { for(j=0;j<8;j++) { time=GetLowTime(); if((time<313)||(time>718)) //推导与上述类似 { IE1=0; return; } time=GetHighTime(); if((time>313)&&(time<718)) { byte>>=1; } else if((time>1345)&&(time<1751)) { byte>>=1; byte|=0x80; } else { IE1=0; return; } } ircode[i]=byte; //把获取到的8位码存入缓存数组 } irflag=1;//成功接收到码值 IE1=0; } void main(void) { Timer0Init(); //1ms initinfrared(); led1=1; while(1) { if(irflag) //显示遥控器ID和按键值 { display[0]=smg_duan[ircode[0]/10]; display[1]=smg_duan[ircode[0]%10]; display[2]=smg_duan[ircode[2]/10]; display[3]=smg_duan[ircode[2]%10]; irflag=0; } switch(ircode[2])//根据键值,控制LED和继电器(键值根据遥控器进行更改) { case 22: P2=0x80;P0=0xfe;P2=0x00; break; case 25: P2=0x80;P0=0xff;P2=0x00; break; case 13: P2=0xa0;P0=0xff;P2=0x00; break; case 12: P2=0xa0;P0=0x00;P2=0x00; break; } } } //定时器0用于数码管显示 void time0() interrupt 1 using 1 { static unsigned int smg_count=0,i=0; smg_count++; if(smg_count==2) //2ms { smg_count=0; P2=0xc0;P0=0x00;P2=0x00; //消隐 P2=0xe0;P0=~display[i];P2=0x00; P2=0xce;P0=smg_wei[i];P2=0x00; i++; if(i==4) i=0; } } /* 我的遥控器键值,对于不同遥控器可先用上述代码,测出其所有对应键值 power 69 alien 71 up 70 down 21 left 68 right 67 open 64 vol- 7 vol+ 9 1 22 2 25 3 13 4 12 5 24 6 94 7 8 8 28 9 90 0 66 返回 74 */
注:红外通信需要占用一个外部中断和一个定时器,如果觉得占用资源过多,可以在计时方面用软件计时而不用定时器,但精确计算较为麻烦。


评论(0)
您还未登录,请登录后发表或查看评论